







文章目录
前言
瑞芯微 PWM 控制器驱动源码:/kernel/drivers/pwm/pwm-rockchip.c
目前主流的 pwm 设备驱动都是集成到 sysfs 文件系统中,通过 cat 和 echo 操作来控制,我接到的任务也是这样。
所以编写 pwm 设备驱动的核心就是完成 sysfs 操作集,通过 sysfs 来操作脉冲宽度。
PWM的原理是通过调整周期性波形的高电平时间宽度,从而改变有效信号的占空比,实现对设备的供电控制。
Linux内核支持PWM驱动框架,该驱动框架采用结构体数据类型对PWM控制器和PWM信号进行了抽象,提供了PWM驱动框架核心代码和sysfs接口代码。PWM驱动开发者可以方便地利用该驱动框架,添加特定PWM控制器的驱动程序,并使用sysfs接口进行功能调试。
PWM驱动框架头文件:kernel/include/linux/pwm.h
PWM驱动框架核心代码:kernel/drivers/pwm/core.c
PWM驱动框架sysfs接口代码:kernel/drivers/pwm/sysfs.c
一、PWM 驱动框架
数据结构
pwm_chip 表示一个 PWM 控制器。
struct pwm_chip {
struct device *dev;
struct list_head list; // 链表
const struct pwm_ops *ops; // PWM的操作函数
int base; // 索引号
unsigned int npwm; // 一个PWM控制器下有几路PWM
struct pwm_device *pwms; // PWM设备
struct pwm_device * (*of_xlate)(struct pwm_chip *pc,
const struct of_phandle_args *args);
unsigned int of_pwm_n_cells; // 参数
bool can_sleep; // 是否可以睡眠
......
};
PWM 设备操作集
struct pwm_ops {
int (*request)(struct pwm_chip *chip,
struct pwm_device *pwm); //申请PWM设备
void (*free)(struct pwm_chip *chip,
struct pwm_device *pwm); //释放PWM设备
int (*config)(struct pwm_chip *chip, //PWM设备配置函数
struct pwm_device *pwm,
int duty_ns, int period_ns);
int (*set_polarity)(struct pwm_chip *chip, //设置PWM输出极性
struct pwm_device *pwm,
enum pwm_polarity polarity);
int (*enable)(struct pwm_chip *chip,
struct pwm_device *pwm); //PWM开启
void (*disable)(struct pwm_chip *chip,
struct pwm_device *pwm); //PWM关闭
#ifdef CONFIG_DEBUG_FS
void (*dbg_show)(struct pwm_chip *chip,
struct seq_file *s); //开启DEBUG_FS的时候用到
