







这俩天一起奋斗的牛马和自己家里有事,闲下来整理了下高压BLDC的方案,作为本科毕业从事电机半年多的小白是不能准确的从理论上对方案进行总结的。所以只能从工程角度进行记录 。
高速bldc之前只是在网上看了简单的介绍,阻尼系数啊,什么电流滞留啊,什么什么的。反正我是还没有时间去研究这个理论的东西。目前只是知道我采集的快,修正的准,能过滤掉异常的波形。他就应该实现。下面做工程记录 。
电机参数 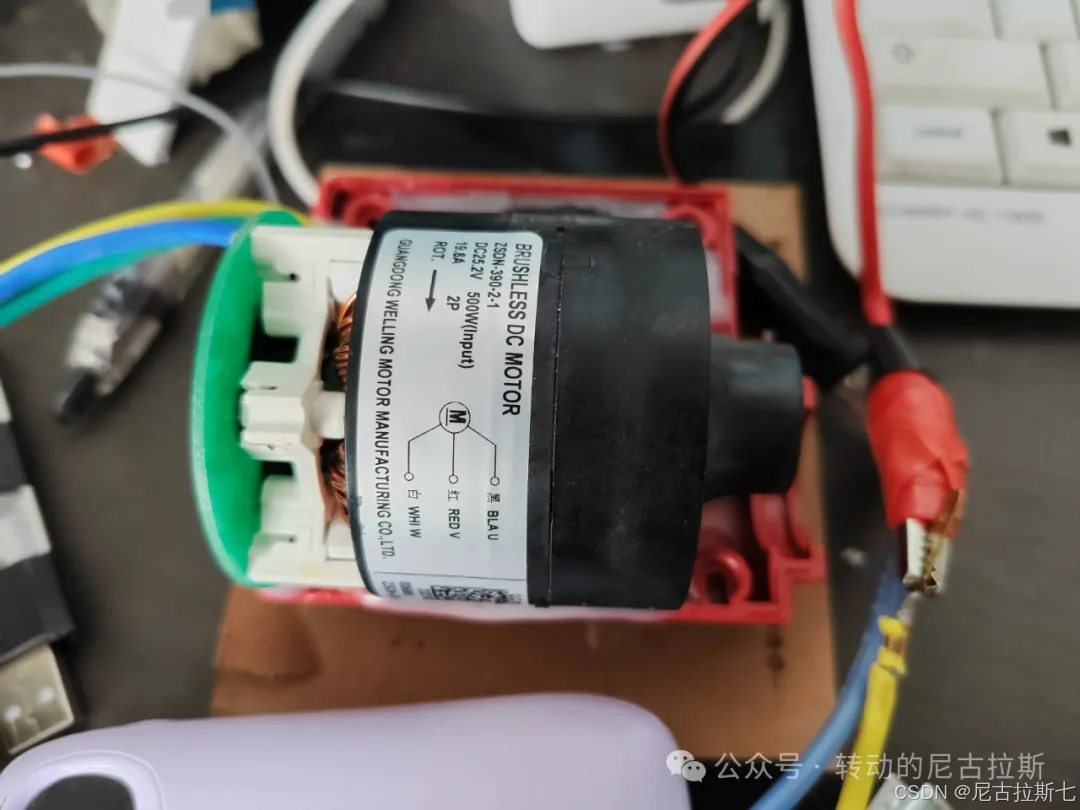
供电电压 :25.2V;2对级; 额定电流 19.8A ;额定功率500W ;
最高电角度转速转速 12W转;
验证环境
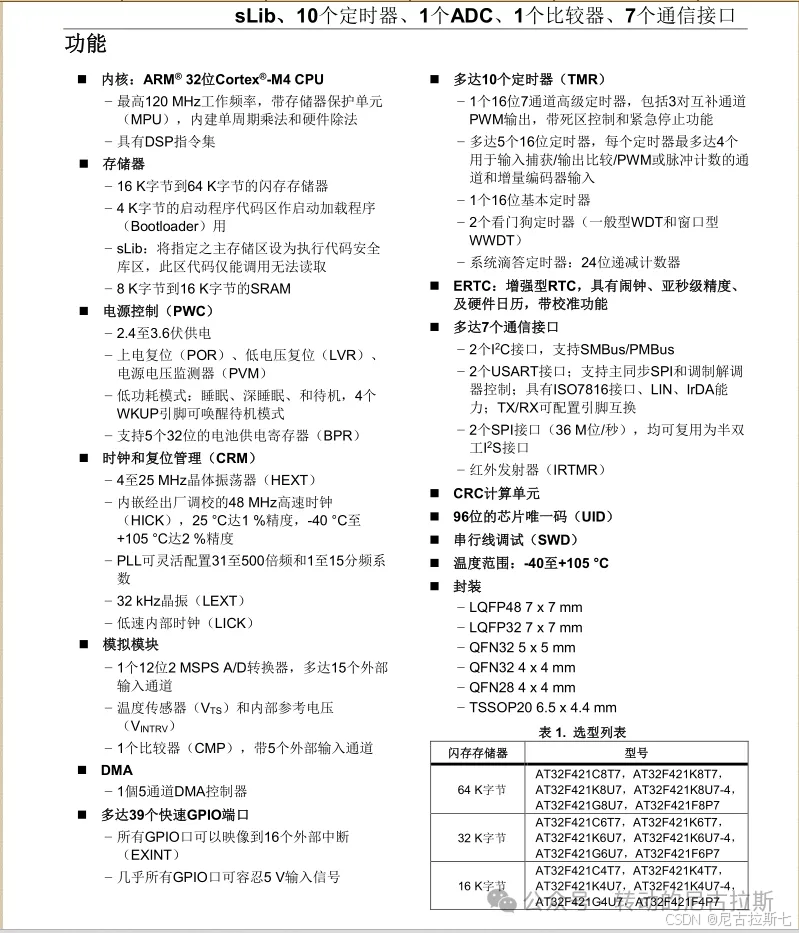
