






本文将深入探讨各类AI Agent的实现原理、实际应用、优势与局限。从简单反射型Agent到多Agent系统,我们将解析这些模型如何赋能自动化流程、决策制定与智能问题求解。
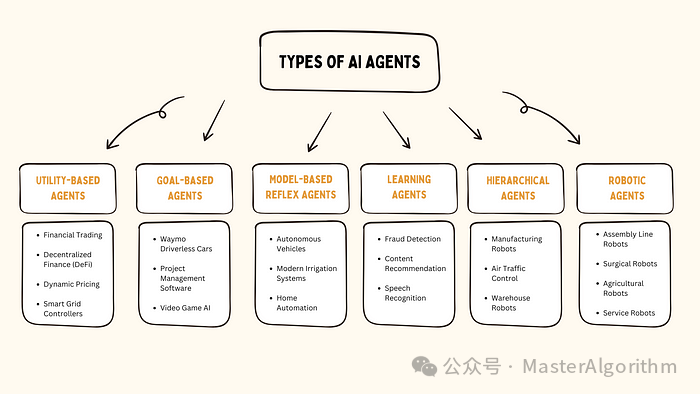
1. AI Agent分类体系
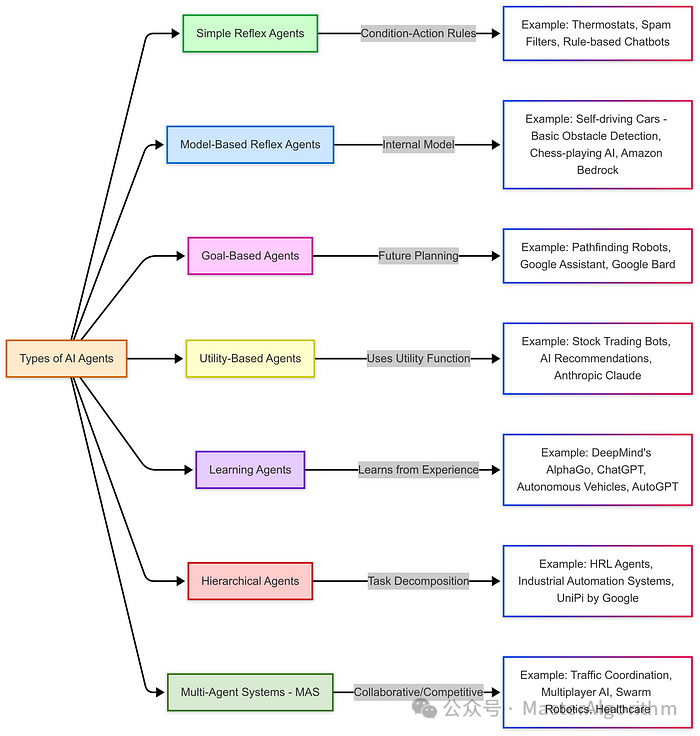
AI Agent可根据其行为对感知智能的影响分为:
- 简单反射型智能体
- 基于模型的智能体
- 目标驱动型智能体
- 效用优化型智能体
- 学习型智能体
- 分层智能体
- 多智能体系统(MAS)
理解每类智能体的特性可优化其行为表现。下面进行详细解析。
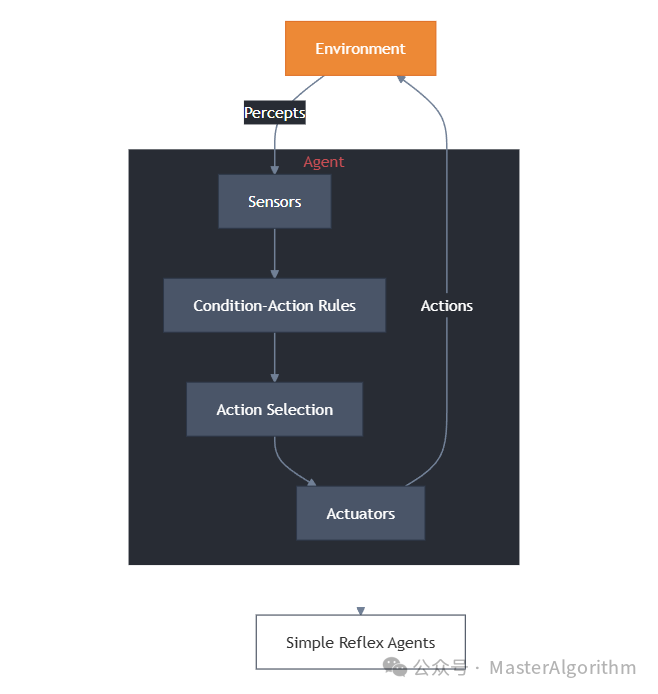
1.1 简单反射型智能体
这类智能体仅对特定条件触发响应,完全依赖预设规则集,不考虑历史经验。适用于无需战略思维的简单任务。
1.1.1 实现原理
class SimpleReflexVacuumAgent: def __init__(self): self.location = "A" self.actions = [] def perceive_and_act(self, current_location, is_dirty): if is_dirty: self.actions.append("Suck") print(f"Cleaned {current_location}") else: if current_location == "A": self.actions.append("MoveRight") self.location = "B" else: self.actions.append("MoveLeft") self.location = "A" print(f"Moved to {self.location}")# Executionagent = SimpleReflexVacuumAgent()percepts = [("A", True), ("A", False), ("B", True), ("B", False)]for loc, dirt in percepts: agent.perceive_and_act(loc, dirt)
运作机制:
- 适用于完全可观测且确定性环境
- 典型案例:
▸ 关键词触发客服机器人
▸ 温控器阈值响应
▸ 工业物联网基础设备
1.1.2 优势
- 开发简单,资源占用低
- 实时响应
- 传感器可靠时稳定性高
1.1.3 局限
- 环境适应性差
- 无记忆存储
- 缺乏学习能力
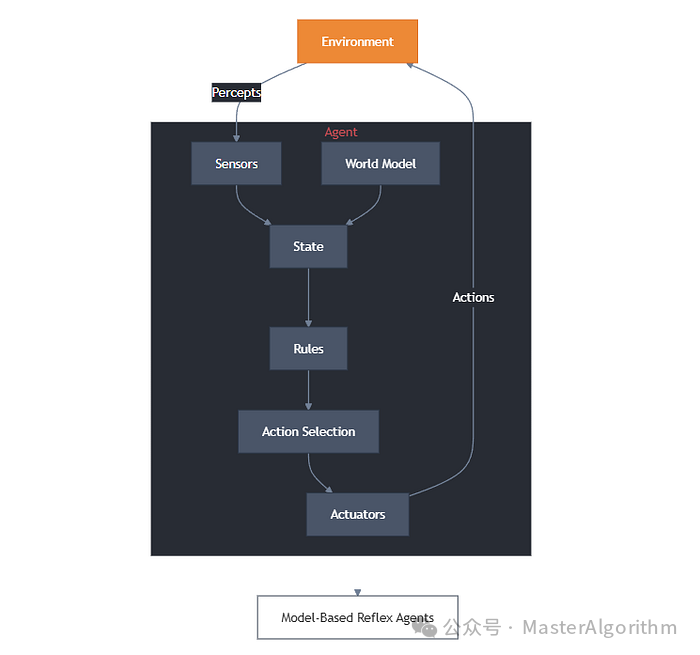
1.2 基于模型型智能体
在反射架构基础上引入内部状态表示,通过环境模型处理部分可观测场景。通过两个维度更新内部状态:
- 环境自主演化
- 智能体行为影响