#endif
struct module *owner;
};
struct pwm_ops结构体,包括PWM控制器的操作函数。其中应该由驱动开发者实现的2个基础函数为apply函数和get_state函数;apply函数用于配置PWM控制器,包括配置PWM信号的使能状态、周期、占空比、极性等;get_state函数用于在注册PWM控制器时获取指定PWM通道信号的初始状态,包括使能状态、周期、占空比、极性等。
重点需要实现 config、enable 和 disable 函数,其他函数可以不实现。
struct pwm_device结构体,表示PWM控制器输出的PWM信号
struct pwm_device {
const char *label;
unsigned long flags;
unsigned int hwpwm;
unsigned int pwm;
struct pwm_chip *chip;
void *chip_data;
struct pwm_args args;
struct pwm_state state;
struct pwm_state last;
};
框架核心函数
int pwmchip_add(struct pwm_chip *chip);
功能:注册一个 pwm 控制器设备
void pwmchip_remove(struct pwm_chip *chip);
功能:移除一个PWM控制器设备
PWM驱动典型实现方法
PWM驱动源文件位于./drivers/pwm路径下,需要驱动开发者添加相应的源文件即可,源文件设计可参考其他厂家的驱动代码。参考原有代码的命名风格,可以将新添加的驱动源文件命名为pwm-xx.c,将probe和remove函数分别命名为xx_pwm_probe和xx_pwm_remove,将PWM控制器结构体定义为struct xx_pwm_chip。
kernel/drivers/pwm路径下文件如下:

- apply函数和get_state函数定义
根据PWM控制器手册,由驱动开发者定义apply函数和get_state函数。
- xx_pwm_probe函数定义
xx_pwm_probe函数的实现方法为:首先对PWM控制器结构体struct xx_pwm_chip变量进行初始化,然后调用PWM驱动框架核心函数pwmchip_add注册一个新的PWM控制器设备。
- xx_pwm_remove函数定义
xx_pwm_remove函数的实现方法为:调用PWM驱动框架核心函数pwmchip_remove移除一个PWM控制器设备。
客户主要 API
获取函数:
devm_pwm_get() //从指定设备(dev)的DTS节点中,获得对应的PWM句柄
pwm_get() //从指定设备(dev)的DTS节点中,获得对应的PWM句柄
pwm_put() //释放 PWM 设备句柄
/* 与 pwm_get() 类似,区别是可以指定需要从中解析PWM信息的device node,而不是直接指定device指针 */
of_pwm_get()
devm_of_pwm_get()
状态函数:
pwm_init_state() //初始化当前 PWM 设备状态
pwm_get_state() //获取当前 PWM 设备状态
pwm_apply_state() //应用到当前 PWM 设备状态
配置函数:
//配置 PWM 设备周期和占空比,主要是将PWM的周期和PWM的高电平时间写入寄存器
/* chip : PWM控制器
