






 本文介绍了如何通过差分GPS技术减小GPS测量误差,利用基准站接收机的精确位置提供差分校正量,以及载波相位平滑方法来提高定位精度。同时讨论了这种方法的局限性,如电离层假设和初始偏差处理问题。
本文介绍了如何通过差分GPS技术减小GPS测量误差,利用基准站接收机的精确位置提供差分校正量,以及载波相位平滑方法来提高定位精度。同时讨论了这种方法的局限性,如电离层假设和初始偏差处理问题。
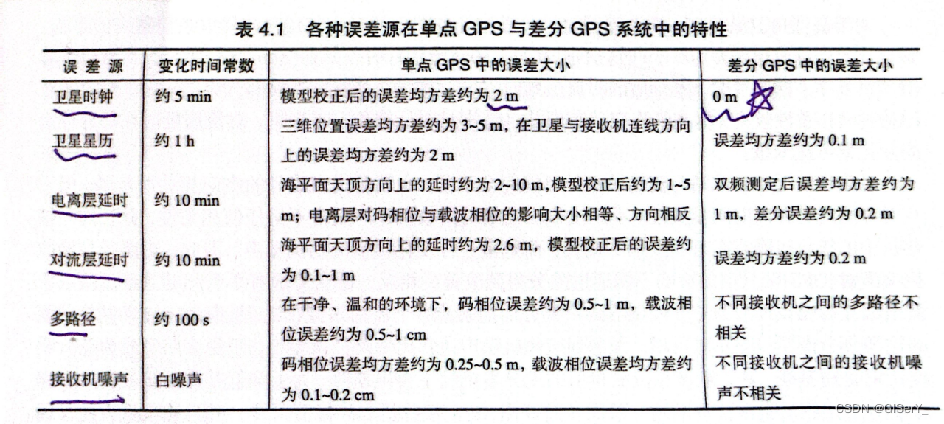
减小GPS测量误差是提高GPS定位精度的措施之一,而差分GPS (DGPS)是一种应用广泛并且又行之有效地降低甚至消除各种GPS测量误差的方法。
差分GPS的基本工作原理主要是:
依据卫星时钟误差、卫星星历误差 电离层延时与对流层延时所具有的空间相关性和时间相关性这一事实。对于处在同一地域内的不同接收机,它们的GPS测量值中所包含的上述4种误差成分近似相等或者高度相关。我们通常将其中的一个 接收机作为参考之用,并称该接收机所在地为基准站(或基站),而该接收机也就常称为基准站接收机。基准站接收机的位置是预先精确知道的,这样我们就可以准确计算从卫星到基准站接收机的真实几何距离。
如果我们将基准站接收机对卫星的距离测量值与这一真实几何距离相比较, 那么它们 两者的差异就等于基准站接收机对这一卫星的测量误差。由于在同一时刻、同地域内的其他接收机对同一卫星的距离测量值有相关或相近的误差,因而如图所示,如果基准站将其接收机的测量误差通过电波发射台播送给流动站(即用户)接收机,那么流动站就可以利用接收到的基准站接收机的测量误差来校正流动站接收机对同一卫星的距离测量值,从而提高流动站接收机的测量和定位的精度,这就是差分GPS的基本工作原理。
这种由基准站播发的、用来降低甚至消除流动站GPS测量误差的校正量称为差分校正量。

流动站与基准站之间的距离称为基线长度,局域差分系统的基线长度通常在20-100km之内。
载波相位平滑伪距: 平滑器公式:
![]()
psk称为在k时的载波相位平滑伪距;M称为平滑时间常数
缺点: 1.它假定了电离层延时保持不变; 2.如果平滑伪距初始值有一个较大的偏差,那平滑器需要一段较长时间的运行才能逐步消除此偏差;
周整模糊度估算:ρk≈λ(φk-N)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











