







Dense Nested Attention Network for Infrared Small Target Detection
用于红外小目标检测的密集嵌套注意力网络
摘要
单帧红外小目标 (SIRST) 检测旨在将小目标与杂波背景分离。现有的基于CNN的方法不能直接应用于红外小目标,因为在其网络中汇集层可能会导致深层目标的丢失。
本文提出了一种密集嵌套注意力网络(DNA-Net)
设计了一个密集嵌套交互模块(DNIM),以实现高级和低级特征之间的渐进式交互。通过DNIM中的重复交互,可以保持深层红外小目标的信息。
提出了级联信道和空间注意力模块(CSAM)来自适应增强多级特征。通过我们的DNA-Net,小目标的上下文信息可以通过重复融合和增强得到很好的整合和充分利用。
开发了红外小目标数据集(即NUDT-SIRST),并提出了一套评估指标来进行全面的性能评估。在公共数据集和我们自行开发的数据集上的实验证明了我们方法的有效性。
Introduction
红外小目标检测特点:
1)小:由于成像距离长,红外目标一般较小,图像中的像素从1个像素到几十个像素不等。
2)暗淡:红外目标通常具有较低的信杂比(SCR),并且容易沉浸在高噪声和杂波背景中。
3)无形:红外小目标的形状特性有限。
4)可变性:红外目标的大小和形状在不同场景下差异很大。
本文贡献:
• 我们提出了一个DNA-Net来维持深层中的小靶标。通过重复的特征融合和增强,可以很好地整合和充分利用小目标的上下文信息。
• 提出密集嵌套交互模块和通道空间注意力模块,实现渐进式特征融合和自适应特征增强。
• 我们开发了一个红外小目标数据集(即NUDT-SIRST)。据我们所知,我们的数据集是最大的数据集,具有多种类别的目标形状、各种目标大小、不同的杂波背景和地面实况注释。
• 在公共数据集和我们的 NUDT 数据集上的实验证明了我们方法的卓越性能。与现有方法相比,我们的方法对杂波背景、目标大小和目标形状的变化更具鲁棒性。
Method
A. 整体架构
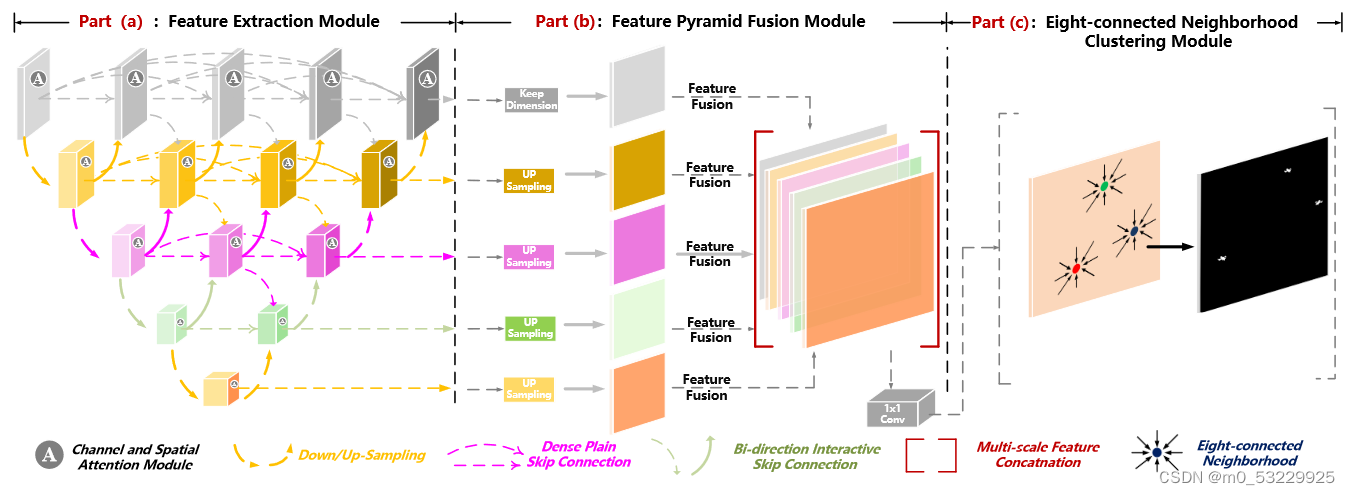
所提出的密集嵌套注意力网络(DNA-Net)的结构图。分为三部分:
(a) 特征提取模块。输入图像首先被馈送到密集嵌套交互模块 (DNIM) 中,以聚合来自多个尺度的信息。请注意,来自不同语义级别的特征通过通道和空间注意力模块 (CSAM) 自适应增强。
(b) 特征金字塔融合模块(FPFM)。增强功能经过上采样和串联,以实现多层输出融合。
(c) 八连邻聚类算法。对分割图进行聚类以确定每个目标区域的质心。
B.特征提取模块
1)动机
传统的U形结构[25]由编码器、解码器和普通跳跃连接组成。编码器用于扩大感受野
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6617
6617

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