pwm :PWM设备
duty_ns : 高电平的周期
period_ns : PWM周期
*/
static inline int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns);
static inline int pwm_enable(struct pwm_device *pwm); //开始 PWM 信号输出
static inline void pwm_disable(struct pwm_device *pwm); //停止 PWM 信号输出
//设置pwm信号的极性,可选参数包括normal(PWM_POLARITY_NORMAL)和inversed(极性翻转,PWM_POLARITY_INVERSED)
static inline int pwm_set_polarity(struct pwm_device *pwm, enum pwm_polarity polarity);
二、实例:PWM 温控风扇驱动
风扇模块如下所示,黑线是负,红线是正,黄线是测速,蓝线是温控。

原理图分析
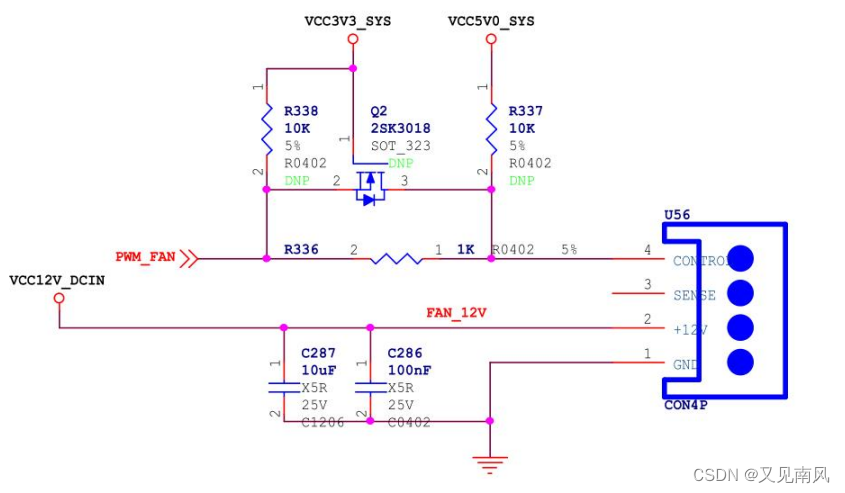
可以看出,通过控制 PWM_FAN 引脚的电平来控制风扇的转速。
继续在底板原理图上查找 PWM_FAN 引脚,PWM_FAN 引脚连接到核心板连接器 CON3 57 脚。
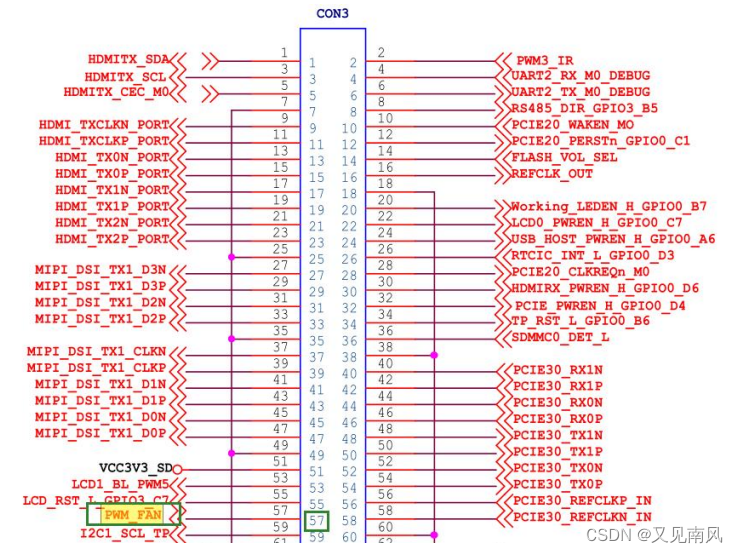
接下来我们打开核心板原理图,找到核心板连接器的 CON3 57 脚,如下:
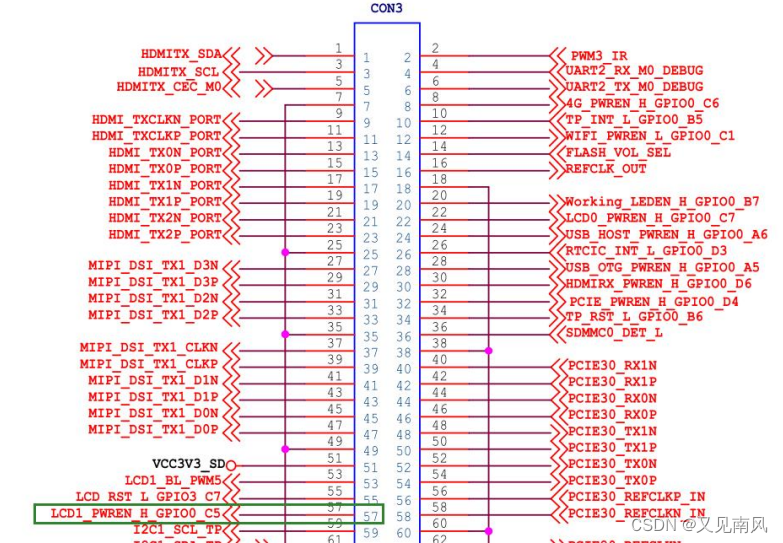
继续在核心板原理图上查找 LCD1_PWREN_H_GPIO0_C5 引脚,如下图所示:

由上图可知,LCD1_PWREN_H_GPIO0_C5 有多个复用功能,可以作为
GPIO0_C5,PCIE30X2_WAKEn_M0,SPI0_MISO_M0,PWM6。
这里要将此引脚复用为 pwm 功能。
设备树
参考内核文档:kernel/Documentation/devicetree/bindings/pwm/pwm-rockchip.txt
参考内核文档:kernel/Documentation/devicetree/bindings/pwm/pwm-fan.txt
/* 增加风扇节点 */
fan: pwm-fan {
compatible = "pwm-fan";
cooling-min-state = <0>; //最小条件状态
cooling-max-state = <3>; //最大条件状态
#cooling-cells = <2>;
pwms = <&pwm6 0 10000 0>;
cooling-levels = <100 150 200 250>; //cooling-levels : PWM duty周期值,0 - 255,与 thermal 的 cooling states 有关;
};
/* 在 pinctrl 节点中设置管脚复用为 PWM 功能 */
&pinctrl {
......
pwm6 {
/omit-if-no-ref/
pwm6_pins: pwm6-pins {
rockchip,pins =
/* pwm6 */
<0 RK_PC5 1 &pcfg_pull_none>; // GPIO0_C5 管脚复用 PWM 输出
};
};
......
