






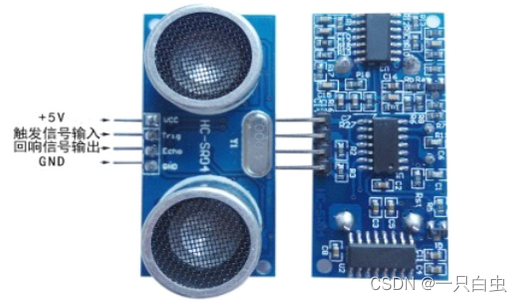
一、HC-SR04简介
HC-SR04 超声波测距模块可提供2cm-400cm 的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
1、HC-SR04 超声波测距模块工作原理
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
2、电气参数

3、超声波时序图
 以上时序图表明你只需要提供一个 10uS 以上脉冲触发信号,该模块内部将发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式:uS/58=厘米或者 uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上,以防止发射信号对回响信号的影响。
以上时序图表明你只需要提供一个 10uS 以上脉冲触发信号,该模块内部将发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式:uS/58=厘米或者 uS/148=英寸;或是:距离=高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上,以防止发射信号对回响信号的影响。
二、使用STM32CubeIDE完成代码
1、IOC文件配置
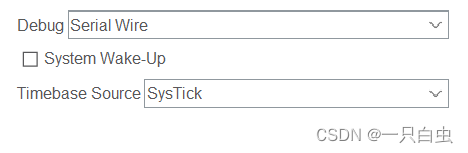
时钟配置
SYS
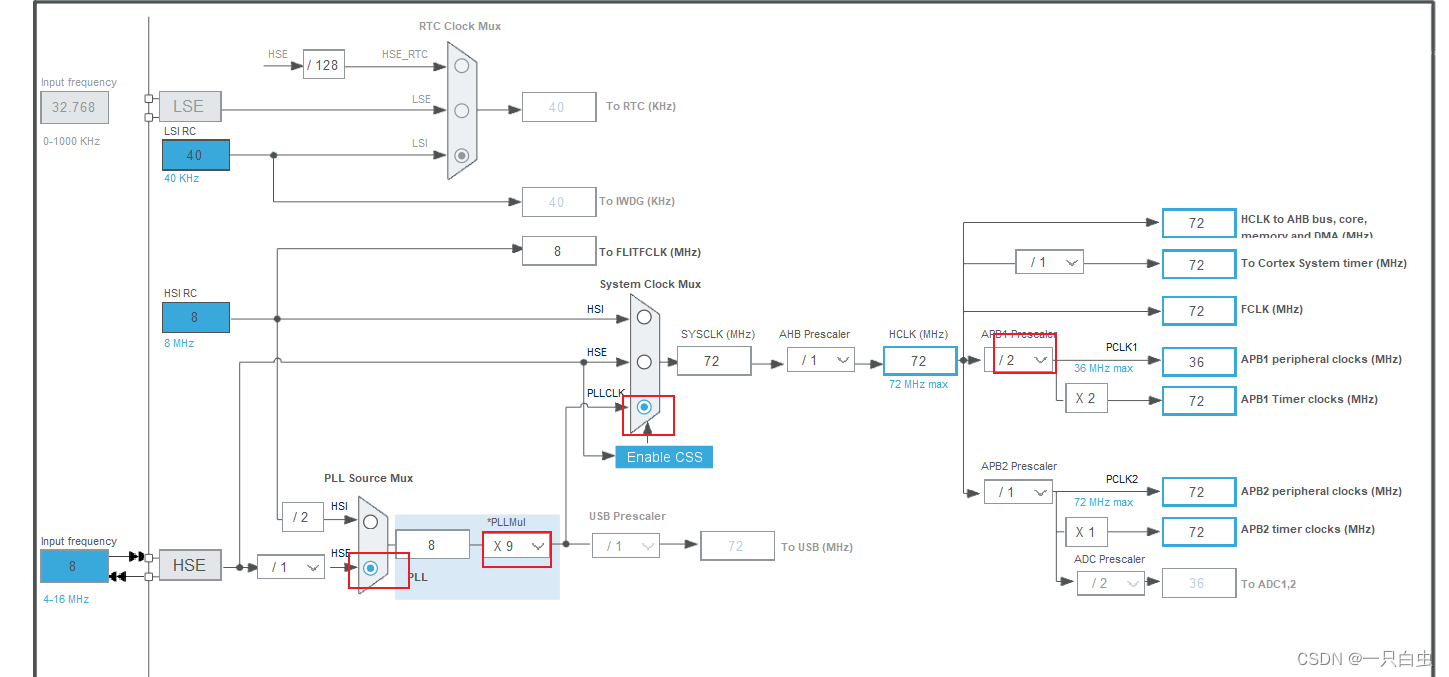
RCC

时钟树
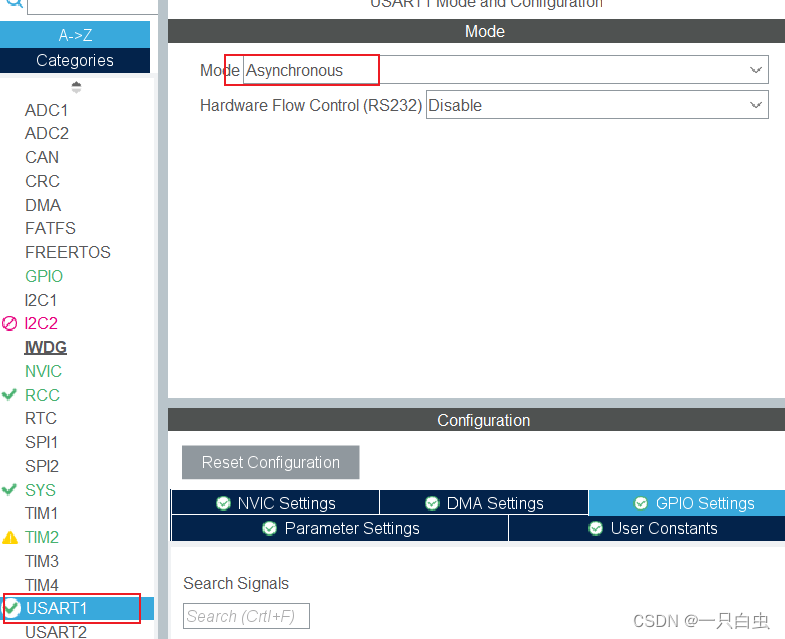
串口通信设置
用于电脑接收数据
 定时器配置
定时器配置
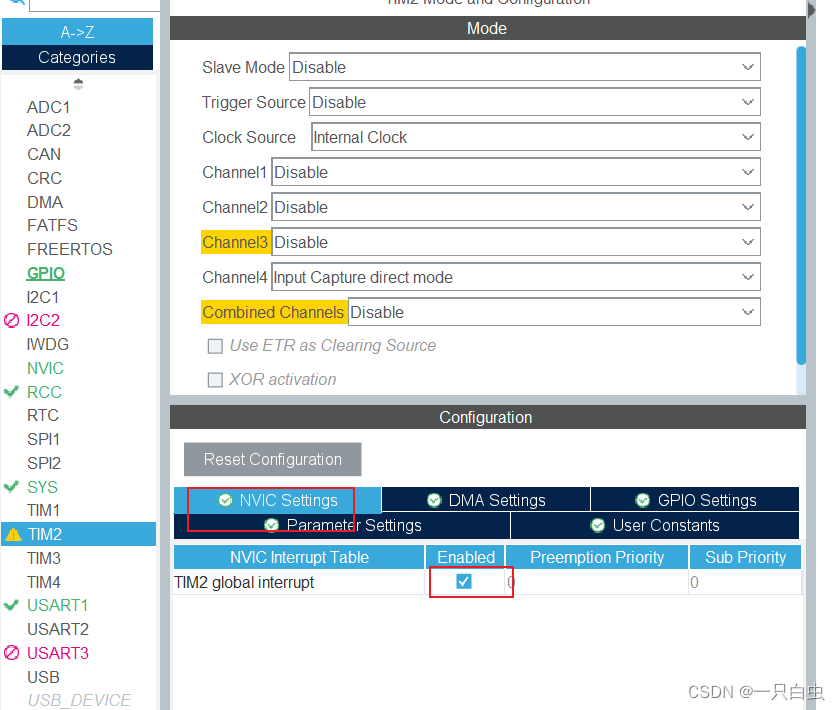
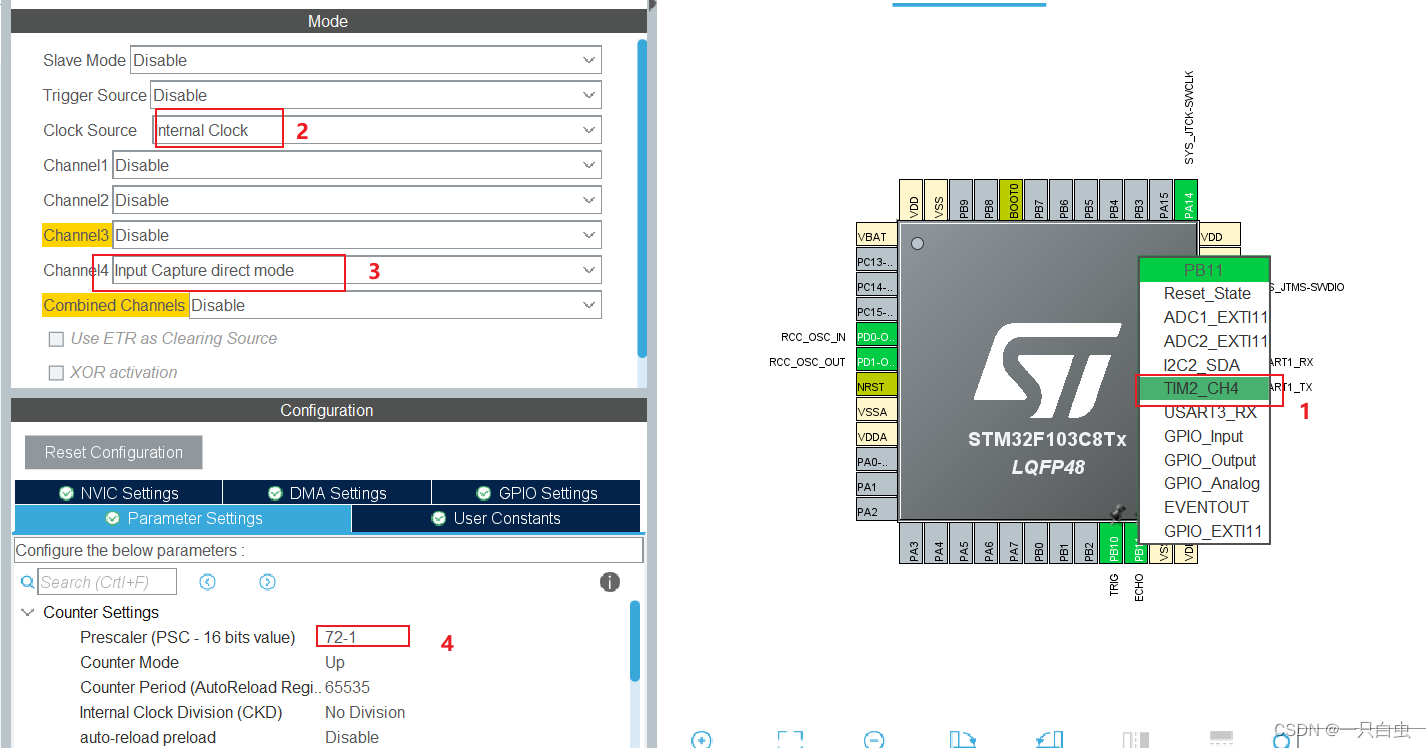 开启定时器中断
