







 超级会员免费看
超级会员免费看
文章目录
1 结论及区别
在大多数情况下,二者是相等的,但不总是完全相等。下面是它们的含义和一些区别:
- 1.
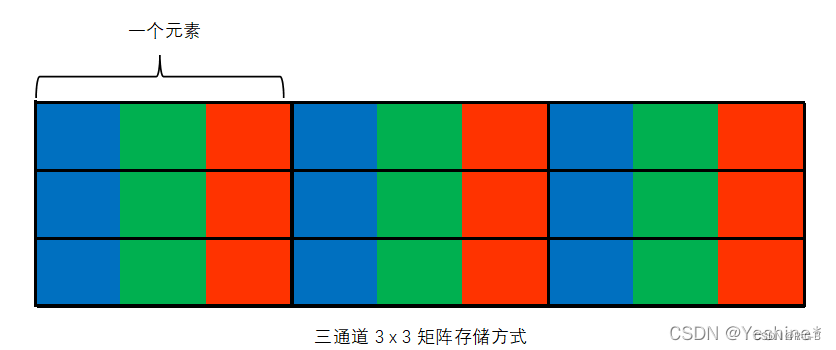
img.total() * img.elemSize()表示图像的总字节数,其中img.total()是图像中像素的总数,img.elemSize()是每个像素的字节数。 - 2.
img.cols * img.rows * img.channels()也表示图像的总字节数,其中img.cols是图像的列数,img.rows是图像的行数,img.channels()是图像的通道数,通常是3(RGB图像)或1(灰度图像)。
这两种方法应该得到相同的结果,因为它们都是计算图像的总字节数。然而,有一些情况下它们可能会有细微差异:
-
如果图像的通道数不同,那么两者将不相等。
-
在OpenCV中,图像的存储布局可能会导致额外的填充字节,这可能会导致两者不相等。这通常发生在使用不连续的存储布局或非常规存储布局的情况下,但在大多数情况下不会发生。
综上所述,虽然这两种方法在大多数情况下会得到相同的结果,

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