};
&pwm6 {
status = "okay"; //使能 PWM6 控制器
};
/* 厂商提供的原生设备树,不能改 */
pwm6: pwm@fe6e0020 {
compatible = "rockchip,rk3568-pwm", "rockchip,rk3328-pwm";
reg = <0x0 0xfe6e0020 0x0 0x10>;
#pwm-cells = <3>;
pinctrl-names = "active";
pinctrl-0 = <&pwm6_pins>;
clocks = <&cru CLK_PWM1>, <&cru PCLK_PWM1>;
clock-names = "pwm", "pclk";
status = "disabled";
};
pwm属性的配置方法在 LCD 驱动篇章中讲过,如下:
pwms = <&pwm6 0 10000 0>;
- &pwm6,对DTS中 pwm 节点的引用;
- 0,pwm device的设备号,具体需要参考SOC以及pwm driver的实际情况;
- 10000,PWM信号默认的周期,单位是纳秒(ns);
- PWM_POLARITY_INVERTED,可选字段,是否提供由pwm
driver决定,表示pwm信号的极性,若为0,则正常极性,若为PWM_POLARITY_INVERTED,则反转极性。
编写驱动
数据结构
#define MAX_PWM 255
struct pwm_fan_ctx {
struct mutex lock;
struct pwm_device *pwm; // PWM 设备
unsigned int pwm_value; // PWM 的具体值(0~255)
unsigned int pwm_fan_state; // PWM 当前脉冲宽度的条件值
unsigned int pwm_fan_max_state; // PWM 脉冲宽度最大的条件值
unsigned int *pwm_fan_cooling_levels; // PWM duty周期值,简单点可以理解为脉冲宽度
struct thermal_cooling_device *cdev; // 温度模块在 dev 的目录
};
业务函数
/* 设置 PWM 的具体值 */
static int __set_pwm(struct pwm_fan_ctx *ctx, unsigned long pwm)
{
unsigned long period;
int ret = 0;
struct pwm_state state = { };
mutex_lock(&ctx->lock);
if (ctx->pwm_value == pwm)
goto exit_set_pwm_err;
pwm_init_state(ctx->pwm, &state); //将改状态值初始化到PWM设备
period = ctx->pwm->args.period; //获取周期值
state.duty_cycle = DIV_ROUND_UP(pwm * (period - 1), MAX_PWM); //DIV_ROUND_UP宏(向上取整)
state.enabled = pwm ? true : false;
ret = pwm_apply_state(ctx->pwm, &state); //将状态应用到 pwm 设备
if (!ret)
ctx->pwm_value = pwm;
exit_set_pwm_err:
mutex_unlock(&ctx->lock);
return ret;
}
/* 更新风扇设备的状态值 */
static void pwm_fan_update_state(struct pwm_fan_ctx *ctx, unsigned long pwm)
{
int i;
for (i = 0; i < ctx->pwm_fan_max_state; ++i)
if (pwm < ctx->pwm_fan_cooling_levels[i + 1])
break;
ctx->pwm_fan_state = i;
}
sysfs 操作集
/* 设置 pwm 设备的脉冲宽度 */
static ssize_t set_pwm(struct device *dev, struct device_attribute *attr,
const char *buf, size_t count)
{
struct pwm_fan_ctx *ctx = dev_get_drvdata(dev);
unsigned long pwm;
int ret;
//将字符串转换为unsigned long类型的数字,数字无效或者 pwm 数值超过最大值就报错
if (kstrtoul(buf, 10, &pwm) || pwm > MAX_PWM)
return -EINVAL;
ret = __set_pwm(ctx, pwm); //讲具体的 pwm 值设置到 pwm 设备中
if (ret)
return ret;
pwm_fan_update_state(ctx, pwm); //更新风扇设备的状态值
return count;
}
static ssize_t show_pwm(struct device *dev,
struct device_attribute *attr, char *buf)
{
struct pwm_fan_ctx *ctx = dev_get_drvdata(dev);
return sprintf(buf, "%u\n", ctx->pwm_value);
}
static SENSOR_DEVICE_ATTR(pwm1, S_IRUGO | S_IWUSR, show_pwm, set_pwm, 0);
static struct attribute *pwm_fan_attrs[] = {
&sensor_dev_attr_pwm1.dev_attr.attr,
NULL,
};
ATTRIBUTE_GROUPS(pwm_fan);
内核温度模块操作集
/* 获取 pwm 脉冲宽度最大值 */
static int pwm_fan_get_max_state(struct thermal_cooling_device *cdev, unsigned long *state)
{
struct pwm_fan_ctx *ctx = cdev->devdata;
if (!ctx)
return -EINVAL;
*state = ctx->pwm_fan_max_state;
return 0;
}
/* 获取当前 pwm 脉冲宽度的值 */
static int pwm_fan_get_cur_state(struct thermal_cooling_device *cdev,
unsigned long *state)
{