开启定时器中断
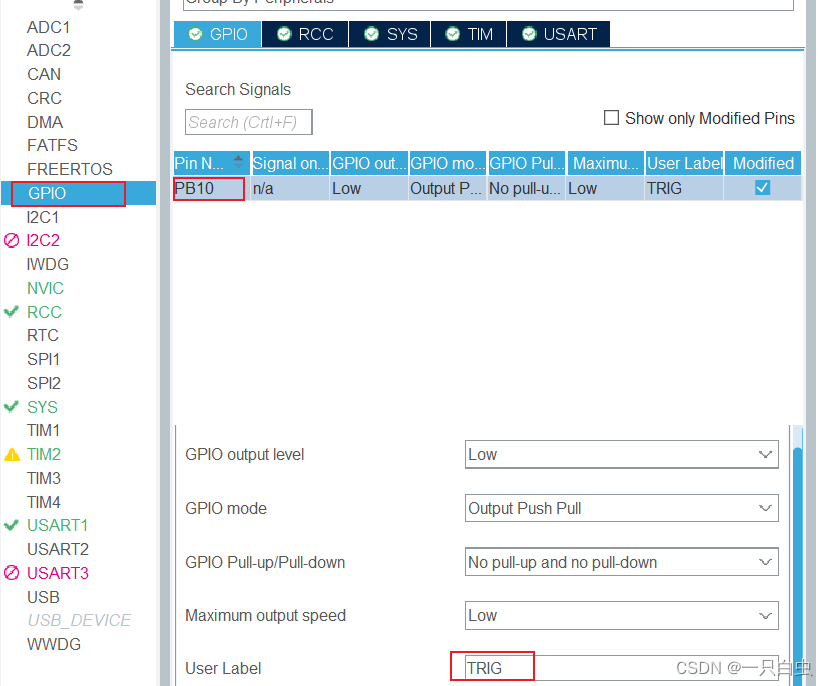
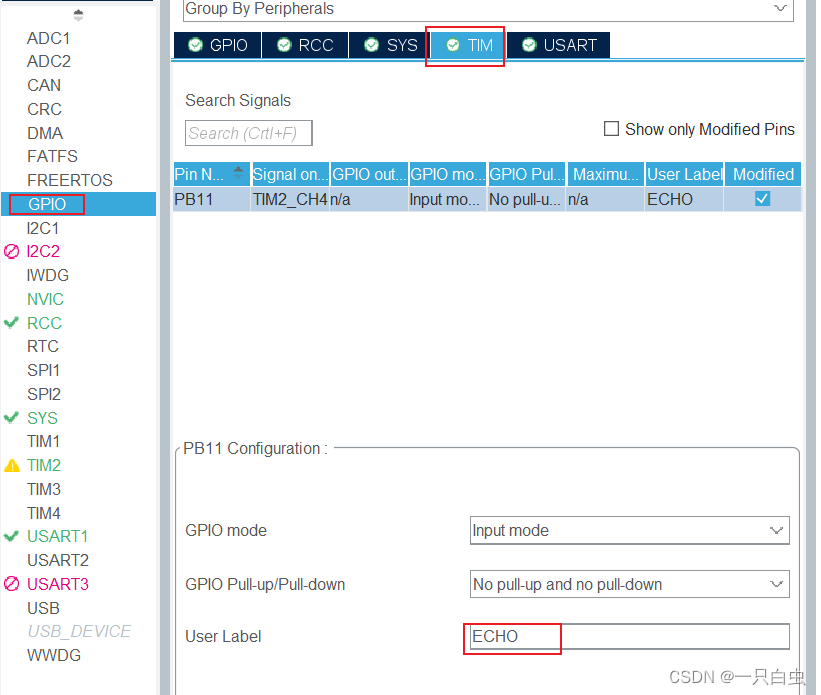
引脚配置
触发引脚PB10
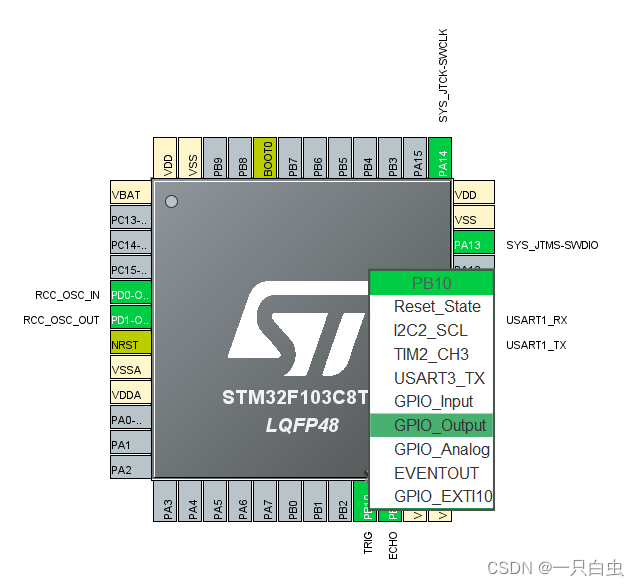
修改引脚名称
2、完成代码
hc-sr04.h
/*
* hc-sr04.h
*
* Created on: Jun 1, 2023
* Author: 25825
*/
#ifndef INC_HC_SR04_H_
#define INC_HC_SR04_H_
#include "main.h"
#include "Delay.h"
typedef struct
{
uint8_t edge_state;
uint16_t tim_overflow_counter;
uint32_t prescaler;
uint32_t period;
uint32_t t1; // 上升沿时间
uint32_t t2; // 下降沿时间
uint32_t high_level_us; // 高电平持续时间
float distance;
TIM_TypeDef* instance;
uint32_t ic_tim_ch;
HAL_TIM_ActiveChannel active_channel;
}Hcsr04InfoTypeDef;
extern Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel);
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start();
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim);
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim);
