






版权声明:本文为Fally J 幻灵原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:系统辨识 Identification Algorithm(基础篇)-CSDN博客
由于原文公式不全,故转载于此并将公式代码转换过来,做了略微改动,但有些地方目前还看不懂,没有验证原文的正确性。为了避免错误排版,建议在电脑端阅读。
目录
方程误差模型 Equation error type model
输出误差模型 Output error type model
基础知识
什么是系统辨识
根据测得的输入输出,通过最小化误差标准函数,确定数学模型中未知的参数取值
Identification can be defined as the determination of a mathematical model from the observed input and output data by minimizing some error criterion function.
四个基本要素:
- A data set 数据集
- A set of candidate models 模型类
- criterion function 指标函数
- optimizaiton approaches 优化方法
辨识模型
在传递函数中,我们常用微分算子\(s\)的分式来表达输入输出之间的关系。在系统辨识中,我们根据移位算子\(z\)的差分方程来表达输入、输出、噪声之间的关系
\[ \begin{align}
&\text{forward shift operator} &zu(t)=u(t+1)\\
&\text{backward shift operator}&z^{-1}u(t)=u(t-1)
\end{align} \]
在系统辨识算法中,为了让不同的情况,不同的算法有共通的体系结构,我们所有的算法均是基于辨识模型(identification model)进行推演
\[ y(t)=H_t\theta+v(t)\quad
\text{where }v(t) \text{ is white noise} \]
辨识模型的特点:无参变量\已知量 = 带参变量*待辨识参数 + 白噪声
噪声
随机变量:形容随机事件的数学描述
随机过程:随时间变化的随机变量,依赖于时间\(t\)和事件\(\omega\),当时间固定时,即随机变量
白噪声 White Noise:
\[ \begin{align}
&\text{1) expectation is zero:}\quad E[v(t)]=0 \\
&\text{2) variance } E[v^2(t)] \text{ is time invarivant} \\
&\text{3) } E[v(t)-E[v(t)]](v(\tau)-E[v(\tau)])=0
\end{align} \]
Question: which terms as follows belong to white noise if \( v(t) \) is white noise:
\[ \begin{align}
& \text{A}. zv(t) \\
& \text{B}. z^{-1}v(t) \\
& \text{C}. av(t) \\
& \text{D}. (a+bz^{-1})v(t)
\end{align} \]
根据白噪声的定义和性质可知,ABC仍然属于白噪声,而D不满足第三个条件
矩阵运算
- \(f\)列向量对\(x\)列向量的偏导:
\[ \frac{\partial f}{\partial x} = \begin{bmatrix}
\dfrac{\partial f_1}{\partial x_1} & \dfrac{\partial f_2}{\partial x_1} & \cdots & \dfrac{\partial f_m}{\partial x_1} \\
\dfrac{\partial f_1}{\partial x_2} & \dfrac{\partial f_2}{\partial x_2} & \cdots & \dfrac{\partial f_m}{\partial x_2} \\
\vdots & \vdots & \ddots & \vdots \\
\dfrac{\partial f_1}{\partial x_n} & \dfrac{\partial f_2}{\partial x_n} & \cdots & \dfrac{\partial f_m}{\partial x_n} \end{bmatrix} \]
- \(f\)标量对\(x\)列向量的偏导:
\[ \frac{\partial f}{\partial x} =\begin{bmatrix}
\dfrac{\partial f}{\partial x_1} \\
\dfrac{\partial f}{\partial x_2} \\
\vdots \\
\dfrac{\partial f}{\partial x_n} \end{bmatrix} \]
- \(f\)列向量对\(x\)标量的偏导:
\[ \frac{\partial f}{\partial x} = \begin{bmatrix}
\dfrac{\partial f_1}{\partial x} \\
\dfrac{\partial f_2}{\partial x} \\
\vdots \\
\dfrac{\partial f_m}{\partial x} \end{bmatrix} \]
- Lemma 1
\[ \text{Given } A\in \mathbb{R}^{n \times n},\
