






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
先进PID控制算法(ADRC, TD, ESO)研究是对传统PID控制算法进行改进和优化的研究工作。这些算法通过引入新的控制策略和技术,提高了PID控制系统的性能和鲁棒性。
ADRC(Active Disturbance Rejection Control)是一种基于主动干扰抑制控制的算法。它通过对系统的干扰进行估计和补偿,实现对干扰的主动抑制,从而提高了系统的鲁棒性和控制精度。
TD(Two-Degree-of-Freedom)是一种基于两个自由度的控制算法。它将PID控制器分为两个部分,一个用于跟踪参考信号,另一个用于抑制干扰。通过独立调节这两个部分的参数,可以实现更好的跟踪性能和干扰抑制能力。
ESO(Extended State Observer)是一种扩展状态观测器算法。它通过估计系统的扩展状态,包括未建模的动态和干扰,从而实现对这些状态的补偿和抑制。ESO算法可以提高系统的鲁棒性和控制精度,特别适用于存在未建模动态和干扰的系统。
这些先进PID控制算法在工业控制系统中得到了广泛的应用和研究。通过引入新的控制策略和技术,它们可以提高系统的控制性能和鲁棒性,适应更加复杂和变化的工业控制需求。研究人员通过理论分析和实验验证,不断改进和优化这些算法,使其更加适用于不同的控制场景和应用领域。
【先进PID控制算法整合研究】本研究聚焦于将先进的PID控制策略—自适应差分反馈控制(ADRC)、时滞补偿(TD)、扩展状态观测器(ESO)应用于永磁同步电机(PMSM)发电控制系统的仿真模型,旨在提高控制性能,包括动态响应速度、稳定性、抗干扰能力及对非线性、不确定性因素的适应性。
1. 研究背景
永磁同步电机因高效、高功率密度和宽调速范围等特点,在风力发电、电动汽车等多个领域有着广泛的应用。然而,其控制系统的复杂性,特别是存在非线性、参数时变性以及外部干扰,对传统的PID控制提出了挑战。因此,整合先进控制算法以优化PMSM发电控制策略成为当前研究的热点。
2. 先进控制算法概述
自适应差分反馈控制(ADRC)
ADRC是一种基于模型的控制策略,它不依赖于精确的系统模型,而是通过构造一个局域线性模型(通常是积分器加微分器的形式)和自适应参数调整机制来实现对非线性、时变系统的有效控制。