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read();
#endif /* INC_HC_SR04_H_ */
hc-sr04.c
/*
* hc-sr04.c
*
* Created on: Jun 1, 2023
* Author: 25825
*/
#include "hc-sr04.h"
Hcsr04InfoTypeDef Hcsr04Info;
/**
* @description: 超声波模块的输入捕获定时器通道初始化
* @param {TIM_HandleTypeDef} *htim
* @param {uint32_t} Channel
* @return {*}
*/
void Hcsr04Init(TIM_HandleTypeDef *htim, uint32_t Channel)
{
/*--------[ Configure The HCSR04 IC Timer Channel ] */
// MX_TIM2_Init(); // cubemx中配置
Hcsr04Info.prescaler = htim->Init.Prescaler; // 72-1
Hcsr04Info.period = htim->Init.Period; // 65535
Hcsr04Info.instance = htim->Instance; // TIM2
Hcsr04Info.ic_tim_ch = Channel;
if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_1)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_1; // TIM_CHANNEL_4
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_2)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_2; // TIM_CHANNEL_4
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_3)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_3; // TIM_CHANNEL_4
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_4)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_4; // TIM_CHANNEL_4
}
else if(Hcsr04Info.ic_tim_ch == TIM_CHANNEL_4)
{
Hcsr04Info.active_channel = HAL_TIM_ACTIVE_CHANNEL_4; // TIM_CHANNEL_4
}
/*--------[ Start The ICU Channel ]-------*/
HAL_TIM_Base_Start_IT(htim);
HAL_TIM_IC_Start_IT(htim, Channel);
}
/**
* @description: HC-SR04触发
* @param {*}
* @return {*}
*/
void Hcsr04Start()
{
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_SET);
Delay_us(10); // 10us以上
HAL_GPIO_WritePin(TRIG_GPIO_Port, TRIG_Pin, GPIO_PIN_RESET);
}
/**
* @description: 定时器计数溢出中断处理函数
* @param {*} main.c中重定义void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
* @return {*}
*/
void Hcsr04TimOverflowIsr(TIM_HandleTypeDef *htim)