struct pwm_fan_ctx *ctx = cdev->devdata;
if (!ctx)
return -EINVAL;
*state = ctx->pwm_fan_state;
return 0;
}
/* 设置当前 pwm 的值 */
static int pwm_fan_set_cur_state(struct thermal_cooling_device *cdev, unsigned long state)
{
struct pwm_fan_ctx *ctx = cdev->devdata;
int ret;
if (!ctx || (state > ctx->pwm_fan_max_state))
return -EINVAL;
if (state == ctx->pwm_fan_state)
return 0;
ret = __set_pwm(ctx, ctx->pwm_fan_cooling_levels[state]);
if (ret) {
dev_err(&cdev->device, "Cannot set pwm!\n");
return ret;
}
ctx->pwm_fan_state = state;
return ret;
}
/* thermal 使用的操作接口,对 ctx->pwm_fan_state 进行读写操作 */
static const struct thermal_cooling_device_ops pwm_fan_cooling_ops = {
.get_max_state = pwm_fan_get_max_state,
.get_cur_state = pwm_fan_get_cur_state,
.set_cur_state = pwm_fan_set_cur_state,
};
温度模块操作集 pwm_fan_cooling_ops 通过 cdev 的方式注册。
参考资料:
Thermal 框架:https://blog.csdn.net/weixin_40237571/article/details/111953849
Thermal 模块:https://www.cnblogs.com/hellokitty2/p/15600099.html
获取设备树数据
static int pwm_fan_of_get_cooling_data(struct device *dev, struct pwm_fan_ctx *ctx)
{
struct device_node *np = dev->of_node;
int num, i, ret;
if (!of_find_property(np, "cooling-levels", NULL))
return 0;
ret = of_property_count_u32_elems(np, "cooling-levels");
if (ret <= 0) {
dev_err(dev, "Wrong data!\n");
return ret ? : -EINVAL;
}
num = ret;
ctx->pwm_fan_cooling_levels = devm_kcalloc(dev, num, sizeof(u32),
GFP_KERNEL);
if (!ctx->pwm_fan_cooling_levels)
return -ENOMEM;
ret = of_property_read_u32_array(np, "cooling-levels",
ctx->pwm_fan_cooling_levels, num);
if (ret) {
dev_err(dev, "Property 'cooling-levels' cannot be read!\n");
return ret;
}
for (i = 0; i < num; i++) {
if (ctx->pwm_fan_cooling_levels[i] > MAX_PWM) {
dev_err(dev, "PWM fan state[%d]:%d > %d\n", i,
ctx->pwm_fan_cooling_levels[i], MAX_PWM);
return -EINVAL;
}
}
ctx->pwm_fan_max_state = num - 1;
return 0;
}
电源管理操作集
#ifdef CONFIG_PM_SLEEP
static int pwm_fan_suspend(struct device *dev)
{
struct pwm_fan_ctx *ctx = dev_get_drvdata(dev);
struct pwm_args args;
int ret;
pwm_get_args(ctx->pwm, &args);
if (ctx->pwm_value) {
ret = pwm_config(ctx->pwm, 0, args.period); //把输出占空比跳到0
if (ret < 0)
return ret;
pwm_disable(ctx->pwm); //关了
}
return 0;
}
static int pwm_fan_resume(struct device *dev)
{
struct pwm_fan_ctx *ctx = dev_get_drvdata(dev);
struct pwm_args pargs;
unsigned long duty;
int ret;
if (ctx->pwm_value == 0)
return 0;
pwm_get_args(ctx->pwm, &pargs);
duty = DIV_ROUND_UP_ULL(ctx->pwm_value * (pargs.period - 1), MAX_PWM); //设置周期值和占空比,直接开满
ret = pwm_config(ctx->pwm, duty, pargs.period);
if (ret)
return ret;
return pwm_enable(ctx->pwm); //开风扇
}
#endif
//这部分注册后交给操作系统自己去调用
static SIMPLE_DEV_PM_OPS(pwm_fan_pm, pwm_fan_suspend, pwm_fan_resume);
probe 函数
static int pwm_fan_probe(struct platform_device *pdev)
{
struct thermal_cooling_device *cdev;
struct pwm_fan_ctx *ctx;
struct device *hwmon;
int ret;
struct pwm_state state = { };
ctx = devm_kzalloc(&pdev->dev, sizeof(*ctx), GFP_KERNEL);
if (!ctx)
return -ENOMEM;