f(x)=x^\top{}Ax,\text{ one has}\\
\frac{\partial f}{\partial x}=Ax+A^\top{}x \]
- Lemma 2
\[ \text{Given } A\in \mathbb{R}^{m \times n}, \
f(x) = Ax, \text{ one has} \\
\frac{\partial f}{\partial x} = A^\top{} \]
- 链式法则(chain rule)
\[ \text{Let } x = \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{bmatrix},\
y = \begin{bmatrix} y_1 \\ y_2 \\ \vdots \\ x_r \end{bmatrix},\
z = \begin{bmatrix} z_1 \\ z_2 \\ \vdots \\ z_m \end{bmatrix},\
\text{where } z \text{ is a function of } y,\text{ which is in turn a function of }x. \text{ Then,}\\
\frac{\partial z}{\partial x} = \frac{\partial y}{\partial x}\frac{\partial z}{\partial y} \]
模型
(转载者注)本人对此章比较疑惑,建议结合其他文章阅读,如线性模型:AR、MA、ARMA、ARMAX、ARX、ARARMAX、OE、BJ等,【系统辨识】随机系统的数学模型
系统辨识中的模型均采用差分方程 difference function 的形式表达,其中
\[ A(z)=1+\sum_{i=1}^{n_a} {a_i z^{-i}},\quad
B(z)= \sum_{i=1}^{n_b} {b_i z^{-i}},\quad
C(z)= \sum_{i=1}^{n_c} {c_i z^{-i}},\quad
D(z)= \sum_{i=1}^{n_d} {d_i z^{-i}} \]
常用模型如下
时间序列模型 Time series model
- 自回归模型 AutoRegressive (AR) model
\[ \begin{align}
y(t)+a_{1}y(t-1)+a_{2}y(t-2)+\cdots+a_{n_{a}}y(t-n_{a})=v(t)\\
A(z)y(t)=v(t)
\end{align} \]
其中\(v\)是白噪声,\(n_a\)是自回归信号的阶
- 滑动平均模型 Moving Average (MA) model
\[ \begin{align}
y(t)&=v(t)+d_{1}v(t-1)+d_{2}v(t-2)+...+d_{n_{d}}v(t-n_{d})\\
y(t)&=D(z)v(t)
\end{align} \]
- 自回归滑动平均模型 AutoRegressive Moving Average (ARMA) model
\[ \begin{align}
y(t)+a_{1}y(t-1)+a_{2}y(t-2)+...+a_{n_{a}}y(t-n_{a})
&=v(t)+d_{1}v(t-1)+d_{2}v(t-2)+...+d_{n_{d}}v(t-n_{d})\\
A(z)y(t)&=D(z)v(t)
\end{align} \]
- 确定性ARMA模型 Deterministic ARMA (DARMA) model
\[ \begin{align}
y(t)+a_{1}y(t-1)+a_{2}y(t-2)+...+a_{n_{a}}y(t-n_{a})
&=u(t)+b_{1}u(t-1)+b_{2}u(t-2)+...+b_{n_{b}}u(t-n_{b})\\
A(z)y(t)&=B(z)u(t)
\end{align} \]
- 自回归整合滑动平均模型 AutoRegressive Integtated Moving Average (ARIMA) model
\[ A(z)(1-z^{-1})^{d}y(t)=D(z)v(t) \]
方程误差模型 Equation error type model
以下命名中的字母分别对应,输出信号类型、噪声类型、输入X
\[ \begin{align}
\text{General:}\quad &A(z)y(t)=B(z)u(t)+w(t)\\
\text{ARX:} \quad &A(z)y(t)=B(z)u(t)+v(t)\\
\text{ARMAX:} \quad &A(z)y(t)=B(z)u(t)+\frac{1}{C(z)}v(t)\\
\text{ARARMA(BJ):} \quad &A(z)y(t)=B(z)u(t)+\frac{D(z)}{C(z)}v(t)
\end{align} \]
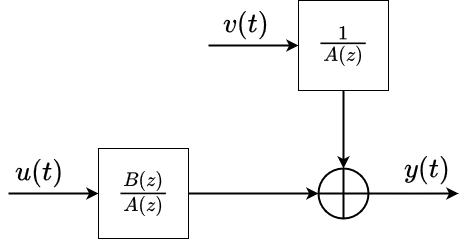
输出误差模型 Output error type model
以下命名中的字母分别对应,输出OE、输入类型、噪声类型
\[ \begin{align}
\text{General:}\quad &y(t)=\frac{B(z)}{A(z)}u(t)+w(t)\\
\text{OE:} \quad &y(t)=\frac{B(z)}{A(z)}u(t)+v(t)\\
\text{OEMA:} \quad &y(t)=\frac{B(z)}{A(z)}u(t)+D(z)v(t)\\