{
if(htim->Instance == Hcsr04Info.instance) // TIM2
{
Hcsr04Info.tim_overflow_counter++;
}
}
/**
* @description: 输入捕获计算高电平时间->距离
* @param {*} main.c中重定义void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
* @return {*}
*/
void Hcsr04TimIcIsr(TIM_HandleTypeDef* htim)
{
if((htim->Instance == Hcsr04Info.instance) && (htim->Channel == Hcsr04Info.active_channel))
{
if(Hcsr04Info.edge_state == 0) // 捕获上升沿
{
// 得到上升沿开始时间T1,并更改输入捕获为下降沿
Hcsr04Info.t1 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_FALLING);
Hcsr04Info.tim_overflow_counter = 0; // 定时器溢出计数器清零
Hcsr04Info.edge_state = 1; // 上升沿、下降沿捕获标志位
}
else if(Hcsr04Info.edge_state == 1) // 捕获下降沿
{
// 捕获下降沿时间T2,并计算高电平时间
Hcsr04Info.t2 = HAL_TIM_ReadCapturedValue(htim, Hcsr04Info.ic_tim_ch);
Hcsr04Info.t2 += Hcsr04Info.tim_overflow_counter * Hcsr04Info.period; // 需要考虑定时器溢出中断
Hcsr04Info.high_level_us = Hcsr04Info.t2 - Hcsr04Info.t1; // 高电平持续时间 = 下降沿时间点 - 上升沿时间点
// 计算距离
Hcsr04Info.distance = (Hcsr04Info.high_level_us / 1000000.0) * 340.0 / 2.0 * 100.0;
// 重新开启上升沿捕获
Hcsr04Info.edge_state = 0; // 一次采集完毕,清零
__HAL_TIM_SET_CAPTUREPOLARITY(htim, Hcsr04Info.ic_tim_ch, TIM_INPUTCHANNELPOLARITY_RISING);
}
}
}
/**
* @description: 读取距离
* @param {*}
* @return {*}
*/
float Hcsr04Read()
{
// 测距结果限幅
if(Hcsr04Info.distance >= 450)
{
Hcsr04Info.distance = 450;
}
return Hcsr04Info.distance;
}
Delay.h(精准到us的计时器)
#ifndef __DELAY_H
#define __DELAY_H
void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);
#endif
Delay.c
#include "stm32f1xx_hal.h"
#include "Delay.h"
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus;
SysTick->VAL = 0x00;
SysTick->CTRL = 0x00000005; while(!(SysTick->CTRL & 0x00010000));
SysTick->CTRL = 0x00000004;
}
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
重写printf函数