电机控制板主控芯片 AT32F21系列芯片,该芯片主频较高,对于高速BLDC算法部分的开销时间很小。重要的是,性价比高。他不贵,他不贵,他不贵。即使进行产品量产,对于工况环境比较极端的情况,也可以选择使用。这里的120M主频在同系列的芯片arm架构中性价比很有优势。后续如果考虑到降本,那就压缩过零换向算法,就目前我的算法架构来看,压缩到1/2时间开销是很可能得,。可以考虑主频50M左右的芯片 。
电路相关部分就是常规的BLDC控制电路。这里注意的点就是三相采集是否存在滤波,电流采集是否存在滤波。
三相采集的滤波会影响过零点的滞后,但是滤波电容不大都OK;
电流采集的滤波主要影响HFI定位这块,低压方案版的电流波动不大的,不加硬件滤波使用软件滤波效果一样的。
至于方向电动势采集的频率,这个就要围绕你的芯片特性和算法时间弄一个简单的算法。 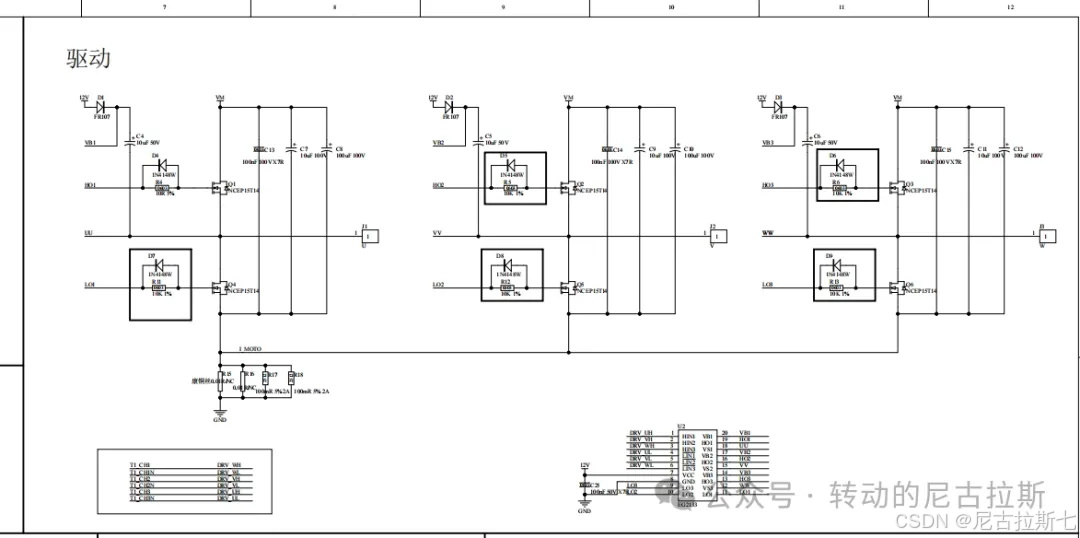
工程方法
实现高速BLDC,就要小误差采集到过零点实行换向。
