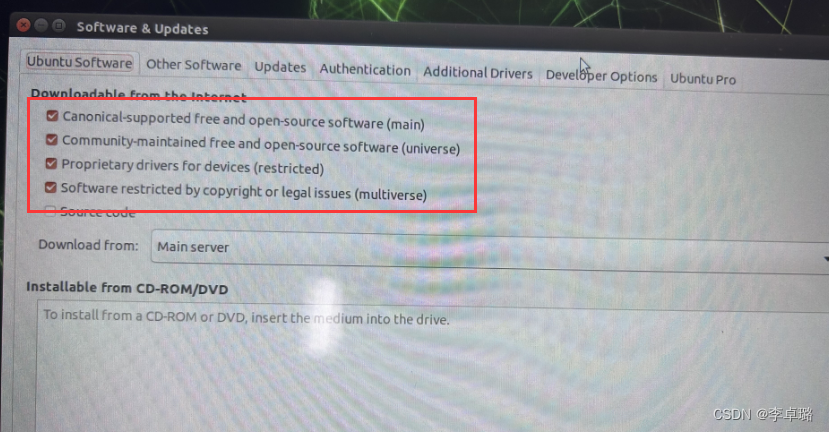
查阅Linux系统的Ubuntu版本号指令:cat /etc/issue ROS安装全流程 1.配置ubuntu的软件和更新;(这步其实系统默认选择不动就行。) 2.设置安装源; 官网默认安装源 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 9814
9814











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