1.2.1 技术实现
class ModelBasedVacuumAgent: def __init__(self): self.model = {"A": "Unknown", "B": "Unknown"} self.location = "A" def update_model(self, loc, status): self.model[loc] = "Clean" if status else "Dirty" def decide_action(self, current_loc, is_dirty): self.update_model(current_loc, is_dirty) if is_dirty: return "Suck" elif self.model["A"] == "Clean" and self.model["B"] == "Clean": return "Shutdown" else: return "MoveRight" if current_loc == "A" else "MoveLeft"
# Usageagent = ModelBasedVacuumAgent() print(agent.decide_action("A", True)) # Output: Suck
典型应用
- 亚马逊Bedrock平台:
✔ 动态模拟运营场景
✔ 实时数据预测分析
✔ 多目标优化决策
优势表现
- 部分可观测环境适应能力
- 状态记忆功能
- 决策质量提升
- 任务执行优化
技术挑战
- 模型维护成本高
- 计算资源消耗大
- 环境复杂度建模困难
- 需要持续更新迭代
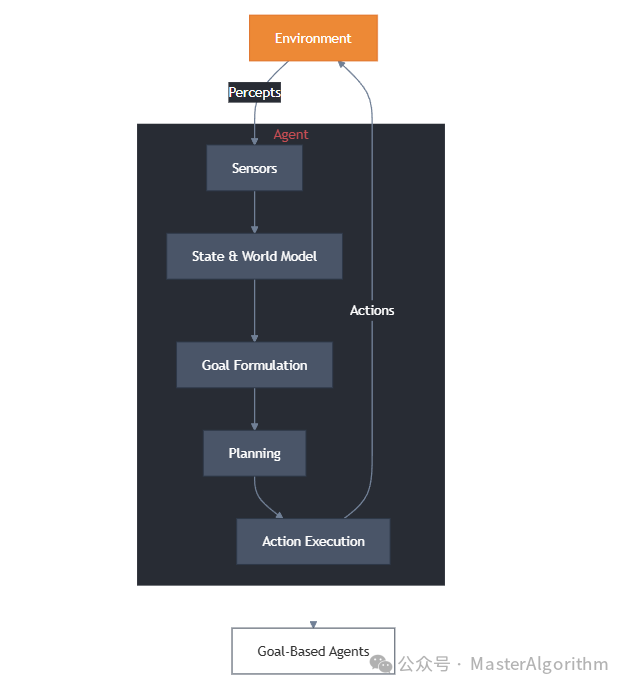
1.3 目标驱动型智能体
目标驱动型智能体是基于目标的AI系统,通过环境信息实现特定目标。与简单反射或基于模型的智能体不同,这类智能体能够制定最优决策序列来完成预定任务。
这类智能体采用搜索算法和启发式方法来寻找达成目标的最有效路径。由于其结构化决策特性,特别适合需要战略规划和动态调整的复杂任务。
1.3.1 技术实现
目标导向行为机制:这类智能体选择最能推进目标实现的行为,通常采用搜索和规划算法。
目标追踪系统:智能体持续评估当前状态与目标的差距,选择能缩小差距的行为。复杂实现可能整合图遍历算法。
class GoalBasedAgent: def __init__(self, target): self.goal = target self.actions = [] def path_planning(self, current_state): # Simplified A* pathfinding logic if current_state == self.goal: return "Goal achieved" return "Move closer" if current_state < self.goal else "Adjust path"