时滞补偿(TD)
考虑到实际控制系统中普遍存在的时滞问题,TD技术通过在控制算法中引入补偿环节,预测未来的控制需求,以提前做出反应,减少甚至消除时滞带来的负面影响,提高控制系统的稳定性和快速性。
扩展状态观测器(ESO)
ESO是一种观测器设计方法,能在不知道或部分知道系统精确模型的情况下估计出系统的状态,尤其是对于难以直接测量的状态变量,从而增强了控制器的设计灵活性和对系统扰动的鲁棒性。
3. 整合方案与仿真模型
-
设计思路:将ADRC的核心思想融入到PID控制的微分项和积分项中,增强其对非线性动态的适应能力;结合TD技术于PID控制器中,以减轻控制信号传输和执行中的时滞效应;利用ESO估计PMSM的关键未测量状态(如转子位置、转速等),提高控制精度。
-
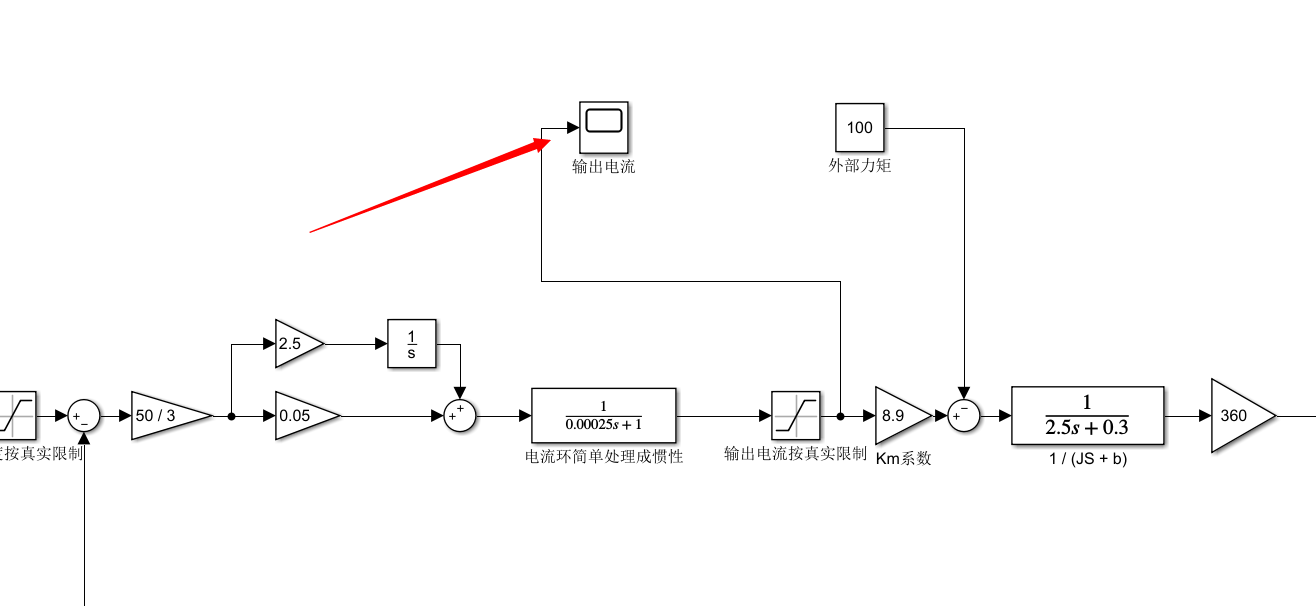
仿真模型构建:使用Matlab/Simulink或其他仿真平台,构建PMSM发电系统的详细数学模型,包括电机本体模型、负载模型、传感器模型及控制器模块。在控制器模块中,实现融合ADRC、TD和ESO的先进PID控制算法。
-
