







最近学习ros2,按照以下步骤创建工作空间
mkdir -p ws00_helloworld/src #创建工作空间以及子级目录 src,工作空间名称可以自定义
cd ws00_helloworld #进入工作空间
colcon build #编译终端下,进入ws00_helloworld/src目录,使用如下指令创建一个C++功能包:
ros2 pkg create pkg01_helloworld_cpp --build-type ament_cmake --dependencies rclcpp --node-name helloworld终端下进入到工作空间,执行如下指令:
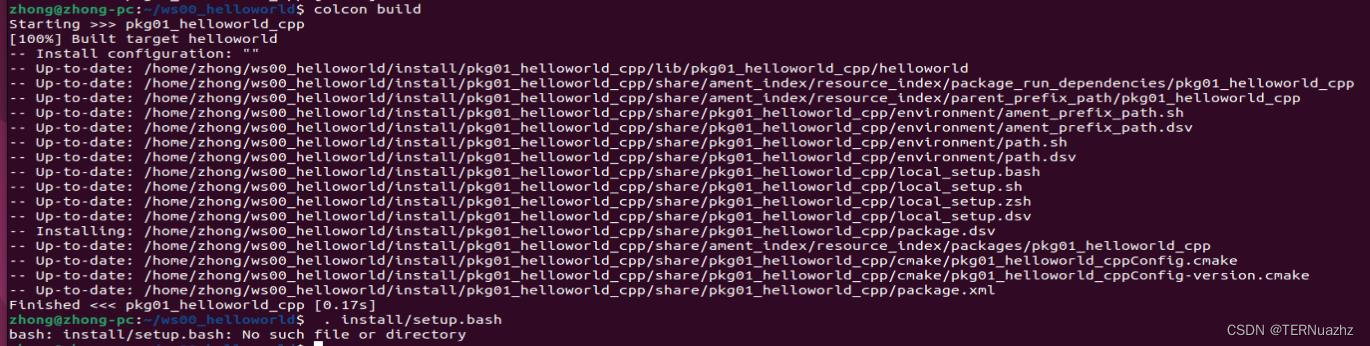
colcon build. install/setup.bash
ros2 run pkg01_helloworld_cpp helloworld程序执行,正常情况下,应该在终端下将输出文本:"hello world!"。
但是,运行后报错,没有setup.bash
以下是我创建的工作空间的install文件夹(编译后)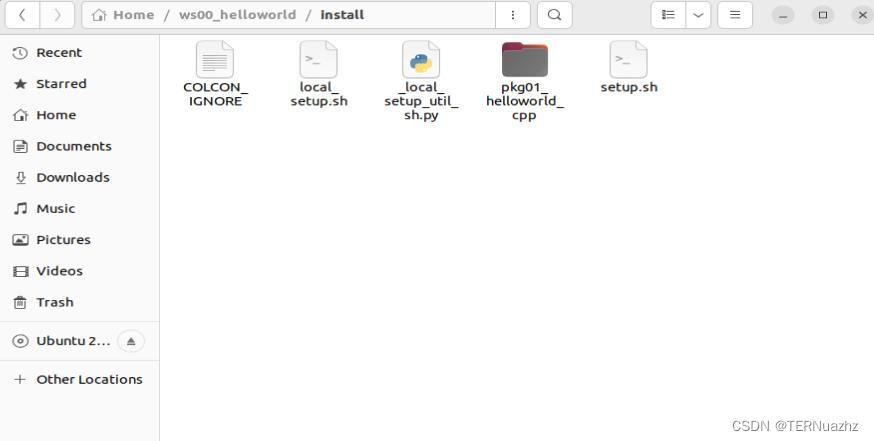