agent = GoalBasedAgent(100)print(agent.path_planning(75)) # Output: Move closer
典型应用场景
目标驱动型智能体特别适合需要结构化规划和动态适应的任务:
🔹自动驾驶系统:智能车辆导航规划,实时调整路线避开障碍
🔹工业机器人:完成复杂装配等需要多步骤协调的任务
🔹计算机视觉与NLP:分析图像、视频和文本并提取关键信息
1.3.2 典型案例:Google Bard
Google Bard作为目标驱动型智能体,旨在为用户提供精准优质的答复,选择最能满足用户需求的行为。虽然它也具有学习能力,但其目标导向特性确保响应始终符合用户需求。
优势特点
- 实现简单直观
- 目标达成效率高
- 性能评估明确
- 可与其他AI技术结合
- 适合结构化环境
- 应用场景广泛
局限性
- 目标单一性限制
- 环境变化适应能力有限
- 复杂多变量任务处理不足
- 需要专业领域知识定义目标
1.4 效用优化型智能体
效用优化型智能体是基于价值判断的AI决策系统,通过效用函数(衡量结果优劣的标准)来选择最优行为。不同于规则驱动或目标驱动的智能体,这类智能体能够评估多种可能行为,选择预期效用最高的方案,实现更灵活智能的决策。
这类智能体特别适合复杂多变环境下需要权衡多种因素的优化决策。 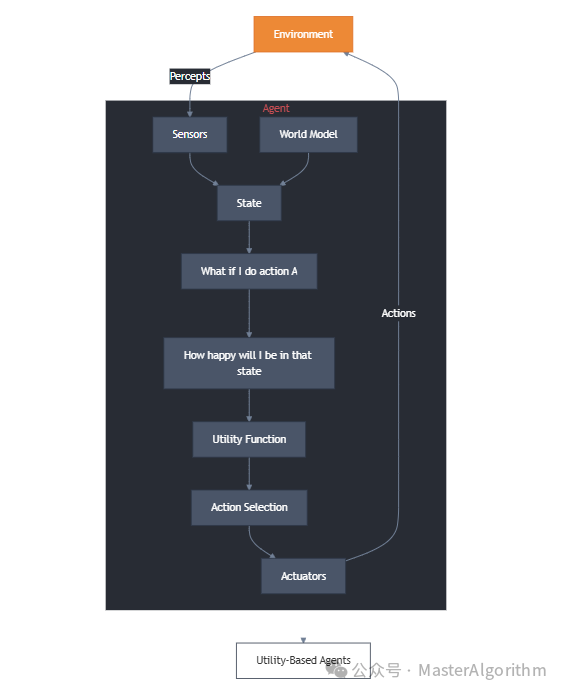
1.4.1 技术实现
量化决策机制:采用效用函数评估行为结果,优化预期价值而非简单达成目标。
优化逻辑:效用函数整合多因素为单一指标,实现不同性质结果的比较。
def utility_function(cost, time, risk): return (0.5 * (1/cost)) + (0.3 * (1/time)) - (0.2 * risk)
actions = [ {"cost": 200, "time": 5, "risk": 0.1}, {"cost": 300, "time": 3, "risk": 0.2}]best_action = max(actions, key=lambda x: utility_function(x['cost'], x['time'], x['risk']))print(f"Optimal action: {best_action}")
决策流程
效用优化型智能体遵循结构化决策过程:
1.环境建模:构建从简单到复杂的环境表示
2.效用评估:使用概率分布和预定义效用函数计算各结果的预期效用
3.决策执行:选择预期效用最高的行为
4.持续优化:动态适应环境变化
典型应用
这类智能体广泛应用于优化决策场景:
🔹资源分配:优化计算资源、带宽或资金的分配方案
🔹排程规划:基于约束条件选择最佳时间安排
🔹推荐系统:平衡预算与时间推荐最优机票
🔹游戏AI:策略类游戏的智能决策