\text{OEARMA(BJ):} \quad &y(t)=\frac{B(z)}{A(z)}u(t)+\frac{D(z)}{C(z)}v(t)\\
\end{align} \]
最小二乘法 Least Squares Principle
此章为最小二乘法的推导过程,作为系统辨识算法推理的基础,详见最小二乘估计 (转载者注:然而这篇文章的公式也不能正常显示,于是本人也做了转载,可见最小二乘算法)
迭代最小二乘辨识 RLS identification
最小二乘辨识算法的核心,在于将现有模型转化为辨识模型(identification model)用以参数辨识
\[ y(t)=H_t\theta+v(t)\quad
\text{where }v(t) \text{ is white noise} \]
迭代最小二乘辨识的推导(对ARX模型)
\[ A(z)y(t)=B(z)u(t)+v(t) \\
A(z)=1+\sum_{i=1}^{n_a}{a_iz^{-i}};\quad B(z)=1+\sum_{i=1}^{n_b}{b_i}z^{-i} \]
\[ \text{We define}\quad \theta =
\begin{bmatrix}
a_1 & a_2 & \cdots & a_{n_a} & b_1 & b_2 & \cdots & b_{n_b}
\end{bmatrix}^{\top} \]
\[ \varphi(t)=\begin{bmatrix} -y(t-1) & -y(t-2) & \cdots & -y(t-n_a) & u(t-1) & u(t-2) & \cdots & u(t-n_b) \end{bmatrix}^{\top} \]
为了凑成辨识模型,我们定义\( \theta \)和\( \varphi \)以便后期计算,可得相应的辨识模型
\[ \begin{align}
Y_t = \begin{bmatrix} y(1) \\ y(2) \\ \vdots \\y(t)\end{bmatrix} \in \mathbb{R}^t,\
H_t &= \begin{bmatrix} \varphi^\top{}(1) \\ \varphi^\top{}(2)\\ \vdots \\ \varphi^\top{}(t)\end{bmatrix} \in \mathbb{R}^{t \times n},\
V_t = \begin{bmatrix} v(1) \\ v(2) \\ \vdots \\v(t) \end{bmatrix} \in \mathbb{R}^t,\\
\text{identification model:}\quad
Y_t &= H_t\theta+V_t\\
\text{quadratic criterion function:}\quad
J(\theta) &= V_t^\top{} V_t\\
&=(Y_t-H_t\theta)^\top{}(Y_t-H_t\theta)
\end{align} \]
根据最小二乘法中得到的结论,参数\( \theta \)的最小二乘估计为
\[ \hat{\theta}(t)=\hat{\theta}_{LS}(t)=(H_t^\top{}H_t)^{-1}H_t^\top{}Y_t \]
据此,将LSE中求逆的部分单独定义为
\[ P(t) = (H_t^{\top{}} H_t)^{-1} \]
为了保证算法的递推性,需要将LSE中的各变量递推关系式写出,如下
\[ \begin{align}
P^{-1}(t) &= H_t^\top{}H_t = \sum_{i=1}^{t}{\varphi(i)\varphi^\top(i)} = P^{-1}(t-1)+\varphi(t)\varphi^\top(t) \tag{1.1}\\
Y_t &= \begin{bmatrix} y(1) \\ y(2) \\ \vdots \\ y(t-1) \\ y(t) \end{bmatrix}
=\begin{bmatrix} Y_{t-1} \\ y(t) \end{bmatrix} \in \mathbb{R}^t;\\
H_t &= \begin{bmatrix} \varphi^\top(1) \\ \varphi^\top(2) \\ \vdots \\ \varphi^\top(t-1) \\ \varphi^\top(t) \end{bmatrix}
=\begin{bmatrix} H_{t-1} \\ \varphi^\top(t) \end{bmatrix} \in \mathbb{R}^{t \times n}
\end{align} \]
上述公式表示了各个变量在当前时刻与前一个时刻的递推关系,我们将上述递推关系代入LSE中得到递推的LSE(此步骤目的是得到 \( \theta(t) \)与\( \theta(t-1) \)之间的递推关系)
\[ \begin{align}
\hat{\theta}(t)&=(H_t^\top{}H_t)^{-1}H_t^\top{}Y_t\\
&=P(t) \begin{bmatrix} H_{t-1} \\ \varphi^\top{}(t) \end{bmatrix}^\top{}
\begin{bmatrix} Y_{t-1} \\ y(t) \end{bmatrix}\\
&=P(t)( H_{t-1}^\top{} Y_{t-1} + \varphi(t)y(t))
\end{align} \]
\[ \begin{align}
\because \
I_t &= P(t)P^{-1}(t-1) + P(t)\varphi^\top{}(t)\varphi(t)\\
\therefore\