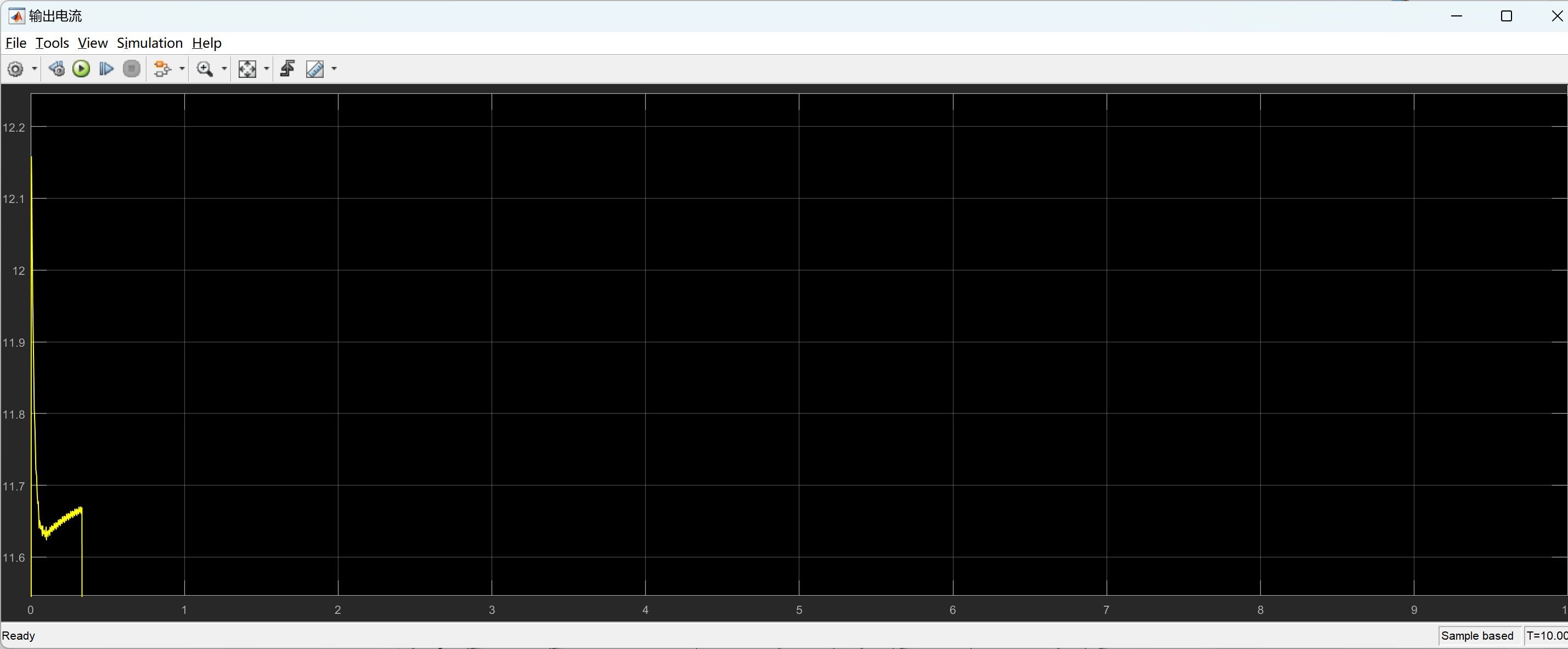
性能评估:通过仿真,对比分析传统PID控制与整合了ADRC、TD和ESO的先进PID控制策略在面对不同运行条件(如负载变化、电网波动)时的动态响应速度、稳态误差、抗扰动能力等性能指标。
4. 结论与展望
该研究旨在展示通过融合ADRC、TD和ESO的PID控制策略如何有效提升永磁同步电机发电控制系统的性能。预期研究成果将为解决复杂系统控制难题提供新的视角,并促进PMSM在新能源领域的高效应用。未来研究方向可能包括实测验证、算法的硬件实现以及进一步算法优化,以适应更广泛的实际工况。
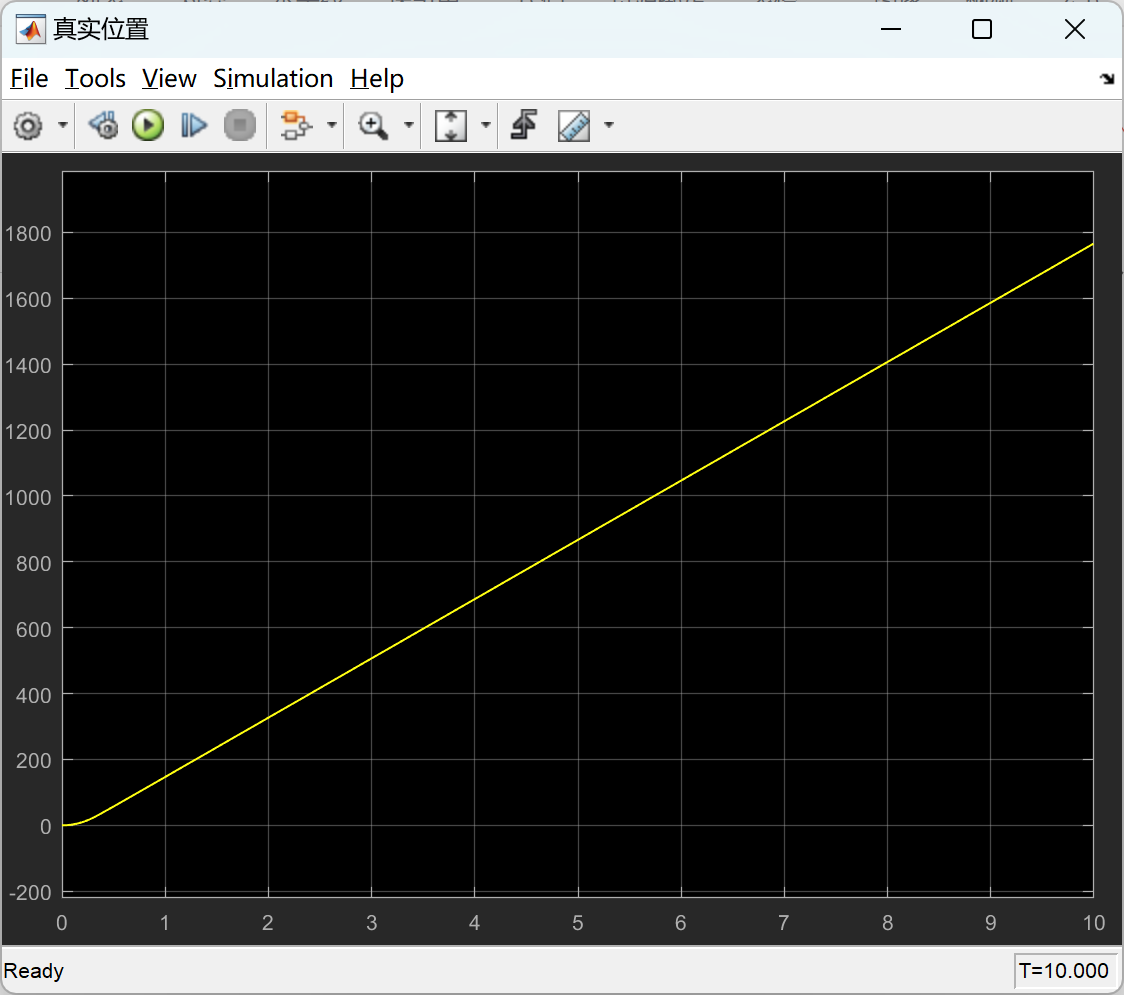
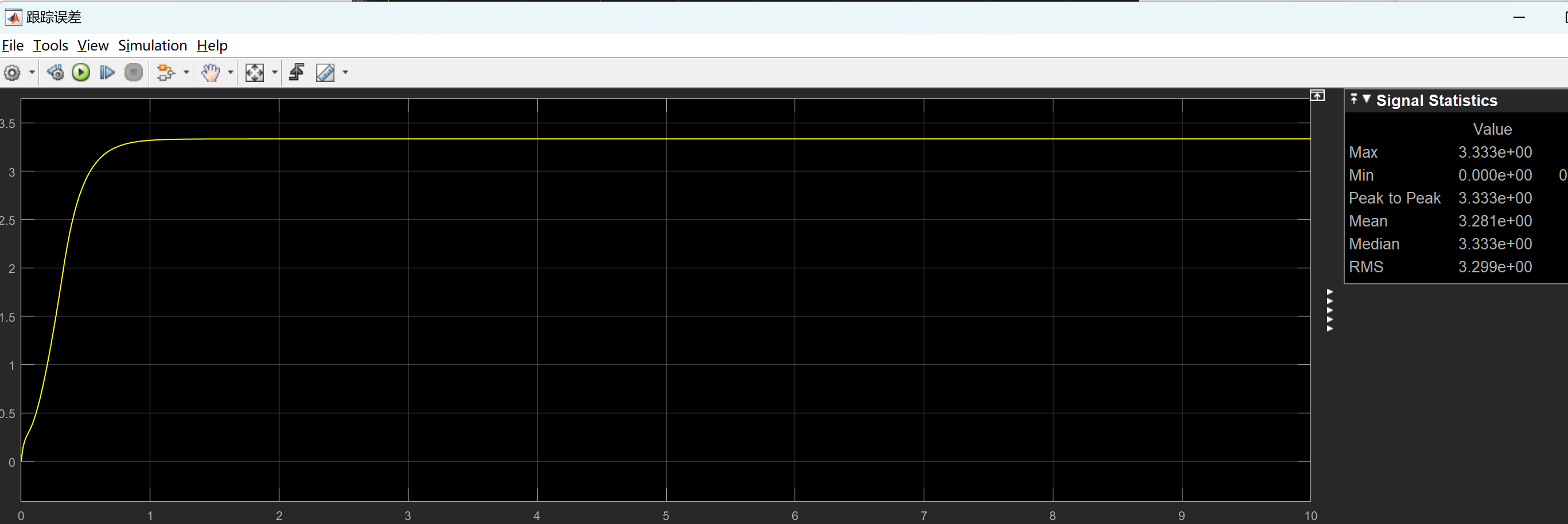
📚2 运行结果
2.1 非线性自抗扰控制

2.2 线性自抗扰控制


2.3 Simulink仿真
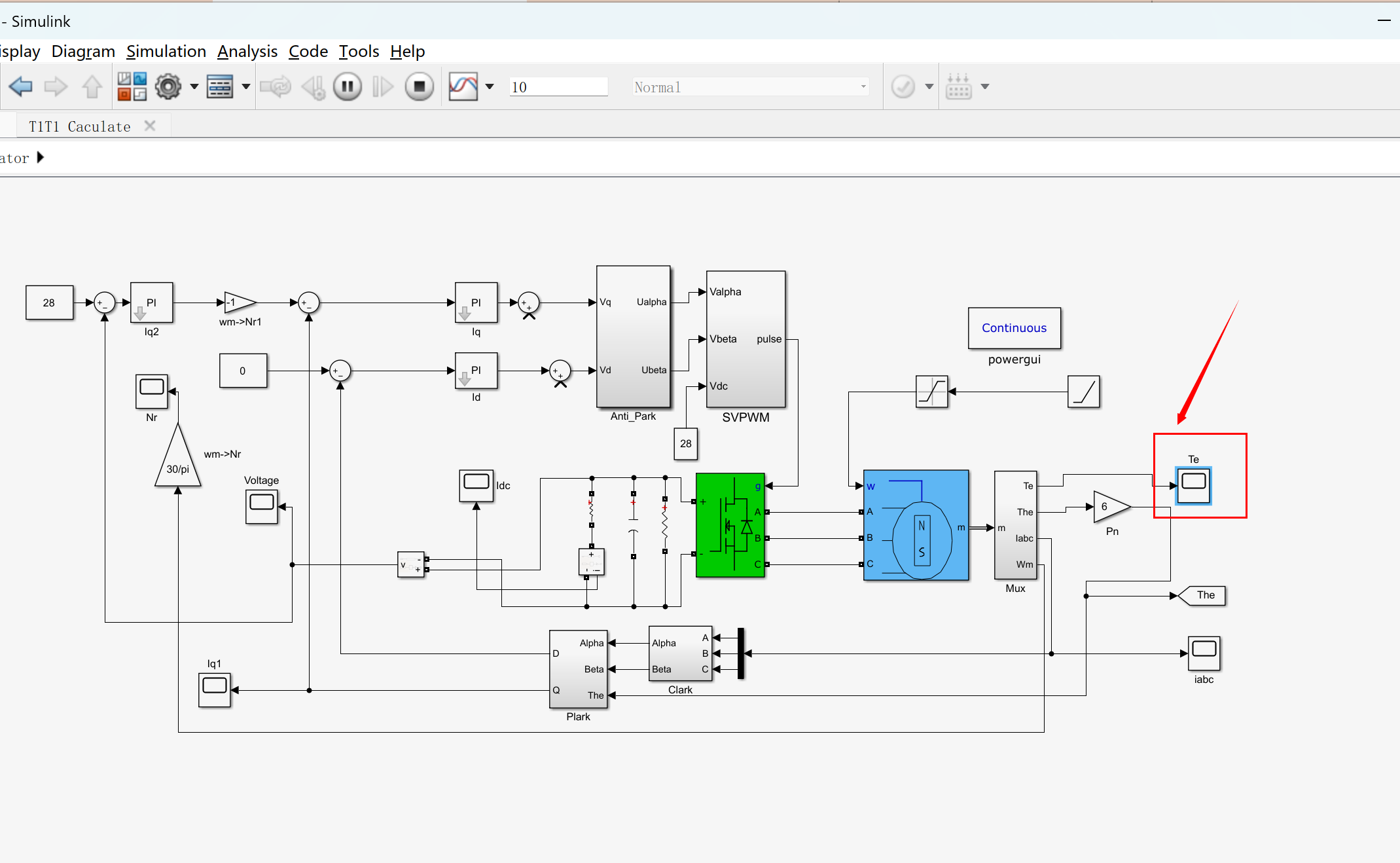

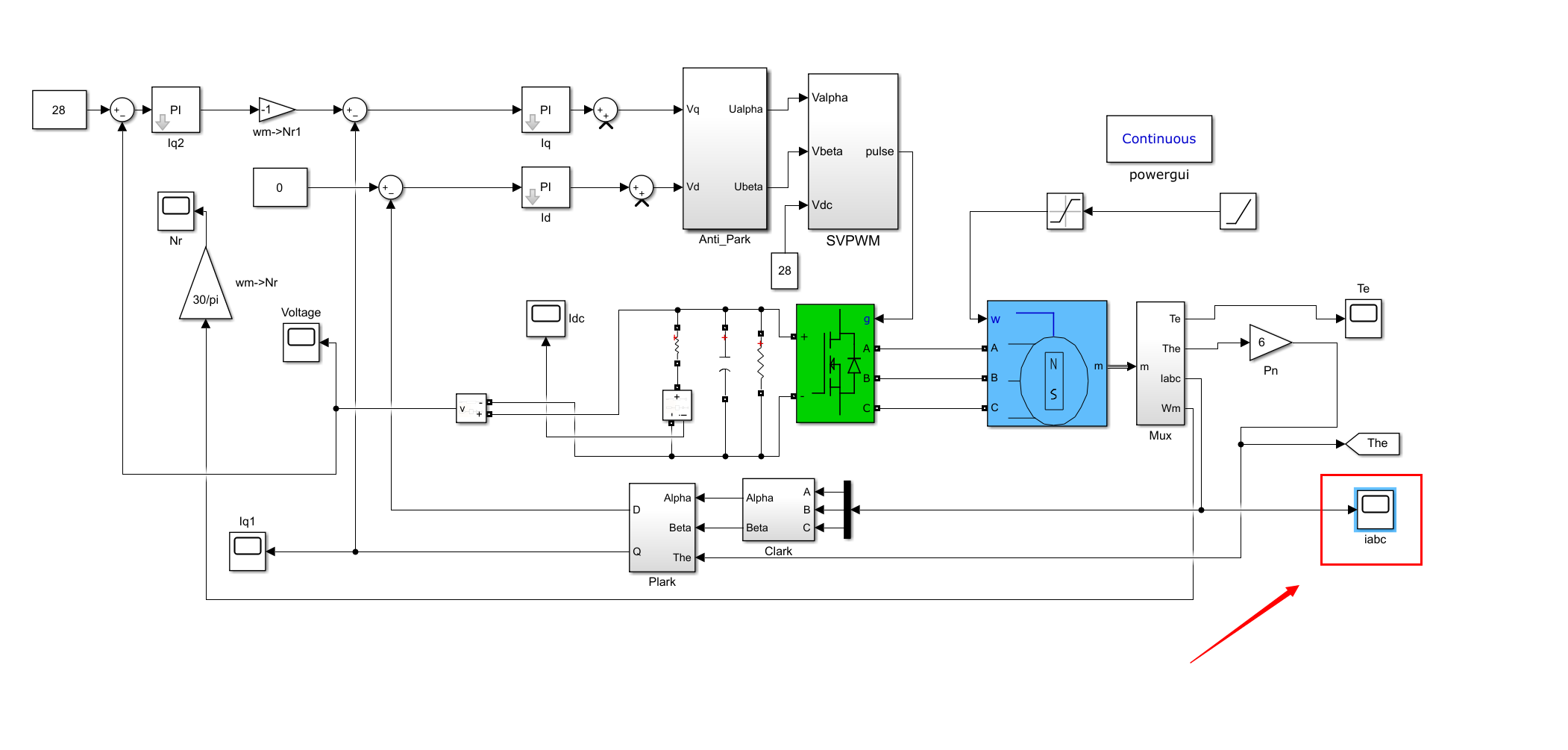