1.4.2 典型案例:Anthropic Claude
Anthropic Claude是帮助用户最大化信用卡收益的效用优化型智能体。
工作原理:
- 为不同用户行为(消费、还款等)分配效用值
- 比较各场景下的可能行为,基于效用值权衡利弊
- 采用启发式方法和AI技术提升决策效率
通过持续选择预期效用最高的行为,Claude确保用户获得最佳财务收益。
优势特点
- 适应不确定性环境
- 多方案比较选择
- 决策灵活可变
- 持续优化改进
技术挑战
- 依赖精确环境建模
- 计算复杂度高
- 伦理因素考量不足
- 决策过程可解释性差
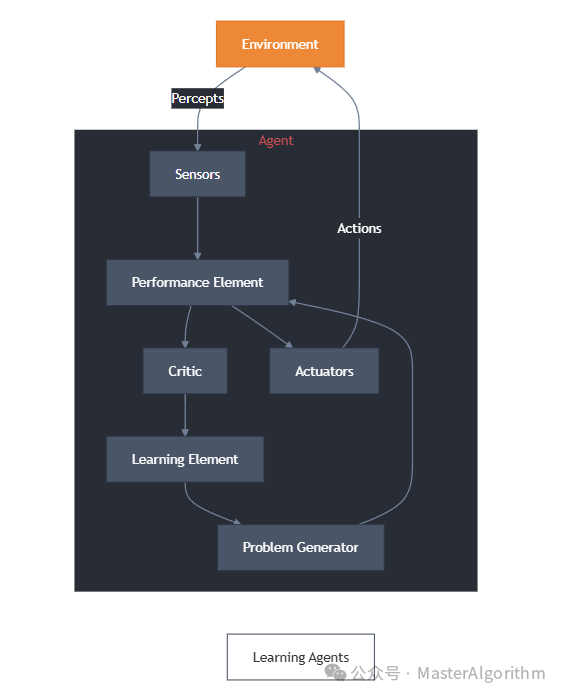
1.5 学习型智能体
学习型智能体是具备持续进化能力的AI系统,通过历史经验不断优化决策策略。这类智能体整合了机器学习算法,其核心架构包含四大组件:
- 学习模块:负责算法训练和性能优化
- 评价模块:提供行为效果的反馈评估
- 执行模块:将学习成果转化为实际操作
- 问题生成器:主动探索新的学习场景
1.5.1 技术实现
自适应学习机制:采用Q-learning算法,通过奖励机制动态调整行为策略。
import numpy as np
class QLearningAgent: def __init__(self, states, actions, alpha=0.1, gamma=0.9): self.q_table = np.zeros((states, actions)) self.alpha = alpha self.gamma = gamma def learn(self, state, action, reward, next_state): max_future_q = np.max(self.q_table[next_state]) current_q = self.q_table[state, action] new_q = (1 - self.alpha) * current_q + self.alpha * (reward + self.gamma * max_future_q) self.q_table[state, action] = new_q
# Initialize agent with 5 states and 4 actionsagent = QLearningAgent(5, 4)agent.learn(1, 2, 10, 3)
典型应用
- 电商推荐系统:根据用户行为持续优化推荐策略
- 工业预测性维护:通过设备数据学习故障模式
- 金融风控系统:动态更新欺诈检测模型
1.5.2 典型案例:AutoGPT
AutoGPT展示了学习型智能体的典型工作流程:
1.接收用户指令(如"调研十大智能手机")
2.自主分解任务并执行多轮数据收集
3.通过子智能体验证信息来源可靠性
4.生成结构化分析报告
优势特征
- 持续性能提升
- 环境适应性强
- 可处理不确定性
- 支持复杂决策
