







2D图像几何变换的3×3矩阵:

图像常见的几何变换:
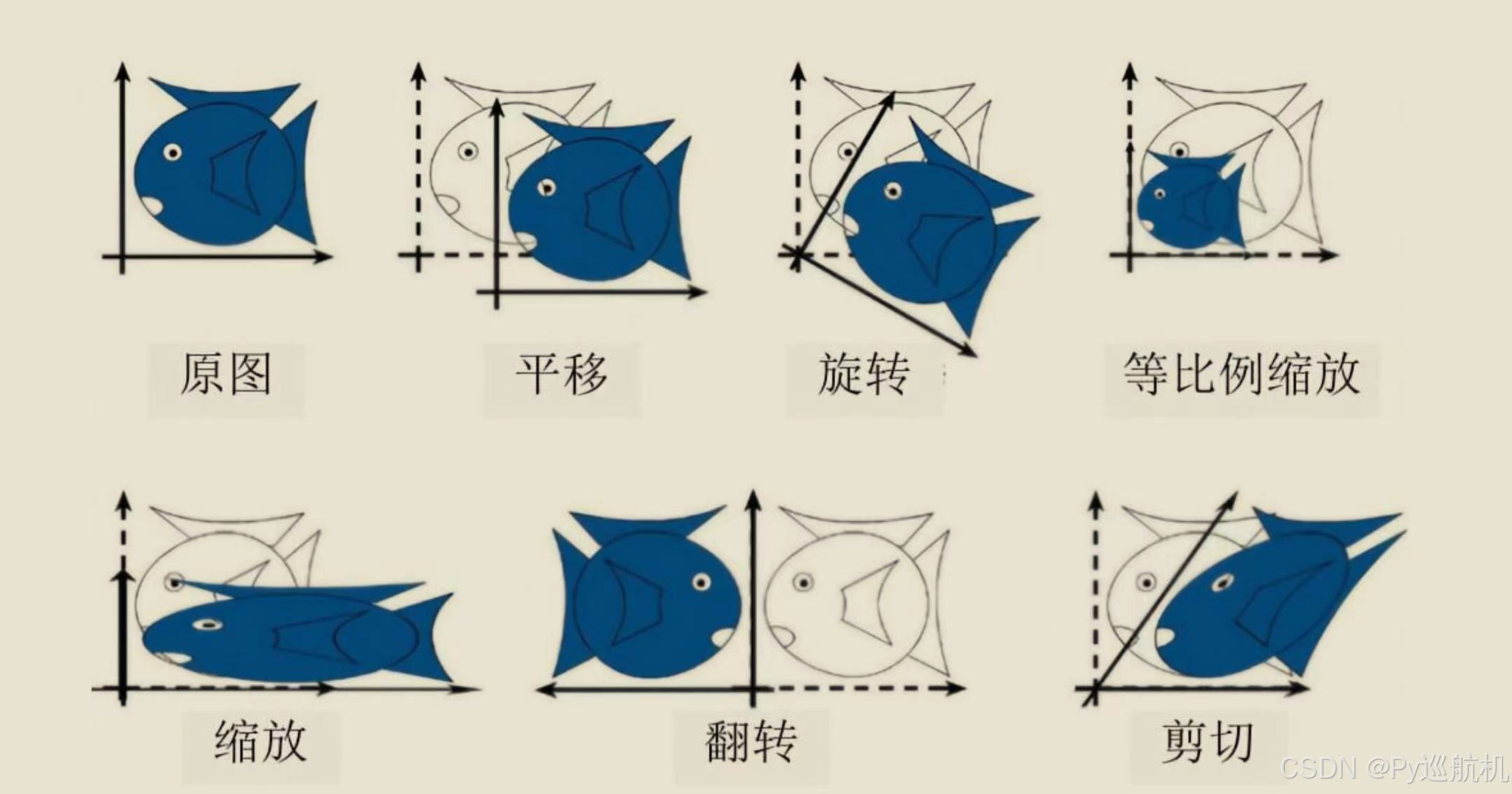
图像来源:《OpenCV 4.5计算机视觉开发实战:基于Python》作者:朱文伟 李建英;
1. 平移(Translation)
在OpenCV中,平移不是直接通过一个函数完成的,而是先通过创建一个平移矩阵,然后使用warpAffine函数应用这个矩阵。
cv2.getTranslationMatrix2D(center, offset, scale)
center:源图像中的变换中心。offset:沿x和y方向移动的距离。scale:通常设置为1.0,因为平移不涉及缩放。
返回的矩阵然后传递给warpAffine函数进行实际的平移操作。
2. 旋转(Rotation)
cv2.getRotationMatrix2D(center, angle, scale)
center:旋转中心。angle:旋转角度,以度为单位。正值表示逆时针旋转。scale:图像缩放比例。
这个函数返回一个2x3的旋转矩阵,该矩阵可以传递给warpAffine进行图像的旋转。
图像旋转后显示完整图像示例代码:
import cv2
import numpy as np
def rotate_image(image, angle):
# 获取图像尺寸
(h, w) = image.shape[:2]
# 计算图像中心
center = (w // 2, h // 2)
# 获取旋转矩阵(注意角度需要转换为弧度)
M = cv2.getRotationMatrix2D(center, angle, 1.0)
# 计算旋转后图像的边界框
cos = np.abs(M[0, 0])
sin = np.abs(M[0, 1])
nW = int((h * sin) + (w * cos))
nH = int((h * cos) + (w * sin))
# 调整旋转矩阵以考虑平移
M[0, 2] += (nW / 2) - center[0]
M[1, 2] += (nH / 2) - center[1]
# 执行旋转
rotated = cv2.warpAffine(image, M, (nW, nH))
return rotated
# 读取图像
image = cv2.imread('your_image.jpg')
# 旋转图像,例如旋转45度
rotated_image = rotate_image(image, 45)
# 显示原始和旋转后的图像
cv2.imshow("Original Image", image)
cv2.imshow("Rotated Image", rotated_image)
cv2.waitKey(0)
cv2.destroyAllWindows()3. 缩放(Resizing)
缩放通常使用resize函数,而不是通过几何变换矩阵。
cv2.resize(src, dsize, fx=0, fy=0, interpolation=cv2.INTER_LINEAR)
src:输入图像。dsize:输出图像的大小。这是一个宽度和高度的元组。如果它是零,则通过fx和fy计算大小。fx、fy:沿x轴和y轴的缩放比例。interpolation:插值方法,用于确定如何计算输出图像中的像素值。