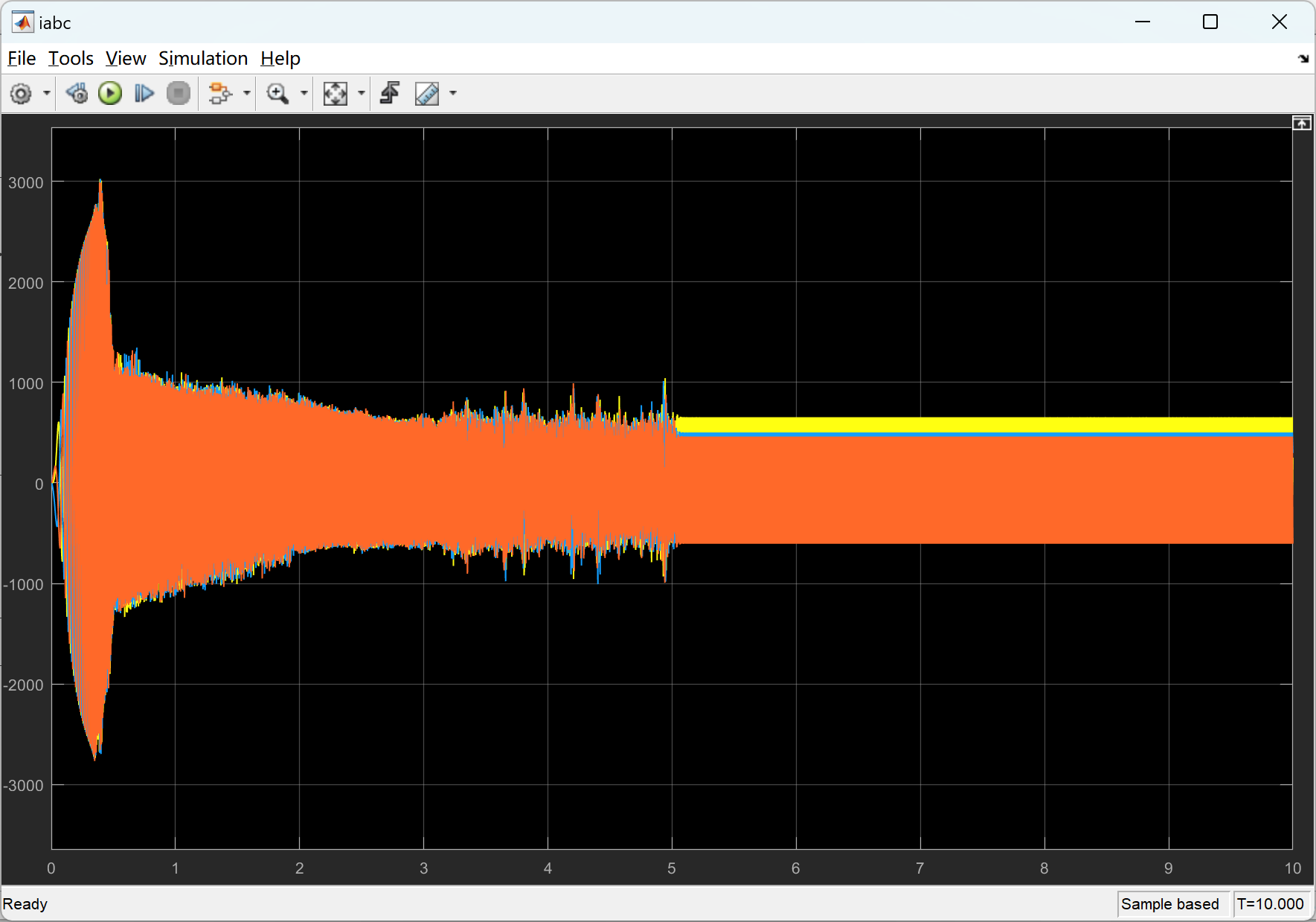

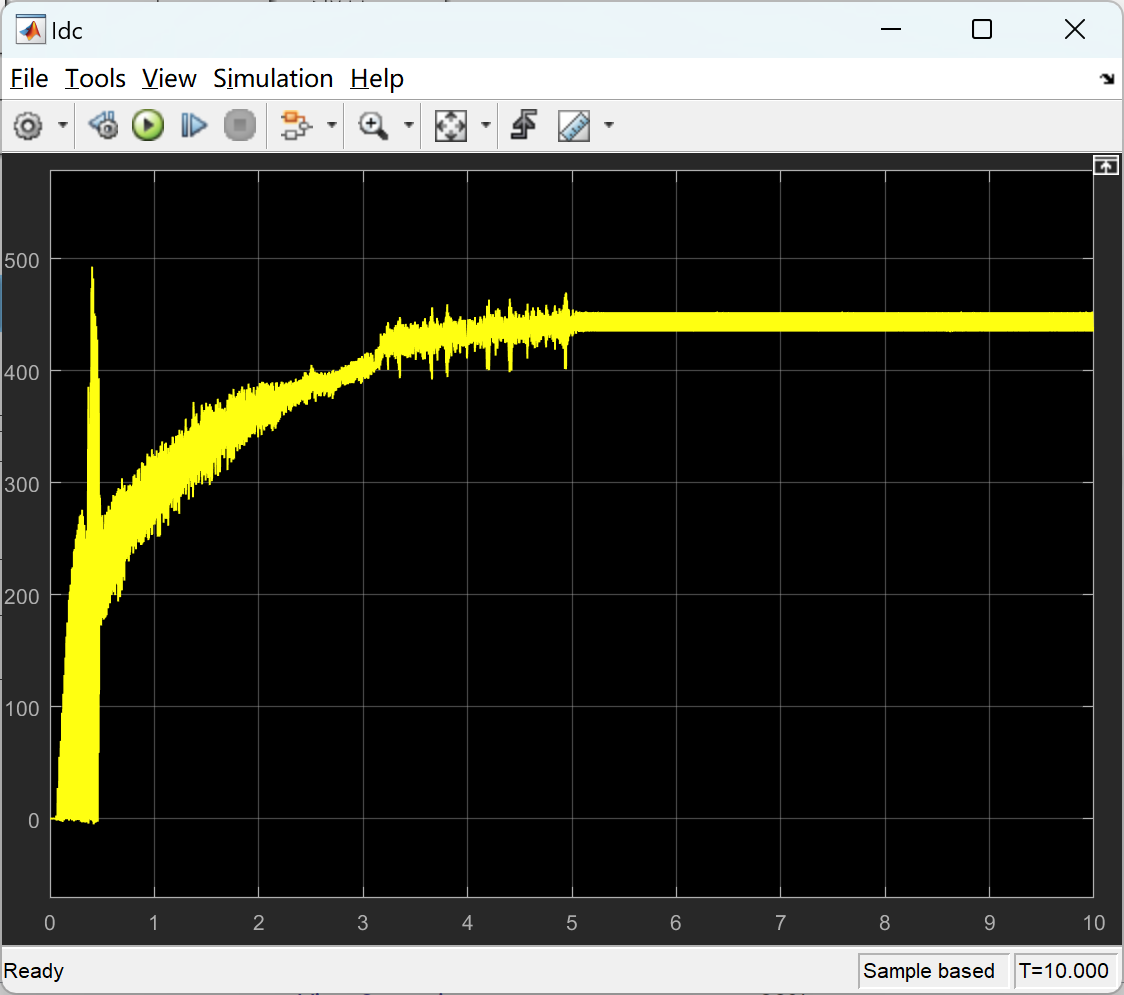
2.4 永磁同步电机发电控制仿真模型





部分代码:
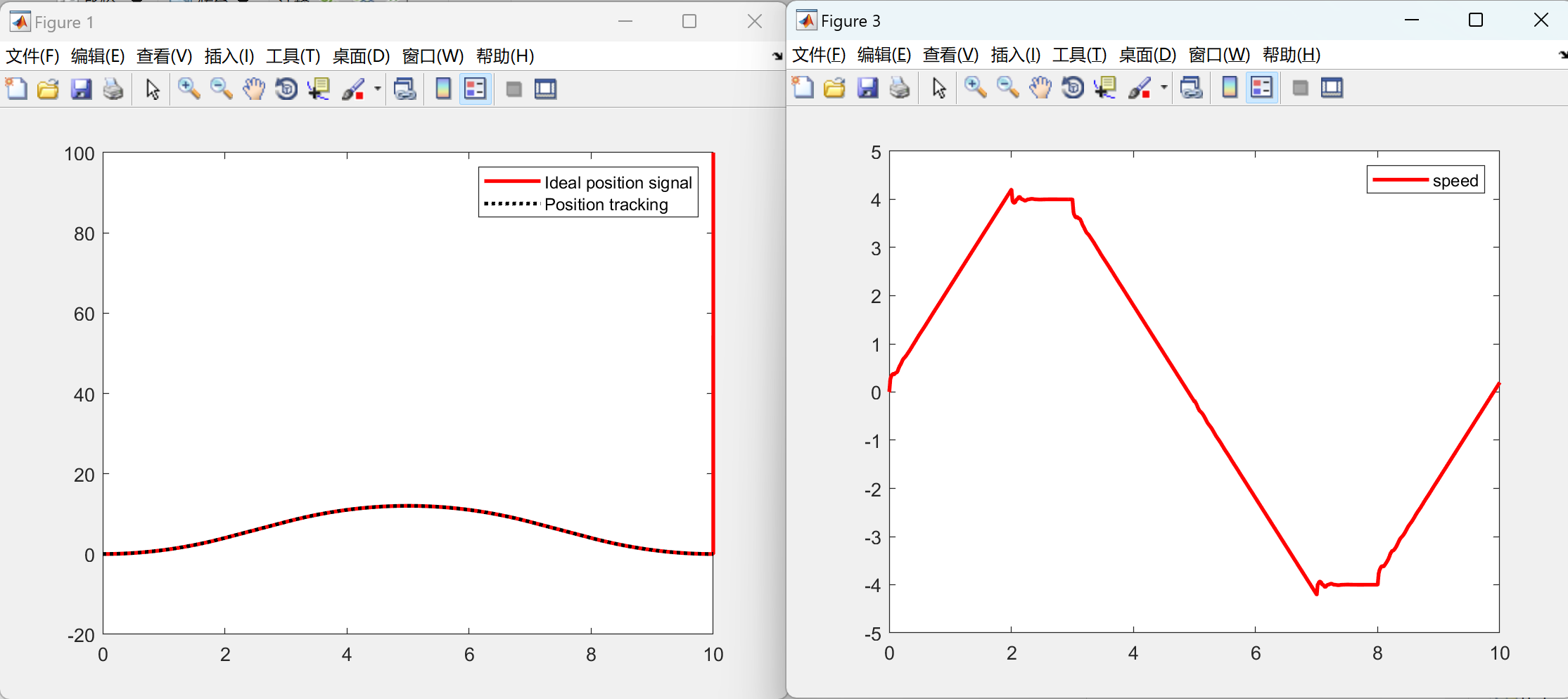
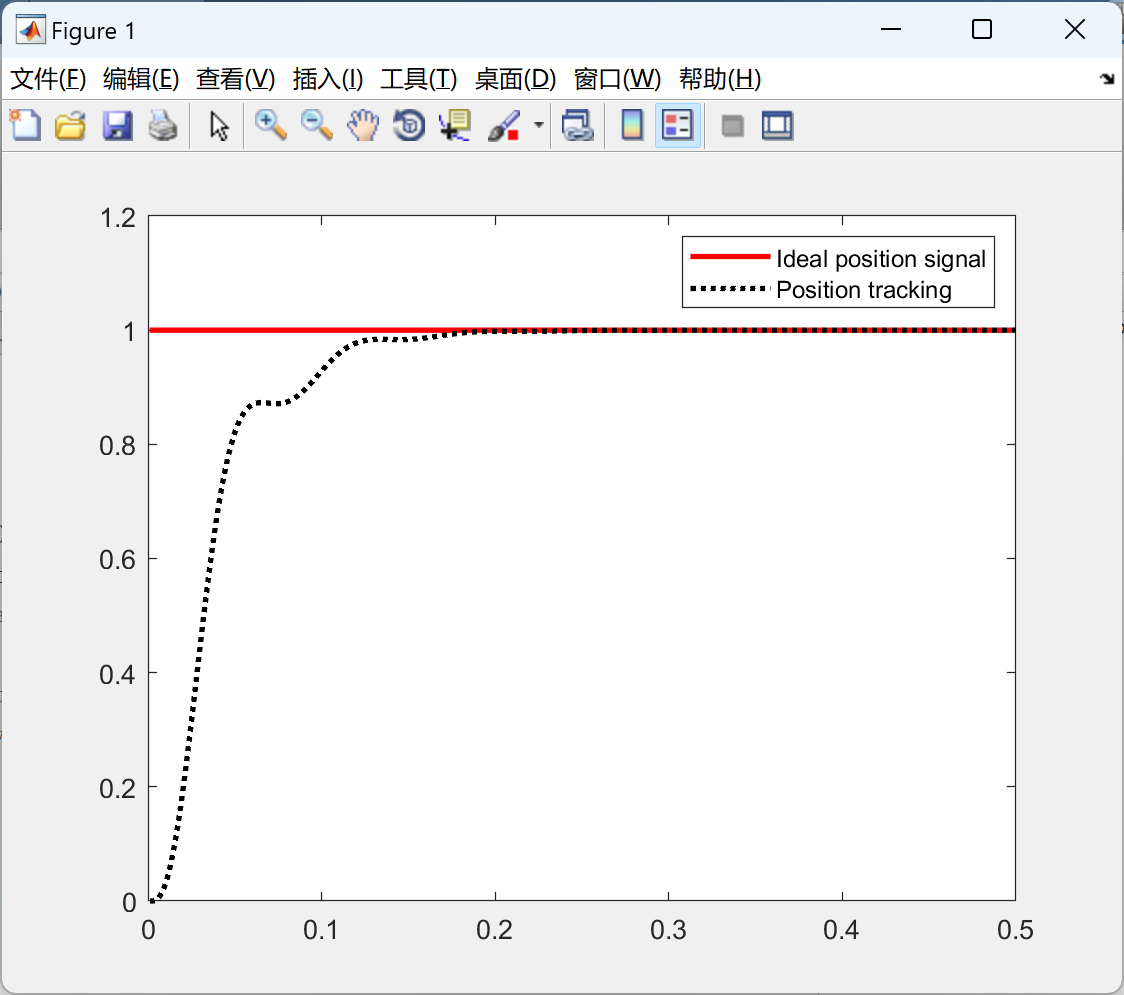
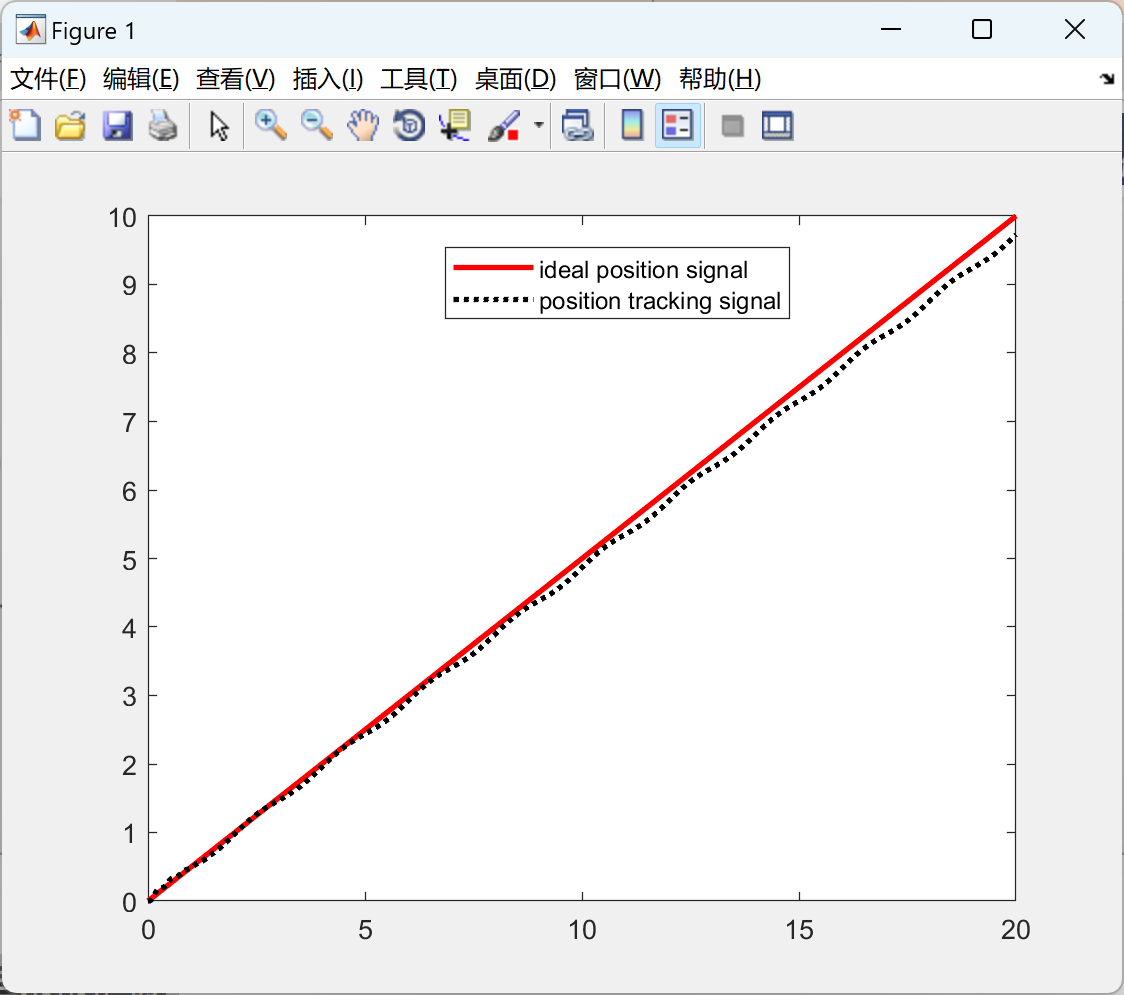
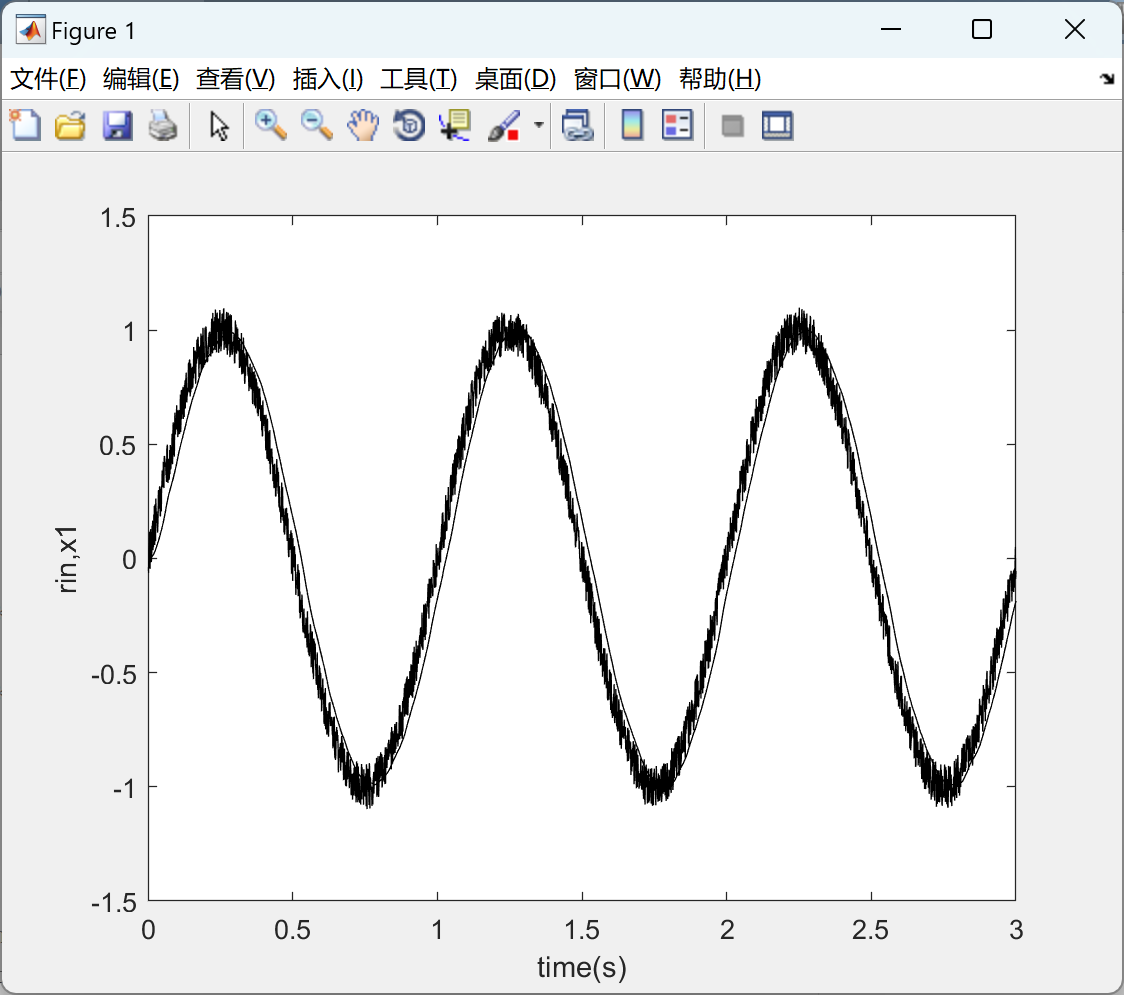
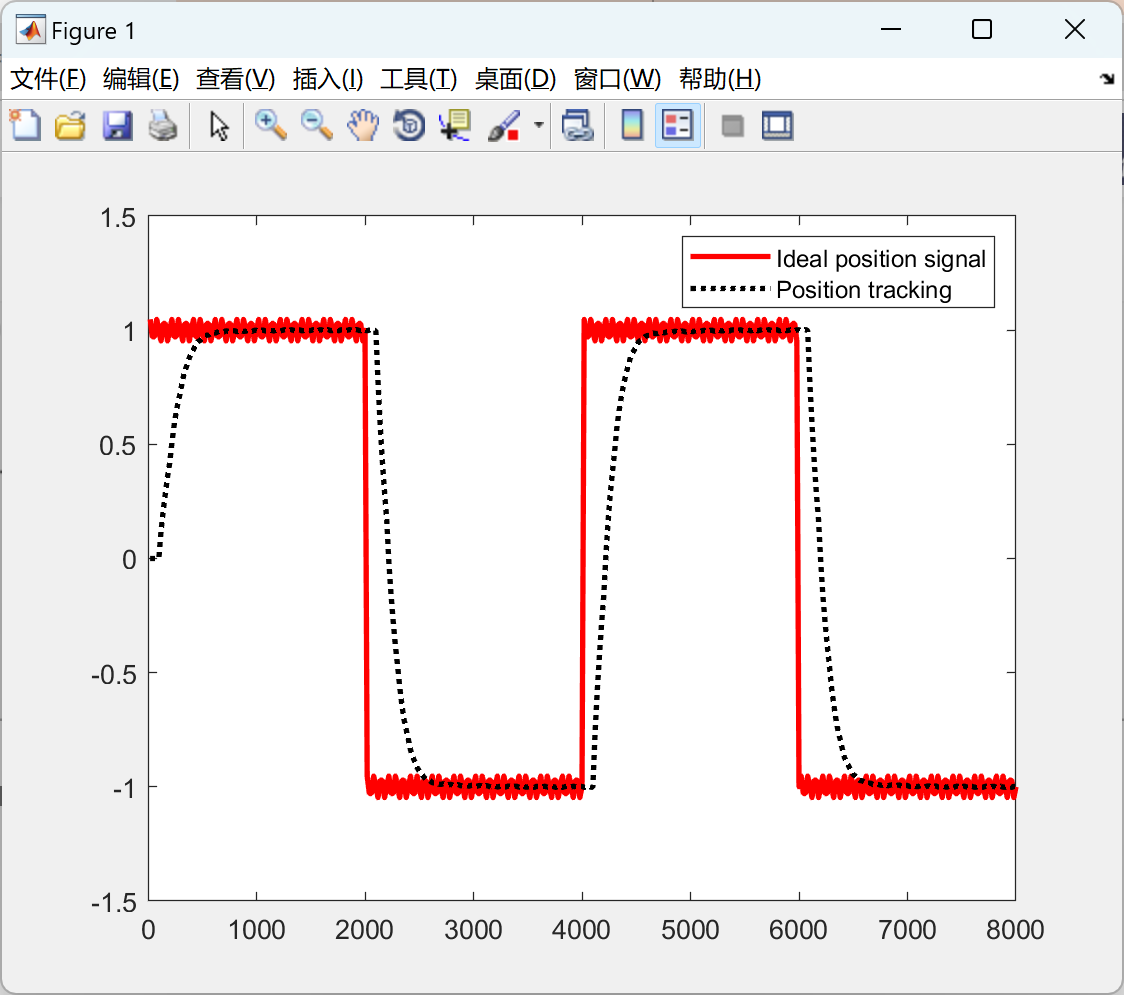
figure(1);
plot(time, v, 'r',time, y, 'k:', 'linewidth', 2);
% plot(time, e1, 'r', 'linewidth', 2);
legend('ideal position signal', 'position tracking signal');
function f = fst(x1,x2,delta,T)
