







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
随着科学技术的发展进步,武器系统受到越来越多的电子干扰威胁,而计算机仿真具有安全,高效,经济等特点,已成为目前及未来雷达与电子对抗领域研究中的重要手段.
⛄ 部分代码
clear all;
% close all;
clc;
% switches of different modules
playAnimation='y';
runChenMethod='n';
runDopplerDelayMethod='n';generateRetuenSignal='y';generateFrames='y';
% if runDopplerDelayMethod==n, then 'generateRetuenSignal' and 'generateFrames'
% do not work.
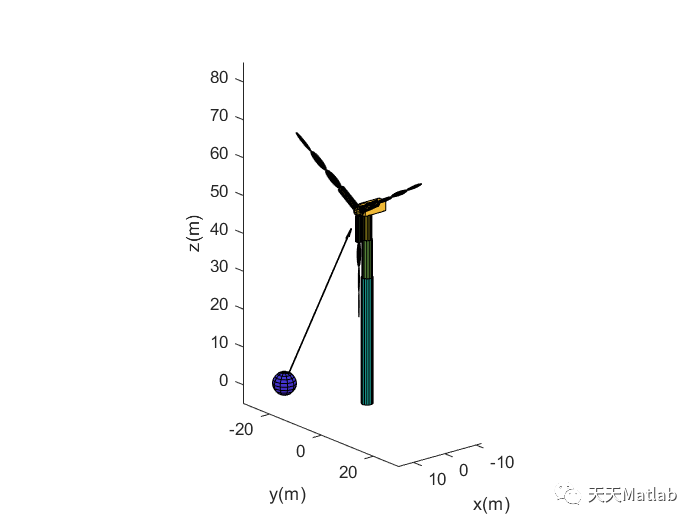
%% wind turbine parameters
tower1_height=100;tower1_radius=4.5;
tower2_height=30 ;tower2_radius=4;
tower3_height=20 ;tower3_radius=3.5;
nacelle_x=20; nacelle_y=7.5; nacelle_z=8;
nacelle_bias_x=5;nacelle_bias_y=nacelle_y/2;
rotor_radius=4;rotorCneterBeyondTheNacelle=3;
blade_1_height=20;blade_1_radius=2.5;
blade_2_x=20;% 20(typical value)
blade_2_y=5;% 5
blade_2_z=1;% 1
blade_2_rotate=20/180*pi;%20 degree
blade_3_x=20;% 20
blade_3_y=4;% 4
blade_3_z=0.5;%0.5
blade_3_rotate=40/180*pi;%40 degree
blade_4_x=20;% 20
blade_4_y=2;% 2
blade_4_z=0.3;% 0.3
blade_4_rotate=60/180*pi;%60 degree
RotateSpeed=10;% rpm (rounds per min)
ModelParameters=[tower1_height , tower1_radius , 0 , 0 ; % bottom of the tower
tower2_height , tower2_radius , 0 , 0 ; % middle of the tower
tower3_height , tower3_radius , 0 , 0 ; % top of the tower
nacelle_x , nacelle_y, nacelle_z ,0 ; % size of the nacelle
nacelle_bias_x, nacelle_bias_y , 0 , 0 ; % tower Top At The Bottom Of TheNacelle
rotor_radius , rotorCneterBeyondTheNacelle,0 ,0 ;
blade_1_height, blade_1_radius ,0 , 0 ;
blade_2_x , blade_2_y ,blade_2_z , blade_2_rotate;
blade_3_x , blade_3_y ,blade_3_z , blade_3_rotate;
blade_4_x , blade_4_y ,blade_4_z , blade_4_rotate;
RotateSpeed , 0 , 0 , 0 ];
ModelParameters(1:7,:)=ModelParameters(1:7,:)/3;
ModelParameters(8:10,1:3)=ModelParameters(8:10,1:3)/3;
%% signal parameters
sample_rate=2.5e9; % samplin Frequency in Hz
startF = 4e9; % start frequency in Hz
endF=4.5e9; % stop frequency in Hz
carrierFrequency = (startF+endF)/2;
BandWidth=endF-startF; % bandwidth in Hz
c=3e8; % speed of light in m/s
Signal_duration=7e-7; % pulse repetition period in s
Pulse_duration=0.2*Signal_duration; % pulse width in s
Pulse_time=0:1/sample_rate:Signal_duration; % short time covering one PRP
% Signal=@(t) 1/sqrt(Pulse_duration)...
% *RectangleWave(t,Pulse_duration)...
% .*exp(1i*pi*BandWidth/Pulse_duration*t.^2)...
% .*exp(1i*startF*2*pi*t);
Signal=@(t) RectangleWave(t,Pulse_duration)...
.*exp(1i*pi*BandWidth/Pulse_duration*t.^2)...
.*exp(1i*startF*2*pi*t);
%% long time parameters
startTime=0;
endTime=7;
LongSampleRate=1600;
longTimeParameters=[startTime,endTime,LongSampleRate];
dT=1/LongSampleRate;
%% radar location
radarLocation=[10,-20,2];
%% calculate position data
windTurbine_modelData = WindTurbineModel( ModelParameters,longTimeParameters );
%% play the animation
if playAnimation=='y'
AXIS=[-12,15,-30,30,-5,85];
[ animation ] = WindTurbine_animation( windTurbine_modelData,radarLocation,AXIS );
end
%% Chen method
if runChenMethod=='y'
[ spectrogram,doppler,time ] = ChenMethod_forWindTurbine( windTurbine_modelData,radarLocation,longTimeParameters,carrierFrequency );
end
%% doppler-delay method
if runDopplerDelayMethod=='y'
shortTimeParameters=[sample_rate,startF,endF,Signal_duration,Pulse_duration,c];
controlFlag=[generateRetuenSignal,generateFrames];
[DopplerDelayAnimation,spectrogram2,spectrogram_timeAxis,spectrogram_dopplerAxis,spectrogramCmplx]=Doppler_delayMethod_forWindTurbine...
( Signal,shortTimeParameters,longTimeParameters,...
windTurbine_modelData,radarLocation,controlFlag);
if (spectrogram2~=0)
fig=figure('name','spectrum2');
imagesc(spectrogram_timeAxis,spectrogram_dopplerAxis,fftshift(20*log10(spectrogram2)-max(max(20*log10(spectrogram2))),1));
colormap('jet');
colorbar;
caxis([-45,0]);
xlabel('time(s)');
ylabel('doppler(Hz)');
axis xy;
end
end
⛄ 运行结果
⛄ 参考文献
[1] 李斌, 王磊, 张少华. 脉冲多普勒雷达Matlab建模与仿真[J]. 光电技术应用, 2020, 35(4):9.
[2] 焦广伦. 脉冲多普勒雷达探测的速度盲区仿真系统[J]. 电子测量技术, 2008, 31(9):4.
[3] 何佳旺魏立明. 基于MATLAB的风力发电模拟实验系统设计[J]. 日用电器, 2021, 000(007):39-42.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料















 1542
1542











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