以下是教程创建工作空间后的install文件夹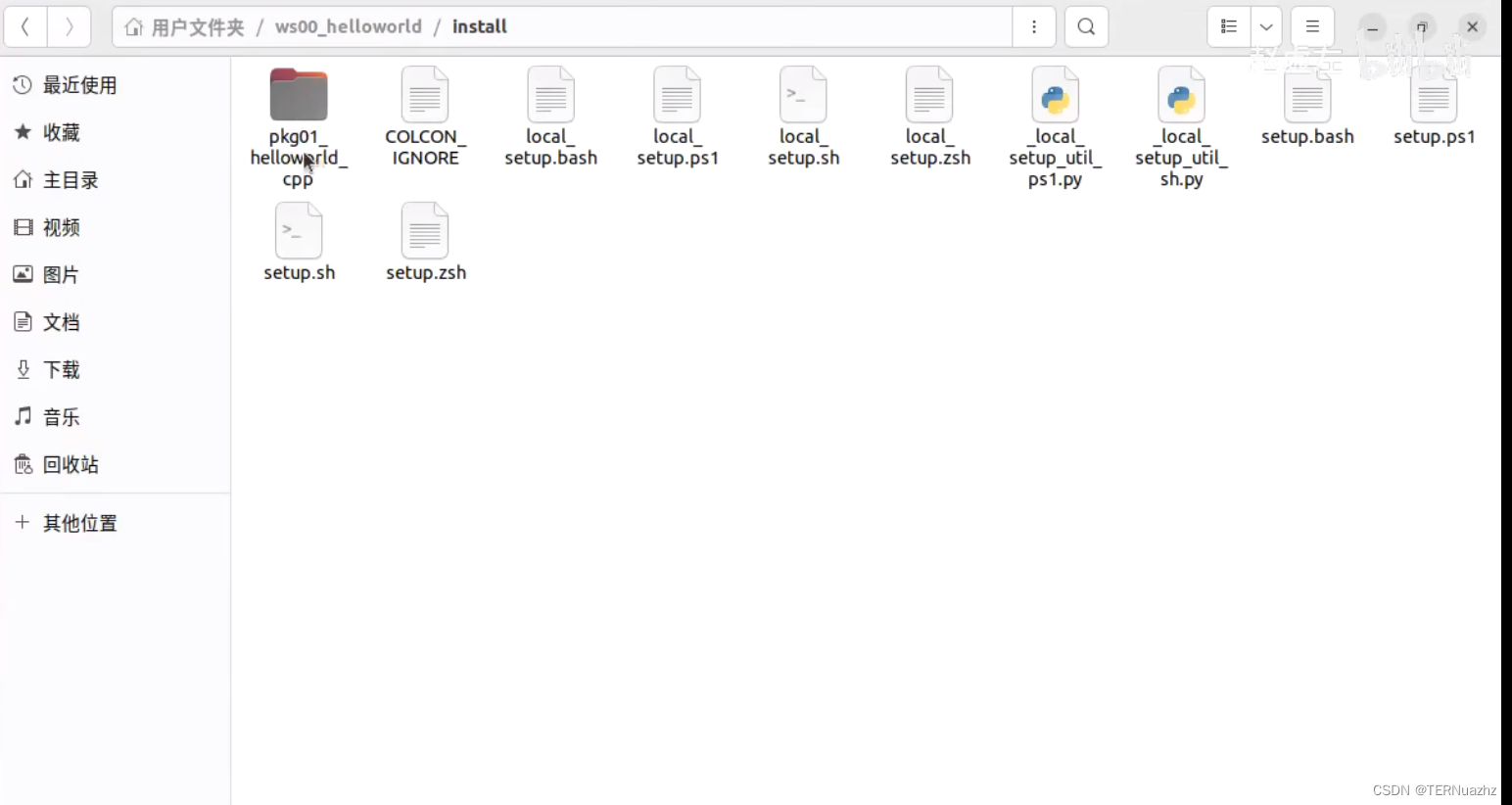
发现缺少了很多东西,
解决方法就是,我的ubuntu版本是22.04LTS,ros2 版本是humble.
指令应该用:
. install/local_setup.bash
就是setup.bash改为local_setup.sh
该步操作作用为刷新一遍环境变量
先暂时这么写,等到笔者学习深入了再加补充,欢迎大家评论区交流
--------------------------
ubuntu版本是22.04LTS,ros2 版本是humble.配置环境变量用以下方式:
$ source install/local_setup.sh # 仅在当前终端生效 $ echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc # 所有终端均生效
喜欢不同教程混看的初学者应注意


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