d = delta * T;
d0 = T * d;
y = x1 + T * x2;
a0 = sqrt(d^2 + 8 * delta * abs(y));
if abs(y) > d0
a = x2 + (a0 - d) / 2 * sign(y);
else
a = x2 + y / T;
end
if abs(a) > d
f = -delta * sign(a);
else
f = -delta * a/d;
end
end
function y = fal(epec,alfa,delta)
if abs(epec) > delta
y = abs(epec)^alfa * sign(epec);
else
y = epec / (delta^(1 - alfa));
end
end
function v = TD_ADRC(vo, yd, T, delta)
v = zeros(2, 1);
x1 = vo(1) - yd;
x2 = vo(2);
v(1) = vo(1) + T * vo(2);
v(2) = vo(2) + T * fst(x1, x2, delta, T);
end
function z = LESO_ADRC(zo, y, uo, T)
w0 = 7.5;
z = zeros(3, 1);
e = zo(1) - y;
z(1) = zo(1) + T * (z(2) - 3 * w0 * e);
z(2) = zo(2) + T * (z(3) - 3 * w0 * w0 * e + 133 * uo);
z(3) = zo(3) - T * w0 * w0 * w0 * e;
end
function dy = PlantModel(yo, ut, clock, T)
dy = zeros(3, 1);
f = -25 * yo(2) + 33 * sin(pi * clock);
%f = -25 * yo(2) + 0.5 * sign(sin(pi * clock));
dy(1) = yo(1) + yo(2) * T;
dy(2) = yo(2) + yo(3) * T;
dy(3) = (f + 133 * ut) ;
end
function v = TD_Levant(zo, y, T)
v = zeros(2, 1);
alfa = 2;
nmna = 6;
v(1) = zo(1) + T * (zo(2) - nmna * sqrt(abs(zo(1) - y)) * sign(zo(1) - y));
v(2) = zo(2) - T * alfa * sign(zo(1) - y);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]吉祥.永磁直线电机ADRC控制研究[D].浙江理工大学[2023-08-12].DOI:CNKI:CDMD:2.1017.043063.
[2]杨宣,张保生.基于先进控制算法的CFBB床温控制系统研究[J].自动化与仪表, 2018, 33(1):5.DOI:CNKI:SUN:ZDHY.0.2018-01-030.
[3]李杰,齐晓慧,韩帅涛.四种先进PID控制方法及性能比较[J].计算技术与自动化, 2012.DOI:CNKI:SUN:JSJH.0.2012-03-005.















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









