






最近在使用并级PID控制倒立摆,使用板子上的按键调整PID参数。按钮按久了真的不舒服,想用无线串口与Python通讯实现键盘调参。以下是我研究了一晚上的成果,期间也踩了很多坑,写下来让大家少走点弯路。
1. 实现工具
软件:Python3.9.5
库: pyserial msvcrt time
2.库安装
注意要安装pyserial,不要安装成serial。
如果已经有serial库需要卸载掉。
打开控制台,输入以下代码
pip install pyserial
msvcrt 和 time 库是Python自带的,不需要手动安装
3. 避坑指南
1.msvcrt.getch() 该函数将键盘输入的单个字符转化为字节型返回。
所以进行判断时,要将字符转化为字节 b’ ’
if(mesg == b'q'):
2.串口只能以字节的形式通讯,所以只能接受和发送字节型数据(或字节串)
data = com.read() #接收字节型数据
print(data.decode('Ascii'),end='') #以字符型解码输出
com.write(b'q') #发送字节型数据
3.msvcrt.getch() 该函数只能在控制台运行,否则该函数只会返回 b’\xff’
4.Python程序
import serial
import msvcrt
import time
#对键盘输入的字符进行判断,并使用串口发送出去
def send_mesg():
if(mesg == b'q'):
com.write(b'q')
elif(mesg == b'e'):
com.write(b'e')
elif(mesg == b'a'):
com.write(b'a')
elif(mesg == b'd'):
com.write(b'd')
elif(mesg == b'w'):
com.write(b'w')
elif(mesg == b's'):
com.write(b's')
elif(mesg == b' '):
com.write(b' ')
#接收串口收到的数据,并打印出来
def recv_data(): #com.in_waiting 如果接收缓冲区有数据返回1
if(com.in_waiting > 0): #这个判断是为了在每一次输出玩所有信息后进行一次换行
while(com.in_waiting > 0):
data = com.read() #该函数只能一次接受一个字节的信息,该循环持续到读取完所有信息
print(data.decode('Ascii'),end='') #将接受到的数据解码后打印出来
print()
#首先进行串口参数配置 分别是 端口 波特率 字节大小 读取超时限制 停止位
com = serial.Serial(port="COM9", baudrate=115200,
bytesize=8, timeout=1, stopbits=serial.STOPBITS_ONE)
#死循环,进行串口通讯
while(1):
mesg = msvcrt.getch() #获取键盘输入的单个字符
send_mesg()
time.sleep(0.1) #延时0.1秒,等待单片机接受信息并返回数据
recv_data()
5.单片机程序
void uart_ctrl()
{
if(uart_query(UART_2, &uart_buff))
{
switch(uart_buff)
{
case 'q': state_var--; break;
case 'e': state_var++; break;
case 'a': state_scale--; break;
case 'd': state_scale++; break;
case 's': flag_j=1; break;
case 'w': flag_k=1; break;
case ' ':
{
flag_balance = !flag_balance;
if(flag_balance==1) printf("open balance\n");
else printf("close balance\n");
break;
}
}
if(state_var == 6) state_var=1;
if(state_scale == 6) state_scale=1;
if(state_var == 0) state_var=5;
if(state_scale == 0) state_scale=5;
set_debug_var();
if(uart_buff=='q'||uart_buff=='e'||uart_buff=='w'||uart_buff=='s')
{
switch(state_var)
{
case 1: printf("balance_kp: %.2f\n",balance_kp); break;
case 2: printf("balance_kd: %.2f\n",balance_kd); break;
case 3: printf("velocity_kp: %.2f\n",velocity_kp); break;
case 4: printf("velocity_ki: %.2f\n",velocity_ki); break;
case 5: printf("target_angle: %.2f\n",target_angle); break;
}
}
if(uart_buff=='a'||uart_buff=='d')
{
switch(state_scale)
{
case 1: printf("0.01\n"); break;
case 2: printf("0.1 \n"); break;
case 3: printf("1 \n"); break;
case 4: printf("10 \n"); break;
case 5: printf("100 \n"); break;
}
}
}
}
void set_debug_var()
{
static float Scale;
switch(state_scale)
{
case 1: Scale = 0.01; ips200_showstr(130, 1, "0.01"); break;
case 2: Scale = 0.1; ips200_showstr(130, 1, "0.1 "); break;
case 3: Scale = 1; ips200_showstr(130, 1, "1 "); break;
case 4: Scale = 10; ips200_showstr(130, 1, "10 "); break;
case 5: Scale = 100; ips200_showstr(130, 1, "100 "); break;
}
switch(state_var)
{
case 1: change_debug_var(&balance_kp, Scale); ips200_showstr(120,0,"bal_kp"); ips200_showfloat(120,2,balance_kp,4,2); break;
case 2: change_debug_var(&balance_kd, Scale); ips200_showstr(120,0,"bal_kd"); ips200_showfloat(120,3,balance_kd,3,2); break;
case 3: change_debug_var(&velocity_kp, Scale); ips200_showstr(120,0,"vel_kp"); ips200_showfloat(120,4,velocity_kp,4,2); break;
case 4: change_debug_var(&velocity_ki, Scale); ips200_showstr(120,0,"vel_ki"); ips200_showfloat(120,5,velocity_ki,3,2); break;
case 5: change_debug_var(&target_angle, Scale); ips200_showstr(120,0,"tar_ag "); ips200_showfloat(120,6,target_angle,2,2); break;
}
}
void change_debug_var(float *var, float scale)
{
if(flag_sw2 || flag_k==1) *var += scale, flag_k=0;
if(flag_sw1 || flag_j==1) *var -= scale, flag_j=0;
}
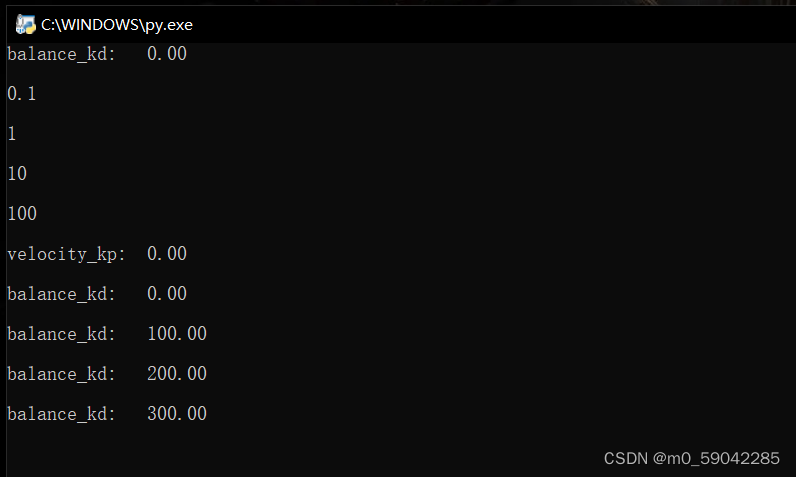
6.效果展示














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