\hat{\theta}(t) &= P(t)(P^{-1}(t-1)P(t-1)H_{t-1}^\top{}Y_{t-1} + \varphi(t)y(t))\\
&=(I_t-P(t)\varphi^\top{}(t)\varphi(t))(P(t-1)H_{t-1}^\top{}Y_{t-1})+P(t)\varphi(t)y(t)\\
&=(I_t-P(t)\varphi^\top{}(t)\varphi(t))\hat{\theta}(t-1)+P(t)\varphi(t)y(t)\\
&=\hat{\theta}(t-1)+P(t)\varphi(t)[y(t)-\varphi^\top{}(t)\hat{\theta}(t-1)]
\end{align} \]
经过上面复杂的推导,终于获得了递推最小二乘估计(Recursive Least Squares Estimation)算法
最终结论
由于矩阵求逆在实际运算中非常不友好,甚至不能保证可逆,因此引入以下矩阵多项式求逆算法:
\[ (A+BC)^{-1}=A^{-1}-A^{-1}B(I+CA^{-1}B)^{-1}CA^{-1} \]
代入到\( P(t) \)的递推关系式中,如下
\[ \begin{align}
P^{-1}(t)&=P^{-1}(t-1)+\varphi(t)\varphi^\top{}(t)\\
\Rightarrow P(t)&=P(t-1)-\frac{P(t-1)\varphi(t)\varphi^\top(t)P(t-1)}{1+\varphi^\top{}(t)P(t-1)\varphi(t)}
\end{align} \]
\( P(t) \)称为协方差矩阵(covariance matrix)
为了表示方便,下面定义一个新的变量\( L(t) \)
\[ \begin{align}
L(t)&=P(t)\varphi(t)\\
&=\frac{P(t-1)\varphi(t)}{1+\varphi^\top{}(t)P(t-1)\varphi(t)}
\end{align} \]
于是,可以得到递推最小二乘辨识的完整算法:
\[ \begin{align}
\text{Algorithm CAR-RLS:}\\
\hat{\theta}(t)&=\hat{\theta}(t-1)+P(t)\varphi(t)[y(t)-\varphi^\top{}(t)\hat{\theta}(t-1)]\\
L(t)&=\frac{P(t-1)\varphi(t)}{1+\varphi^\top{}T(t)P(t-1)\varphi(t)}\\
P(t)&=[I-L(t)\varphi^\top{}(t)]P(t-1);\ P(0)=p_0I\\
\varphi(t)&=\begin{bmatrix}-y(t-1) & -y(t-2) & \cdots & -y(t-n_a)& u(t-1)& u(t-2)& ...& u(t-n_b)\end{bmatrix} ^\top{} \tag{1.2}
\end{align} \]
几个重要概念
针对 RLSE 中各部分物理含义如下图所示

其中,根据\( P(t) \)的递推公式1.1,有下述情况需要考虑
\[ \begin{align}
P(t)&=[\frac{1}{p_0}I+\sum_{i=1}^{t}{\varphi(i)\varphi^\top{}(i)}]^{-1}\\
&=[\frac{1}{p_0}I+H_t^\top{} H_t]^{-1}\\
\xrightarrow[]{\text{let }p_0\rightarrow \infty }&\approx (H_t^\top{} H_t)^{-1}=P(t)
\end{align} \]
可见,当且仅当\( p_0 \)取较大值时,\( P(t) \)才能符合原有定义,否则算法会与实际值产生较大偏差
除此之外,在此区分定义两个概念:
新息(innovation):\( e(t) = y(t) - \varphi^\top{}(t) \hat{\theta}(t-1) \)
残差(residual): \( \hat{\varepsilon}(t) = y(t) - \varphi^\top{}(t) \hat{\theta}(t) \)
残差与新息的关系:
\[ \begin{align}
\varepsilon(t)&=y(t)-\varphi^\top{}(t)[\hat{\theta}(t-1)+L(t)e(t)]\\
&=[1-\frac{\varphi^\top{}(t)P(t)\varphi(t)}{1+\varphi^\top{}(t)P(t)\varphi(t)}]e(t)<e(t)\\
&=\frac{1}{1+\varphi^\top{}(t)P(t)\varphi(t)}e(t)>0\\
\therefore 0&<\frac{\varepsilon(t)}{e(t)}<1
\end{align} \]
带遗忘因子的迭代最小二乘辨识算法 FF-RLS
数据饱和
根据RLS算法,我们可以有以下推导
\[ \begin{align}
&\because P(t)-P(t-1)=-\frac{P(t-1)\varphi(t)\varphi^\top(t)P(t-1)}{1+\varphi^\top(t)P(t-1)\varphi(t)}<0\\
&\therefore P(t) \text{ is monotonous decreasing}\\
\text{and }&\because \text{covariance matrix } P(t)=(H_t^\top H_t)^{-1}>0\\
