






1.左右相机拍摄标定板图片
2.matlab进行双目标定
(1)打开matlab,并在app中找到Stereo Camera Calibrator

(2)点击Add Images,添加图片路径
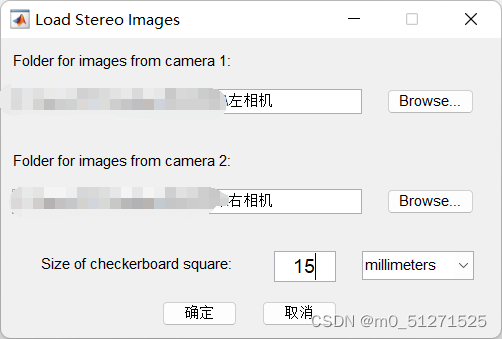
Size of checkerboard square为棋盘中每一个方格的长度,单位为毫米。
(3)设置Radial Distortion Compute
1.Radial Distortion 径向畸变
其中:
2 Coefficients选项的官方含义:
Use fourth degree polynomial to estimate the radial distortion of a lens.
使用四次多项式来估计透镜的径向畸变。
3 Coefficients选项的官方含义:
This setting is recommended only for wide field of view camera.
Use sixth degree polynomial to estimate the radial distortion of a lens.
此设置仅适用于大视场相机。
使用六次多项式来估计透镜的径向畸变。
如果选择2Coefficients的话,结果的径向畸变只有k1,k2,主要用于普通相机;如果选择3Coefficients的话,结果的径向畸变会有三项,主要用于鱼眼摄像机。
2. Compute
关于Skew
Assume that X-axis and Y-axis are not perpendicular. This means that the image pixels are not rectangular. Most modern cameras do not exhibit this issue.
假设X轴和Y轴不垂直。这意味着图像像素不是矩形的。大多数现代相机都没有这个问题。
所以,Skew选项一般不需要选择。
关于Tangential Distortion
Tangential distortion occurs when the lens’ principal axis is not perpendicular to the camera sensor.
当镜头的主轴与相机传感器不垂直时,会发生切向失真。
一般而言,Radial Distortion Compute选择3 Coefficients和Tangential Distortion,然后点击Calibrate进行校准。
(4)保存结果
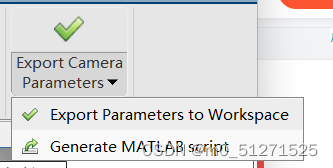
1.标定好后将标定数据导入到工作空间,点击Export Parameters to Workspaces即可
2.导出标定数据
rowName = cell(1,10);
rowName{1,1} = '平移矩阵';
rowName{1,2} = '旋转矩阵';
rowName{1,3} = '相机1内参矩阵';
rowName{1,4} = '相机1径向畸变';
rowName{1,5} = '相机1切向畸变';
rowName{1,6} = '相机2内参矩阵';
rowName{1,7} = '相机2径向畸变';
rowName{1,8} = '相机2切向畸变';
rowName{1,9} = '相机1畸变向量';
rowName{1,10} = '相机2畸变向量';
xlswrite('out.xlsx',rowName(1,1),1,'A1');
xlswrite('out.xlsx',rowName(1,2),1,'A2');
xlswrite('out.xlsx',rowName(1,3),1,'A5');
xlswrite('out.xlsx',rowName(1,4),1,'A8');
xlswrite('out.xlsx',rowName(1,5),1,'A9');
xlswrite('out.xlsx',rowName(1,6),1,'A10');
xlswrite('out.xlsx',rowName(1,7),1,'A13');
xlswrite('out.xlsx',rowName(1,8),1,'A14');
xlswrite('out.xlsx',rowName(1,9),1,'A15');
xlswrite('out.xlsx',rowName(1,10),1,'A16');
xlswrite('out.xlsx',stereoParams.TranslationOfCamera2,1,'B1'); % 平移矩阵
xlswrite('out.xlsx',stereoParams.RotationOfCamera2.',1,'B2'); % 旋转矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters1.IntrinsicMatrix.',1,'B5'); % 相机1内参矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters1.RadialDistortion,1,'B8'); % 相机1径向畸变(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters1.TangentialDistortion,1,'B9'); % 相机1切向畸变(3,4)
xlswrite('out.xlsx',stereoParams.CameraParameters2.IntrinsicMatrix.',1,'B10'); % 相机2内参矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters2.RadialDistortion,1,'B13'); % 相机2径向畸变(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters2.TangentialDistortion,1,'B14'); % 相机2切向畸变(3,4)
xlswrite('out.xlsx',[stereoParams.CameraParameters1.RadialDistortion(1:2), stereoParams.CameraParameters1.TangentialDistortion,...
stereoParams.CameraParameters1.RadialDistortion(3)],1,'B15'); % 相机1畸变向量
xlswrite('out.xlsx',[stereoParams.CameraParameters2.RadialDistortion(1:2), stereoParams.CameraParameters2.TangentialDistortion,...
stereoParams.CameraParameters2.RadialDistortion(3)],1,'B16'); % 相机2畸变向量
这篇文章借鉴了好多文章,谢谢大家!















 1808
1808











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