mutex_init(&ctx->lock);
// 获取设备树中指定的 PWM 节点
ctx->pwm = devm_of_pwm_get(&pdev->dev, pdev->dev.of_node, NULL);
if (IS_ERR(ctx->pwm)) {
ret = PTR_ERR(ctx->pwm);
if (ret != -EPROBE_DEFER)
dev_err(&pdev->dev, "Could not get PWM: %d\n", ret);
return ret;
}
platform_set_drvdata(pdev, ctx); // 设置驱动私有数据,以后可以通过 pdev 得到 ctx
ctx->pwm_value = MAX_PWM; // pwm 初始值,最大转速 255
/* Set duty cycle to maximum allowed and enable PWM output */
pwm_init_state(ctx->pwm, &state); // 根据 pwm 设备中的 args 参数设置 pwm 中的 state
state.duty_cycle = ctx->pwm->args.period - 1; // state 指向的是 pwm->state
state.enabled = true;
// 此函数会调用 pwm 的 apply函数, 进行寄存器配置,配置周期频率等
ret = pwm_apply_state(ctx->pwm, &state);
if (ret) {
dev_err(&pdev->dev, "Failed to configure PWM\n");
return ret;
}
// 注册 hwmon 设备,会在文件系统中 /sys/class/hwmon/ 生成文件
hwmon = devm_hwmon_device_register_with_groups(&pdev->dev, "pwmfan", ctx, pwm_fan_groups);
if (IS_ERR(hwmon)) {
dev_err(&pdev->dev, "Failed to register hwmon device\n");
ret = PTR_ERR(hwmon);
goto err_pwm_disable;
}
// 获取设备树中指定的 cooling-levels
ret = pwm_fan_of_get_cooling_data(&pdev->dev, ctx);
if (ret)
goto err_pwm_disable;
ctx->pwm_fan_state = ctx->pwm_fan_max_state; // 设置风扇为最大状态
if (IS_ENABLED(CONFIG_THERMAL)) {
// 注册风扇为 cooling device,后面可以与温度传感器结合,根据具体温度设置不同的转速状态
cdev = thermal_of_cooling_device_register(pdev->dev.of_node,
"pwm-fan", ctx,
&pwm_fan_cooling_ops); //thermal模块集注册
if (IS_ERR(cdev)) {
dev_err(&pdev->dev, "Failed to register pwm-fan as cooling device");
ret = PTR_ERR(cdev);
goto err_pwm_disable;
}
ctx->cdev = cdev;
thermal_cdev_update(cdev); //由Governor调用进行cooling device设置,遍历 cooling 值后选择最大的设置,然后降温
}
printk("done success\n");
return 0;
err_pwm_disable:
state.enabled = false; //关风扇
pwm_apply_state(ctx->pwm, &state);
return ret;
}
完善驱动注册
static int pwm_fan_remove(struct platform_device *pdev)
{
struct pwm_fan_ctx *ctx = platform_get_drvdata(pdev);
thermal_cooling_device_unregister(ctx->cdev);
if (ctx->pwm_value)
pwm_disable(ctx->pwm);
return 0;
}
static const struct of_device_id of_pwm_fan_match[] = {
{ .compatible = "pwm-fan", },
{},
};
MODULE_DEVICE_TABLE(of, of_pwm_fan_match);
static struct platform_driver pwm_fan_driver = {
.probe = pwm_fan_probe,
.remove = pwm_fan_remove,
.driver = {
.name = "pwm-fan",
.pm = &pwm_fan_pm,
.of_match_table = of_pwm_fan_match,
},
};
module_platform_driver(pwm_fan_driver);
打开风扇本身只是简简单单接通电源的行为而已,通过 pwm 和温度控制主要还是为了保持主板各种芯片的正常运行,提高处理器的环境承受度上限。
例如我所在公司,客户要求设备的工作温度在 -40° ~ 80° 之间。
那么对于高温环境,就需要打开风扇来帮助主板上所有的芯片散热;低温的环境中就自动关闭风扇。
本章讲述的重点还是 pwm 驱动,前面说了,大多数 pwm 驱动的目的就为了让应用工程师在 sysfs 中操作脉冲宽度。
三、驱动添加到内核
将驱动源文件pwm-fan.c,添加到kernel/drivers/pwm路径下。
然后添加编译支持:
- 修改 kernel/drivers/pwm 路径下的 Makefile 文件,添加驱动选项。
# 新增gslx680驱动配置项
obj-$(CONFIG_PWM_FAN) += pwm_fan.o
CONFIG_PWM_FAN 是我个人写的名字,这个不限制,但是要记住这个宏,后面一直要用。
参考资料:https://blog.csdn.net/weixin_42031299/article/details/126562725
- 在Kbuild体系中添加配置项
# 新增 pwm_fan 驱动配置项
config CONFIG_PWM_FAN
tristate "Pwm Fan driver"
depends on PWM
help
This enables support for PWM_FAN over pwm based.