1、比较器方案。比较器本身属于成本开销,在实际产品中是不太合适的,这种方法我也没有进行验证过。
2、提高pwm占空比。提高pwm占空比这个动作个人感觉要根据电机的性能和产品的性能综合的考虑。好比满载转速30Wrpm的电机,产品目标转速10W(当然,这里只是举例说明,从成本角度应该不会有人这么做),这个时候换向切换很快但是占空比又不大,假设30%的占空比就可以达到10Wrpm.那这个时候在pwm频率16.6K就会出现某一项的供电电压很低。这时候需要增大pwm占空比,随着转速的增加,pwm频率就可以适当的减小。极限思想:100%占空比pwm的频率可以无限接近于0 。
目前我使用的方法是尽量无视pwm频率,以相同采样宽度去采集反向电动势,实现在高速状态态下BLDC过零点的小误差检测。
这里因为我的电源问题(我电源穷)转速达到十一万左右电源输出能力就不足了。所以对于变频这部分测试可能要电源到达小康才能验证了。
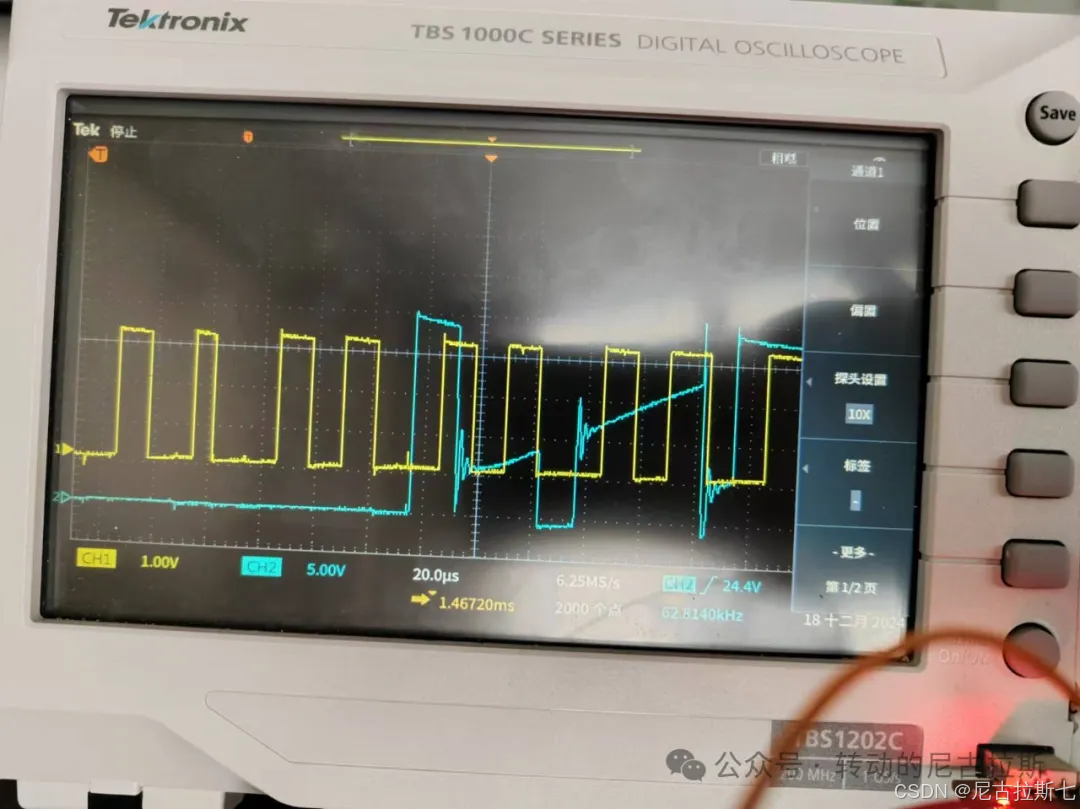
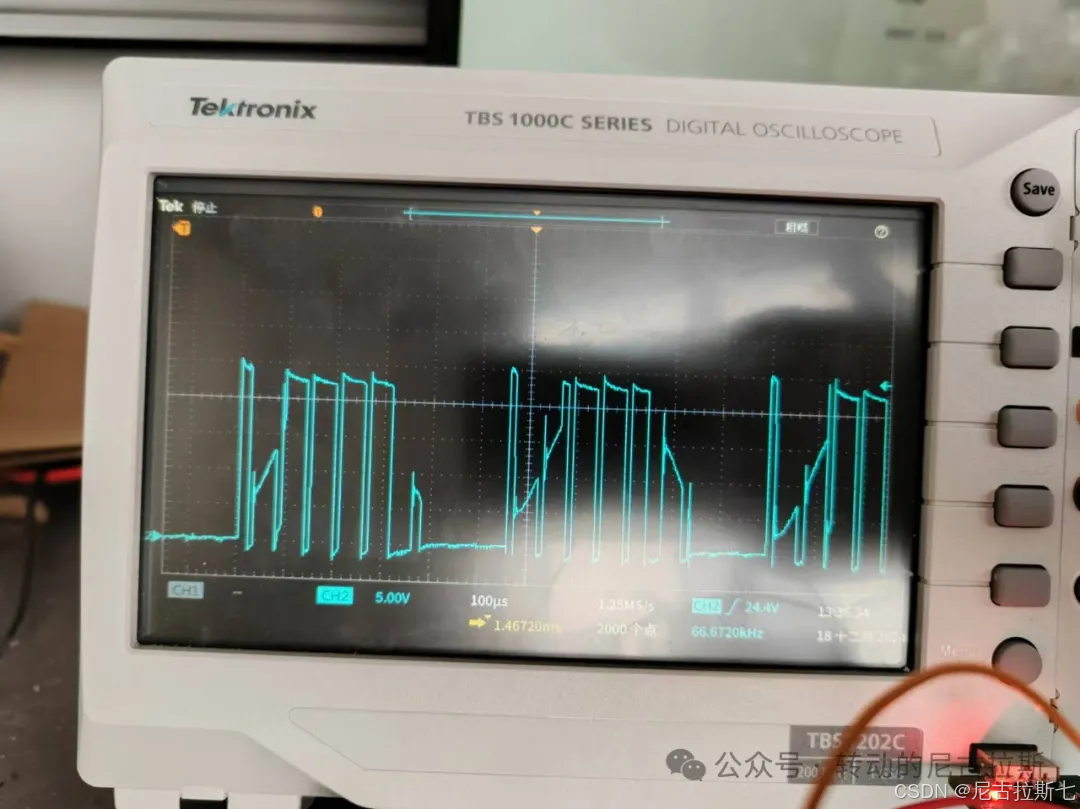
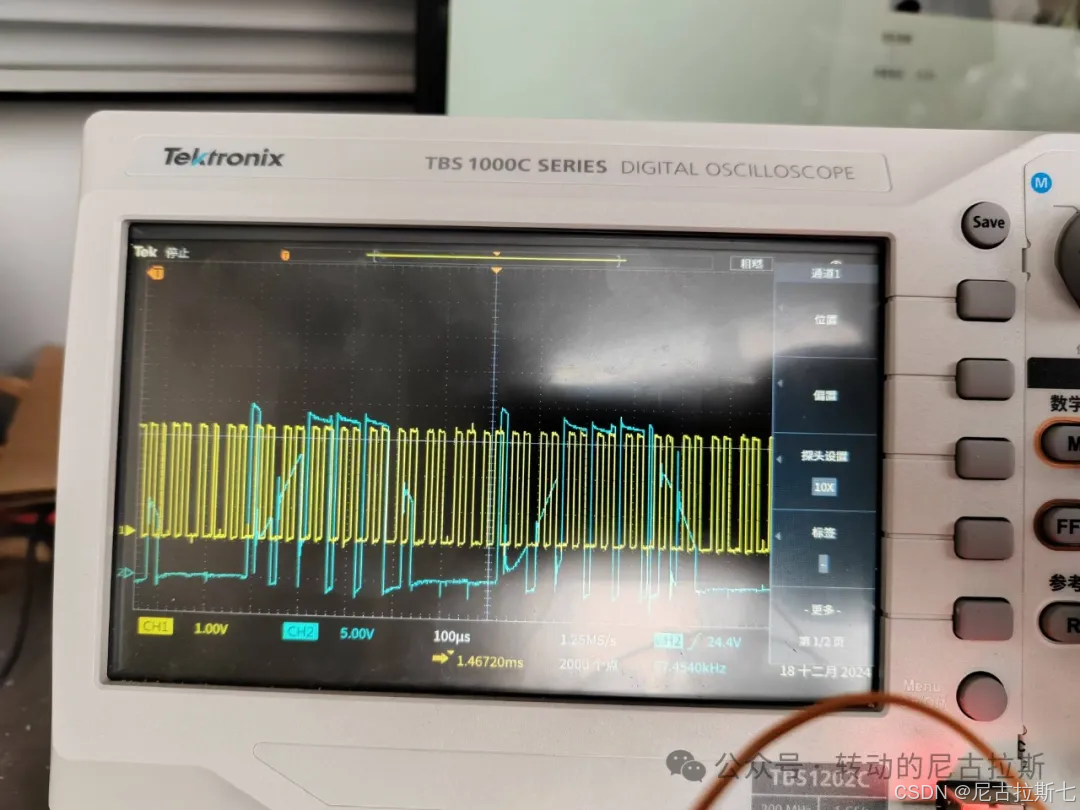
蓝色是反电动势波形
黄色是采样点波形,它是持续变化的(算法自己动的,但是固定住采集点也是可以的)。
总结
1、对芯片要有足够的了解,把芯片的资源用到极致,这样你主控成本才能更合理。
2、目前只是在验证版上进行验证,没有对标产品进行具体工况环境下测试。也是需要找到一个实际的产品进行验证 。
——有想法可以沟通,但是骂的时候轻一些。 


















 1946
1946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