&\therefore \lim_{t \rightarrow \infty}P(t)=0\\
\text{then }&\hat{\theta}(t)=\hat{\theta}(t-1)+P(t-1)\varphi(t)e(t)\xrightarrow[]{t\rightarrow\infty}\hat{\theta}(t-1)
\end{align} \]
从上述推理可以发现,由于协方差矩阵\( P \)具有正定且单调递减的特性,会随着时间的增长最终趋于零,从而导致后面新加入的数据,对RLSE的影响越来越小
这种情况下,对于一个数据集,如果有效数据集中在前面,不会对算法结果产生影响,正常运行;然而,如果有效数据集中在后面,则RLS会根据前面的无效数据获得结果,且后面的有效数据因为算法这一问题,无法修正结果,此时RLS的最终结果就是错误的。针对这种,新加入数据无法正常修正辨识结果的现象,称为数据饱和(data saturation)
data saturation: a phenomenon in which the new data have no attribution to improve the estimation of the parameter \( \theta \)
带遗忘因子的RLS
为了解决数据饱和的问题,针对迭代算法,我们在每一次运算时,可以通过手动削弱之前估计值的影响,来保证新加入的数据可以修正结果
\[ y_t = \begin{bmatrix} \rho Y_{t-1} \\ y(t) \end{bmatrix} \in \mathbb{R}^t,\
H_t = \begin{bmatrix} \rho H_{t-1} \\ \varphi^\top(t) \end{bmatrix} \]
其中,\( 0<\rho<1 \)加权给过去的数据,用以削弱之前数据的影响,则之前的RLS算法(1.2)均发生改变
\[ \begin{align}
P^{-1}(t)
&=\begin{bmatrix} \rho H_{t-1} \\ \varphi^\top{}(t) \end{bmatrix}^\top
\begin{bmatrix} \rho H_{t-1} \\ \varphi^\top{}(t) \end{bmatrix}\\
&=\rho^2H_{t-1}^\top{}H_{t-1}+\varphi(t)\varphi^\top(t)\\
&=\rho^2P^{-1}(t-1)+\varphi(t)\varphi^\top(t)\\
\Leftrightarrow P(t)
&=\frac{1}{\rho^2}[I-\frac{P(t-1)\varphi(t)\varphi^\top(t)}{\rho^2+\varphi^\top(t)P(t-1)\varphi(t)}]P(t-1)\\
\xrightarrow[]{ \text{denote } \rho^2=\lambda}
&=\frac{1}{\lambda}[I-L(t)\varphi^\top(t)]P(t-1)\\
\text{where }L(t)
&=\frac{P(t-1)\varphi(t)}{\lambda+\varphi^\top(t)P(t-1)\varphi(t)}
\end{align} \]
根据上面求得的参数,RLSE为
\[ \begin{align}
\hat{\theta}(t)
&= P(t) \begin{bmatrix} \rho H_{t-1} \\ \varphi^\top{}(t) \end{bmatrix}^\top
\begin{bmatrix} \rho Y_{t-1} \\ y(t) \end{bmatrix}\\
&= P(t)(\rho^2 H_{t-1}^\top{}Y_{t-1}+\varphi(t)y(t))\\
&= \hat{\theta}(t-1)+P(t-1)\varphi(t)[y(t)-\varphi^\top(t)\hat{\theta}(t-1)]
\end{align} \]
可以发现,参数\( P \)和\( L \)均发生了改变,而RLSE的形式却没有变化
不难发现,当引入了 遗忘因子 \( \lambda \) 后,\( P \)的正定性不改变,但是却不在满足单调递减的性质,也就不在趋于零了。数据饱和得以解决

上图可以发现,采用传统的RLS算法,最后参数几乎不再变化,即几乎不受新数据影响;而遗忘因子较小时,参数误差呈发散状,达不到理想结果。一般而言,\( \lambda = 0.98 \)效果较优,既可以削弱旧数据影响,还可以避免过快的衰减
这种通过加入遗忘因子,来增加新数据权重,削弱旧数据影响的方式,称为带有遗忘因子的递推最小二乘辨识算法FF-RLS(Forgetting factor recursive least squares identification algorithm)
FF-RLS: the idea that introduce a factor for old data, in order to increase the contribution of new data and to reduce the influence of old data
基础篇总结
以上主要是针对系统辨识的目的、原理、基本推导方法进行总结归纳。
主要掌握通用RLS算法(1.2),以及数据饱和现象及其应对方式,知晓遗忘因子的作用和对RLS算法的影响















 5746
5746











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









