






问题点:
- 传统配准为ICP配准,由于L515的分辨率更高,点更多,使用ICP配准会导致计算时间长
- L515的刷新频率更高,导致传统的LIdar SLAM和LOAM的计算速度达不到实时的标准
提出了:
- 提出了一个用于固态激光雷达的轻量化slam框架,包含有特征提取,里程计估计,概率地图构建
- 提出了一种新的旋转不变特征提取方法,该方法利用了水平曲率和垂直曲率(loam用的是每一列的曲率)
贡献点:
- 基于固态激光雷达,提出了一种针对小视场角(FOV)以及高刷新率的SLAM方案
- 提出了一种在大旋转工况下仍能工作良好的特征提取方法,此方法使用左李导数用于迭代姿态估计,以便姿态以无奇异点的格式存储
Feature Extraction 特征提取部分:
- 基于测量距离,去除噪声点(什么是噪声点?),噪声点指的是,因为在极限测量距离的时候,由于反射率的问题,测量精度差,故提前去除这种可以通过测量距离在描述的噪声点
图为Realsense L515的测量示意图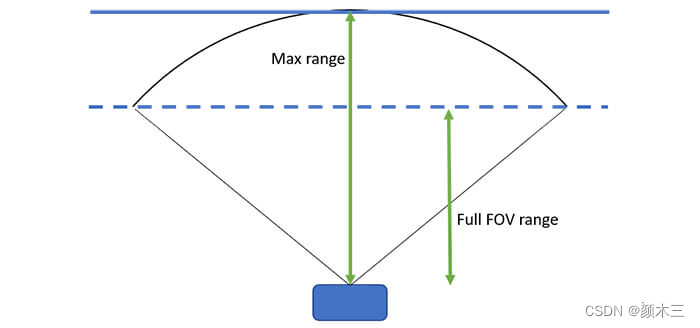
- 参考loam的scan和sweep思想,这里面对点云做区分的方式为:
但是我看L515的介绍,由于是振镜式扫描,如下图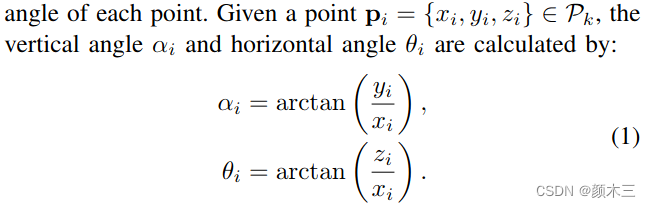
感觉应该不能那么区分吧?但是其分辨率又是0.7° x 0.7°(所以奇怪)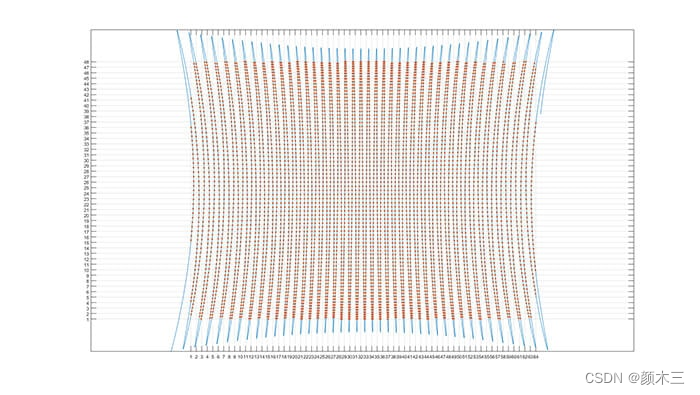
- 提到,通过找到所有单元格的几何中心点来计算平均测量值(?)
- 提出了描述平滑度的方式,用这种方式来判断是是边沿还是平面:
这里面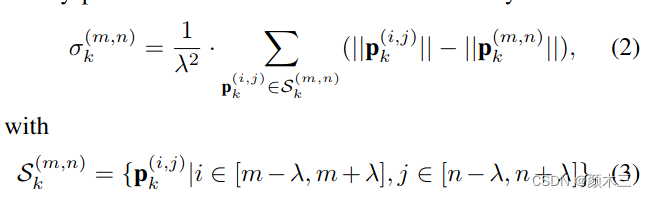
是搜索半径, k 我理解为第k帧(暂时), (m,n)为搜索的区域,(i,j)为区域内坐标
- 这个论文似乎没有使用imu信息,是使用地图信息来做位姿估计的.位姿估计的两种方法
- scan-to-scan,就是一帧一帧的匹配,速度更快,但是由于FOV小的原因,比较容易产生错误估计
- scan-to-map,帧对地图的匹配,文中使用的是这种方法,然后为了降低计算时间,使用滑动窗口的方式进行帧对地图的匹配.同时,使用提出取出来的特征地图(面和边缘特征)建立局部地图,取当前帧的前q帧建立局部地图
- 特征匹配的方法和LOAM基本一致,可能在scan的处理上有不同,因为扫描的方式不同
未完.....















 4677
4677

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