技术挑战
- 训练数据质量依赖
- 计算资源消耗大
- 决策过程可解释性差
- 潜在偏见放大风险
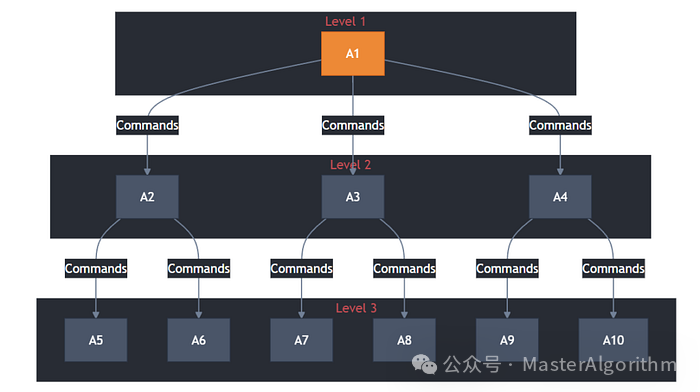
1.6 分层智能体系统
分层智能体采用多级控制架构,通过高层策略与底层执行的协同实现复杂任务管理。这类系统在工业自动化和智能家居领域有广泛应用,其核心特征包括:
-
层级化决策:战略层(长期规划)、战术层(中期协调)、执行层(即时操作)
-
模块化设计:各层级可独立开发测试,通过标准接口通信
-
动态优先级调整:根据任务紧急程度动态分配资源
1.6.1 技术实现
分层架构:分层代理采用多个抽象层,高层处理战略决策,低层管理战术执行。
委派逻辑:主管智能体负责子系统协调,展示了分布式责任架构。
class SupervisorAgent: def __init__(self): self.subagents = { "security": SecurityAgent(), "climate": ClimateAgent() } def coordinate(self, sensor_data): if sensor_data["intruder"]: self.subagents["security"].activate() else: self.subagents["climate"].adjust(sensor_data["temp"]) class SecurityAgent: def activate(self): print("Security protocols engaged")class ClimateAgent: def adjust(self, temp): action = "Cool" if temp > 72 else "Heat" print(f"Climate system: {action} activated")
# System executionsmart_home = SupervisorAgent()smart_home.coordinate({"intruder": True, "temp": 68})
典型应用场景
- 智能制造:工厂级生产规划→车间调度→设备控制三级协同
- 智慧城市:交通总控→区域协调→路口信号灯实时调控
- 无人机编队:任务规划→队形保持→单机避障分层管理
1.6.2 典型案例:Google UniPi
UniPi通过分层架构实现多模态任务处理:
- 高层策略:解析视频/文本输入生成任务指令
- 底层执行:通过模仿学习完成具体操作步骤
- 中间协调层:处理任务依赖关系和资源冲突
技术优势
- 系统复杂度可控
- 故障隔离性强
- 资源利用率高
- 扩展灵活性好
实施挑战
- 跨层级通信延迟
- 全局状态同步困难
- 动态环境适应性有限
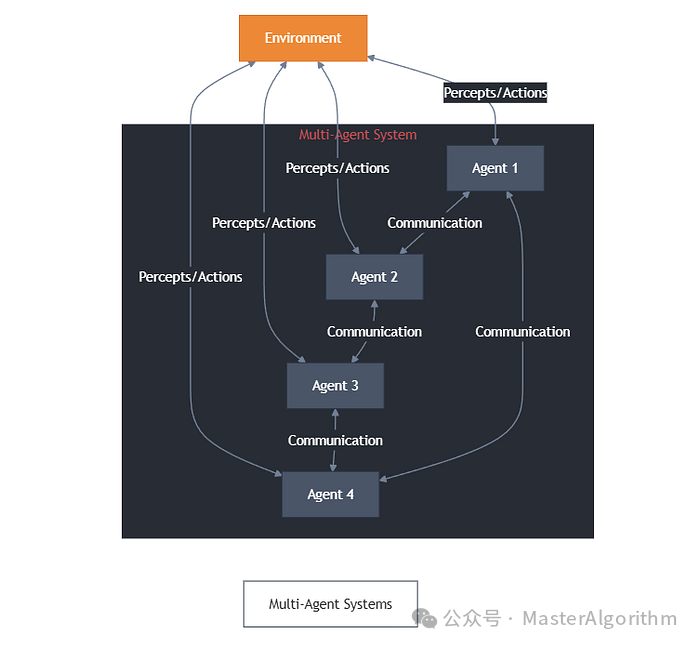
1.7 多智能体系统(MAS)