4. 仿射变换(Affine Transformation)
仿射变换是一个更一般的变换,包括旋转、平移、缩放和倾斜。
cv2.warpAffine(src, M, dsize, flags=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT, borderValue=(0,0,0))
src:输入图像。M:2x3的变换矩阵。dsize:输出图像的大小。flags:插值方法。borderMode:边界像素模式。borderValue:当borderMode=cv2.BORDER_CONSTANT时,边界像素的值。
5. 透视变换(Perspective Transformation)
透视变换用于从一个视角转换到另一个视角,需要一个3x3的变换矩阵。
cv2.warpPerspective(src, M, dsize, flags=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT, borderValue=(0,0,0))
- 参数与
warpAffine相似,但M是一个3x3的透视变换矩阵。
6 图像金字塔(Image Pyramid)
在Python的OpenCV库中,图像金字塔(Image Pyramid)是一种用于图像多尺度表达的有效结构,主要用于图像特征检测、图像分割和图像压缩等领域。图像金字塔通过逐步减小图像的分辨率来创建一系列图像,这些图像以金字塔形状排列,层级越高,图像越小,分辨率越低。
OpenCV提供了两个主要的函数来实现图像金字塔的构建:cv2.pyrDown()和cv2.pyrUp()。
1. cv2.pyrDown(src[, dst[, dstsize[, borderType]]])
功能:对图像进行下采样(缩小),生成图像金字塔的下一层。
参数解释:
src:输入图像,即当前层的图像。dst:输出图像,即下采样后的图像。这是一个可选参数,如果提供,则输出图像会存储在这里。dstsize:输出图像的大小。如果此参数为0(默认值),则输出图像的尺寸将是输入图像尺寸的一半(宽度和高度都减半)。borderType:边界像素的插值方法。在大多数情况下,使用默认值cv2.BORDER_DEFAULT即可。
返回值:下采样后的图像。如果提供了dst参数,则函数返回None;否则,返回下采样后的图像。
2. cv2.pyrUp(src[, dst[, dstsize[, borderType]]])
功能:对图像进行上采样(放大),尝试从图像金字塔的下一层重建当前层。但需要注意的是,上采样并不是下采样的完全逆操作,因为上采样过程中会丢失一些信息,导致重建的图像比原始图像模糊。
参数解释:
src:输入图像,即金字塔下一层的图像。dst:输出图像,即上采样后的图像。这是一个可选参数,如果提供,则输出图像会存储在这里。dstsize:输出图像的大小。如果此参数为0(默认值),则输出图像的尺寸将是输入图像尺寸的两倍(宽度和高度都加倍)。但通常建议明确指定dstsize,以匹配原始图像的尺寸或所需的尺寸。borderType:边界像素的插值方法。在大多数情况下,使用默认值cv2.BORDER_DEFAULT即可。
返回值:上采样后的图像。如果提供了dst参数,则函数返回None;否则,返回上采样后的图像。