int __io_putchar(int ch)
{
HAL_UART_Transmit(&huart1,(char*)&ch,1,1);
return ch;
}
main.c其他添加部分
/**
main函数前添加
**/
char rxbuf_uart[128];//用于存放串口传输的数据
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//定时器中断函数
{
Hcsr04TimIcIsr(htim);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)//定时器溢出中断
{
Hcsr04TimOverflowIsr(htim);
}
/**
main函数中添加
**/
HAL_UARTEx_ReceiveToIdle_IT(&huart1, rxbuf_uart, sizeof(rxbuf_uart));//初始化串口
Hcsr04Init(&htim2, TIM_CHANNEL_4); //超声波模块初始化
Hcsr04Start(); //开启超声波模块测距
/**
while循环中添加
**/
printf("distance:%.1f cm\r\n", Hcsr04Read());
Hcsr04Start();
Delay_ms(2000); // 测距周期2000ms
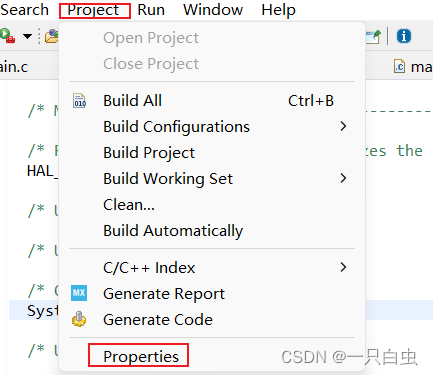
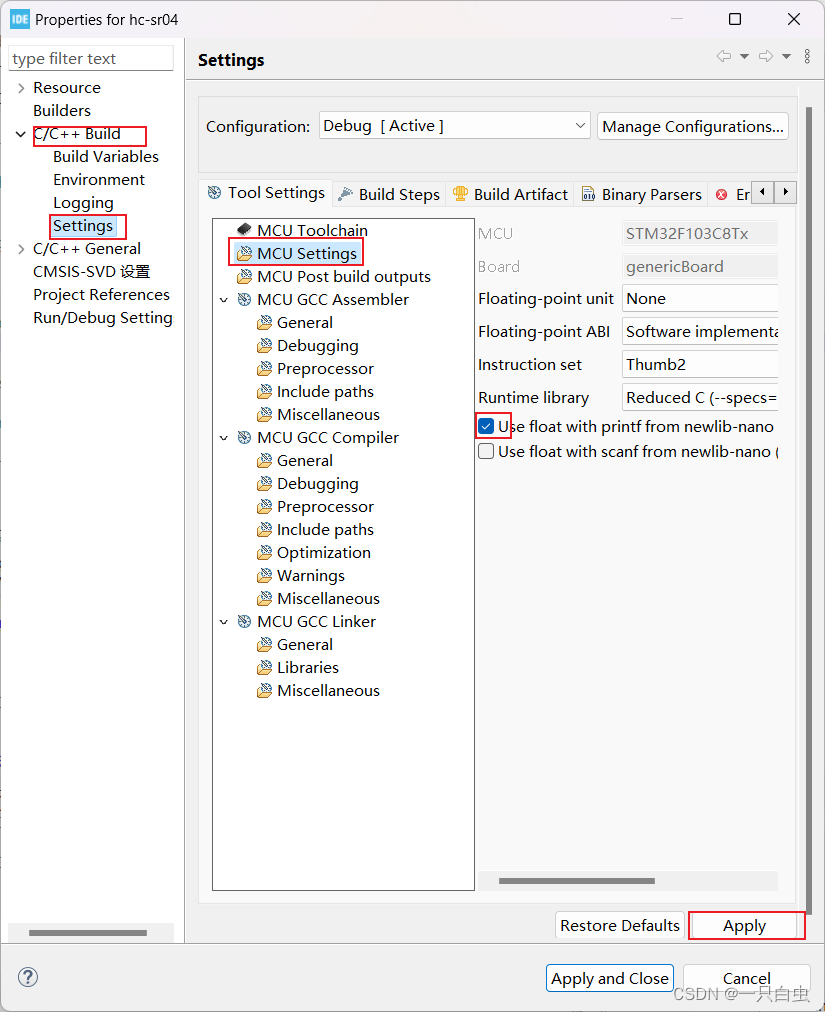
printf输出float报错解决
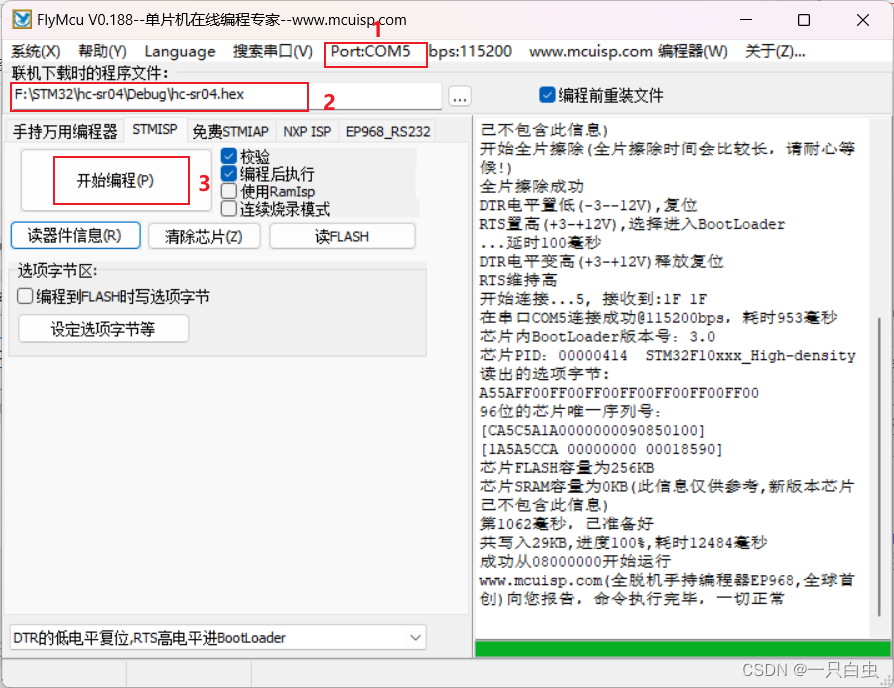
三、完成烧录
完成设置生成.hex文件

利用Ctrl+B完成编译

进行烧录
 结果展示
结果展示














 7838
7838











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