多智能体系统(MAS)并不完全是一种不同的 AI 智能体。相反,它们是一组相互协调并作为一个单一单元运作的智能体集合。
它可以包括单反射智能体、基于目标的智能体或上述提到的任何其他类型的智能体。
与分层智能体不同,MAS 中的每个智能体都有自己的目标和能力,但它们会与其他智能体互动以实现共同目标或优化个体结果。
MAS是由多个自主智能体组成的协作网络,其核心特征包括:
- 分布式决策:无中心控制节点,决策在多个代理之间分布
- 协商/竞争机制:根据场景,代理可以协作或竞争;合同网协议/拍卖算法等
- 专业:个体智能体可以专注于系统内的特定任务。
- 可扩展性:它们可以通过分配工作负载来处理大规模问题。
- emergent behavior :群体智能涌现
1.7.1 典型架构
class HealthcareSystem: def __init__(self): self.agent_group = [ DiagnosticExpert(), ImagingAnalyst(), Pharmacist(), CareCoordinator() ]
def process_case(self, patient_data): task_queue = []
for agent in self.agent_group: proposal = agent.submit_proposal(patient_data) task_queue.append((proposal.priority, proposal))
# Sort tasks by priority (high to low) task_queue.sort(reverse=True)
for _, task in task_queue: task.execute()
行业应用
- 智慧物流:货车+无人机+仓储机器人协同配送
- 金融交易:做市商+风控+清算智能体实时交互
- 智慧医疗:诊断+影像+护理智能体协作会诊
1.7.2 技术突破
- 斯坦福虚拟小镇实验:25个基于GPT的智能体成功模拟人类社交行为
- TransAgents系统:在文学翻译中超越人工翻译质量
系统优势
- 复杂问题分解能力
- 天然容错性
- 资源分布性
- 解决方案多样性
研发难点
- 信用分配问题
- 通信开销大
- 博弈均衡维持
- 可解释性差
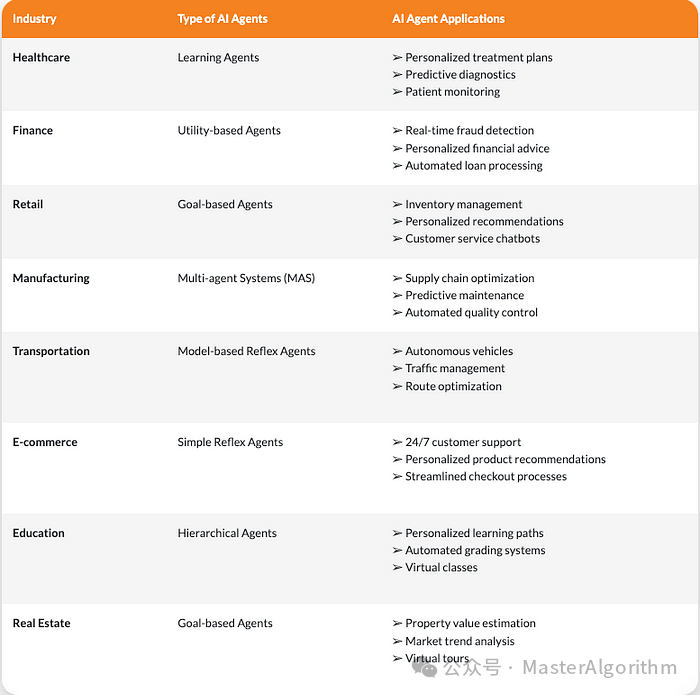
2. 行业转型路线图
现在我们对不同的 AI 代理类型有了更好的了解,让我们看看企业如何通过在各个行业整合这些自主代理来发挥它们的全部潜力。下表展示了 AI 代理在各个行业的应用案例,改变企业运作和为客户服务的方式。
3. 未来展望
随着神经符号计算和量子机器学习的发展,智能体系统将呈现三大趋势:
1.认知增强:结合知识图谱的推理能力
2.具身智能:物理世界交互能力突破
3.社会融合:人机协作伦理框架建立
如何学习大模型 AI ?