7 图像翻转(Flipping)
cv2.flip(src, flipCode)src:输入图像,即你想要翻转的图像。flipCode:指定翻转方向的标志。它是一个整数,决定了图像翻转的方式。- 当
flipCode为0时,表示沿x轴翻转(即上下翻转),实际上这并不会改变图像,因为x轴是水平的,而翻转通常是相对于垂直轴(y轴)或水平轴(但在这里不适用,因为x轴翻转在视觉上没有效果,除非你改变了坐标系统的解释)。但这里通常理解为参数设置错误或不适用于此上下文。 - 当
flipCode> 0时(通常是1),表示沿y轴翻转(即左右翻转)。 - 当
flipCode< 0时(通常是-1),表示沿x轴和y轴同时翻转(即上下左右翻转,相当于180度旋转)。
- 当
import cv2
# 读取图像
img = cv2.imread('your_image_path.jpg')
# 左右翻转图像
flipped_img_lr = cv2.flip(img, 1)
# 上下左右翻转图像(180度旋转)
flipped_img_udlr = cv2.flip(img, -1)
# 显示原图和翻转后的图像
cv2.imshow('Original Image', img)
cv2.imshow('Flipped Left-Right', flipped_img_lr)
cv2.imshow('Flipped Up-Down and Left-Right', flipped_img_udlr)
cv2.waitKey(0)
cv2.destroyAllWindows()8 极坐标变换(Polar Transformation)
极坐标变换通常需要将图像的笛卡尔坐标(x, y)转换为极坐标(ρ, θ)。在OpenCV中,没有直接的函数来完成这个转换,但你可以通过以下步骤实现:
-
计算每个像素的极坐标:这通常涉及到遍历图像的每个像素,并计算其对应的ρ和θ值。
-
重新映射到极坐标网格:由于极坐标网格在ρ=0附近是密集的,而在ρ较大时变得稀疏,因此你可能需要创建一个新的图像,其大小取决于你想要的ρ和θ的分辨率。
-
插值:将原图像中的像素值映射到新的极坐标网格时,可能需要进行插值,因为源像素和目标像素之间可能不会一一对应。
由于这个过程比较复杂,且OpenCV没有直接提供这样的函数,因此通常需要自己编写代码来实现。
9 逆极坐标变换(Inverse Polar Transformation)
逆极坐标变换是极坐标变换的逆过程,即将极坐标(ρ, θ)转换回笛卡尔坐标(x, y)。同样,OpenCV没有直接的函数来完成这个转换,但你可以通过以下步骤来近似实现:
-
确定目标图像的大小:这取决于你想要的输出图像的分辨率。
-
计算每个目标像素的笛卡尔坐标:这通常是通过遍历目标图像的每个像素,并将其(x, y)坐标计算出来。
-
转换到极坐标:将(x, y)坐标转换为(ρ, θ),以便你可以从原始极坐标图像中检索对应的像素值。
-
插值:由于极坐标和笛卡尔坐标之间的映射可能不是一一对应的,因此你可能需要使用插值方法来获取最终的像素值。















 203
203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