这个主要是在查找时出现配置信息。
- 在kernel/drivers/pwm 目录下的 Kconfig 文件中添加上面 pwm_fan 的配置项。
注意名字要和 pwm_fan 文件夹里Makefile使用的宏
CONFIG_PWM_FAN 对应,不能出错;
config CONFIG_PWM_FAN
bool "Rockchip PWM oneshot mode support"
depends on PWM_ROCKCHIP
help
Support Rockchip pwm fan.
depends on XXX,是这个模块需要的前置选项。例如,我们使用的是瑞芯微的 PWM 控制器,所以就需要先选上瑞芯微的 PWM 控制器驱动宏 PWM_ROCKCHIP。
其他的信息随便写。
- 添加完成后,就可以 make menuconfig 命令来配置 pwm_fan 驱动源码。
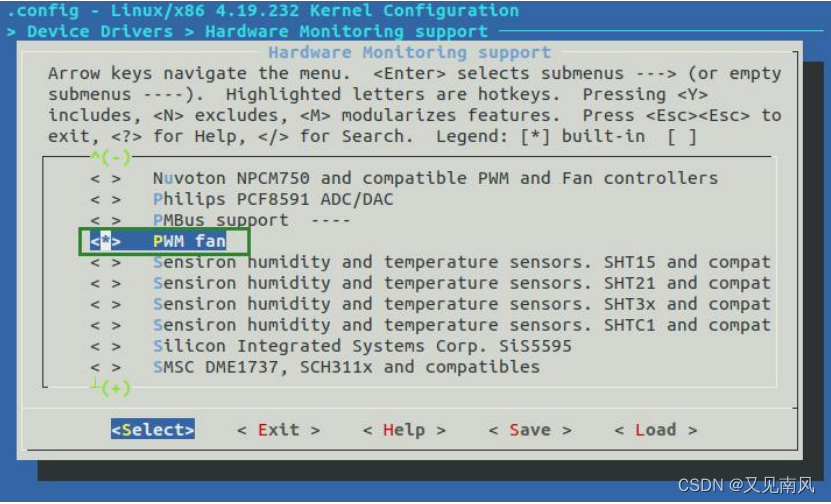
对Kbuild体系不熟悉的可参考博客:https://blog.csdn.net/weixin_42031299/article/details/120169613
保存退出之后,输入以下命令保存配置内核文件。
make savedefconfig
- 重新编译内核和设备树文件。
- 测试:
系统启动之后,可以查看对应目录,输入以下命令:
cd /sys/class/hwmon/hwmon1/

可以通过下列的操作调整风扇转速,我们可以写 0~250 之间的数字到文件 /sys/class/hwmon/hwmon1/pwm1 调节转速。
我们可以输入以下命令:
echo 200 > /sys/class/hwmon/hwmon1/pwm1
通过写入不同的值观察风扇的转速,如果有条件的话可以用示波器观察 pwm
波形改变。
打开 6 号 PWM 通道信号
echo 6 > /sys/class/pwm/pwmchip0/export
设置PWM信号周期
echo pvalue > /sys/class/pwm/pwmchip0/pwm6/period
设置PWM信号占空比
echo dvalue > /sys/class/pwm/pwmchip0/pwm6/duty_cycle
使能某个PWM通道信号
echo 1 > /sys/class/pwm/pwmchip0/pwm6/enable
禁止某个PWM通道信号
echo 0 > /sys/class/pwm/pwmchip0/pwm6/enable
打开风扇本身只是简简单单接通电源的行为而已,通过 pwm 和温度控制主要还是为了保持主板各种芯片的正常运行,提高处理器的环境承受度上限。
例如我所在公司,客户要求设备的工作温度在 -40° ~ 80° 之间。
那么对于高温环境,就需要打开风扇来帮助主板上所有的芯片散热;低温的环境中就自动关闭风扇。
本章讲述的重点还是 pwm 驱动,前面说了,大多数 pwm 驱动的目的就为了让应用工程师在 sysfs 中操作脉冲宽度。
参考资料:
定时器中断计算转速的部分:https://blog.csdn.net/u014443578/article/details/124325602
韦东山讲 PWM 应用:https://cloud.tencent.com/developer/article/2223398
PWM 框架:https://blog.csdn.net/yangguoyu8023/article/details/122251015















 1471
1471











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