由于新岗位的生产效率,要优于被取代岗位的生产效率,所以实际上整个社会的生产效率是提升的。
但是具体到个人,只能说是:
“最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。
这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。

第一阶段(10天):初阶应用
该阶段让大家对大模型 AI有一个最前沿的认识,对大模型 AI 的理解超过 95% 的人,可以在相关讨论时发表高级、不跟风、又接地气的见解,别人只会和 AI 聊天,而你能调教 AI,并能用代码将大模型和业务衔接。
- 大模型 AI 能干什么?
- 大模型是怎样获得「智能」的?
- 用好 AI 的核心心法
- 大模型应用业务架构
- 大模型应用技术架构
- 代码示例:向 GPT-3.5 灌入新知识
- 提示工程的意义和核心思想
- Prompt 典型构成
- 指令调优方法论
- 思维链和思维树
- Prompt 攻击和防范
- …
第二阶段(30天):高阶应用
该阶段我们正式进入大模型 AI 进阶实战学习,学会构造私有知识库,扩展 AI 的能力。快速开发一个完整的基于 agent 对话机器人。掌握功能最强的大模型开发框架,抓住最新的技术进展,适合 Python 和 JavaScript 程序员。
- 为什么要做 RAG
- 搭建一个简单的 ChatPDF
- 检索的基础概念
- 什么是向量表示(Embeddings)
- 向量数据库与向量检索
- 基于向量检索的 RAG
- 搭建 RAG 系统的扩展知识
- 混合检索与 RAG-Fusion 简介
- 向量模型本地部署
- …
第三阶段(30天):模型训练
恭喜你,如果学到这里,你基本可以找到一份大模型 AI相关的工作,自己也能训练 GPT 了!通过微调,训练自己的垂直大模型,能独立训练开源多模态大模型,掌握更多技术方案。
到此为止,大概2个月的时间。你已经成为了一名“AI小子”。那么你还想往下探索吗?
- 为什么要做 RAG
- 什么是模型
- 什么是模型训练
- 求解器 & 损失函数简介
- 小实验2:手写一个简单的神经网络并训练它
- 什么是训练/预训练/微调/轻量化微调
- Transformer结构简介
- 轻量化微调
- 实验数据集的构建
- …
第四阶段(20天):商业闭环
对全球大模型从性能、吞吐量、成本等方面有一定的认知,可以在云端和本地等多种环境下部署大模型,找到适合自己的项目/创业方向,做一名被 AI 武装的产品经理。
- 硬件选型
- 带你了解全球大模型
- 使用国产大模型服务
- 搭建 OpenAI 代理
- 热身:基于阿里云 PAI 部署 Stable Diffusion
- 在本地计算机运行大模型
- 大模型的私有化部署
- 基于 vLLM 部署大模型
- 案例:如何优雅地在阿里云私有部署开源大模型
- 部署一套开源 LLM 项目
- 内容安全
- 互联网信息服务算法备案
- …
学习是一个过程,只要学习就会有挑战。天道酬勤,你越努力,就会成为越优秀的自己。
如果你能在15天内完成所有的任务,那你堪称天才。然而,如果你能完成 60-70% 的内容,你就已经开始具备成为一名大模型 AI 的正确特征了。
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









