







摘要:约束多目标优化问题(CMOP)由于需要同时考虑目标和约束,特别是当约束极其复杂时,处理起来比较困难。最近的一些算法在处理具有简单可行域的CMOP时工作得很好,然而,对于具有复杂可行域的CMOP,大多数算法的有效性显著降低。针对这一问题,本文提出了一种多阶段进化算法,在进化的不同阶段逐一添加约束,并对约束进行处理。具体地说,该算法在初始阶段只考虑了少量的约束条件,可以使种群高效地收敛到具有良好多样性的潜在可行域。随着算法进入后期阶段,在前一阶段获得的解的基础上,考虑更多的约束条件来搜索最优解。此外,还提出了一种根据对无约束Pareto前沿的影响对约束处理优先级进行排序的策略,从而加快了算法的收敛速度。在五个基准测试套件和三个实际应用上的实验结果表明,该算法在处理复杂约束的多目标进化算法时,尤其是在处理复杂约束的问题时,性能优于几种最新的约束多目标进化算法。
文章目录
1 Introduction
CMOP(Constrained multi-objective optimization problems)可以被描述为:
M
i
n
i
m
i
z
e
F
(
x
)
=
(
f
1
(
x
)
,
.
.
.
,
f
m
(
x
)
)
)
s
u
b
j
e
c
t
t
o
x
∈
Ω
g
i
(
x
)
≤
0
,
i
=
1
,
.
.
.
,
p
h
j
(
x
)
=
0
,
j
=
1
,
.
.
.
,
q
\begin{aligned} Minimize\ \ &\mathbf{F}(\mathbf{x})=(f_1(\mathbf{x}),...,f_m(\mathbf{x}))) \\ subject\ \ to \ \ &\mathbf{x}\in \Omega \\ &g_i(\mathbf{x})\le0,i=1,...,p \\ &h_j(\mathbf{x})=0,j=1,...,q \end{aligned}
Minimize subject to F(x)=(f1(x),...,fm(x)))x∈Ωgi(x)≤0,i=1,...,phj(x)=0,j=1,...,q解的约束违反程度为:
C
(
x
)
=
∑
k
=
1
p
max
{
0
,
g
k
(
x
)
}
+
∑
ℓ
=
1
q
∣
h
ℓ
(
x
)
∣
C(\mathbf{x})=\sum_{k=1}^p{\max \left\{ 0,g_k\left( \mathbf{x} \right) \right\}}+\sum_{\ell =1}^q{\left| h_{\ell}\left( \mathbf{x} \right) \right|}
C(x)=k=1∑pmax{0,gk(x)}+ℓ=1∑q∣hℓ(x)∣若解
x
\mathbf{x}
x可行,则
C
(
x
)
=
0
C(\mathbf{x})=0
C(x)=0。
截至目前,解决多目标优化问题的多目标进化算法(MOEAs)主要分为四类:1)基于帕累托支配的进化算法:NSGA-II[11]、SPEA2[50];2)基于分解的进化算法:MOEA/D[46]、MOEA/D-AWA[34];3)基于指标的进化算法:IBEA[49]、AR-MOEA[36];4)混合型进化算法:SRA[24]、Two-Arch[40]。近年来有约束的多目标优化问题(CMOP)逐渐吸引了研究学者的注意,于是一系列求解这类问题的进化算法也被相继提出(CMOEAs),例如基于有约束的帕累托支配的NSGA-II-CDP[11];基于两档案策略的C-TAEA[25];以及基于两阶段搜索的ToP[27]。尽管这些方法在解决有约束多目标优化问题时表现都很不错,但是在一些特殊复杂的约束条件下,比如:离散的可行域和很大的不可行域屏障结合,或仅有狭窄的可行域等情况,并不一定能找到最优解。因此我们提出,如果能够将约束条件分阶段加入求解过程,应该可以使求解更加简单。
遵循这一思想,本文提出了一种求解CMOP问题的多阶段进化算法。该算法将约束处理过程分成多个阶段,逐个阶段地处理约束,而不是将所有约束作为一个整体来处理。这项工作的主要贡献概括如下:
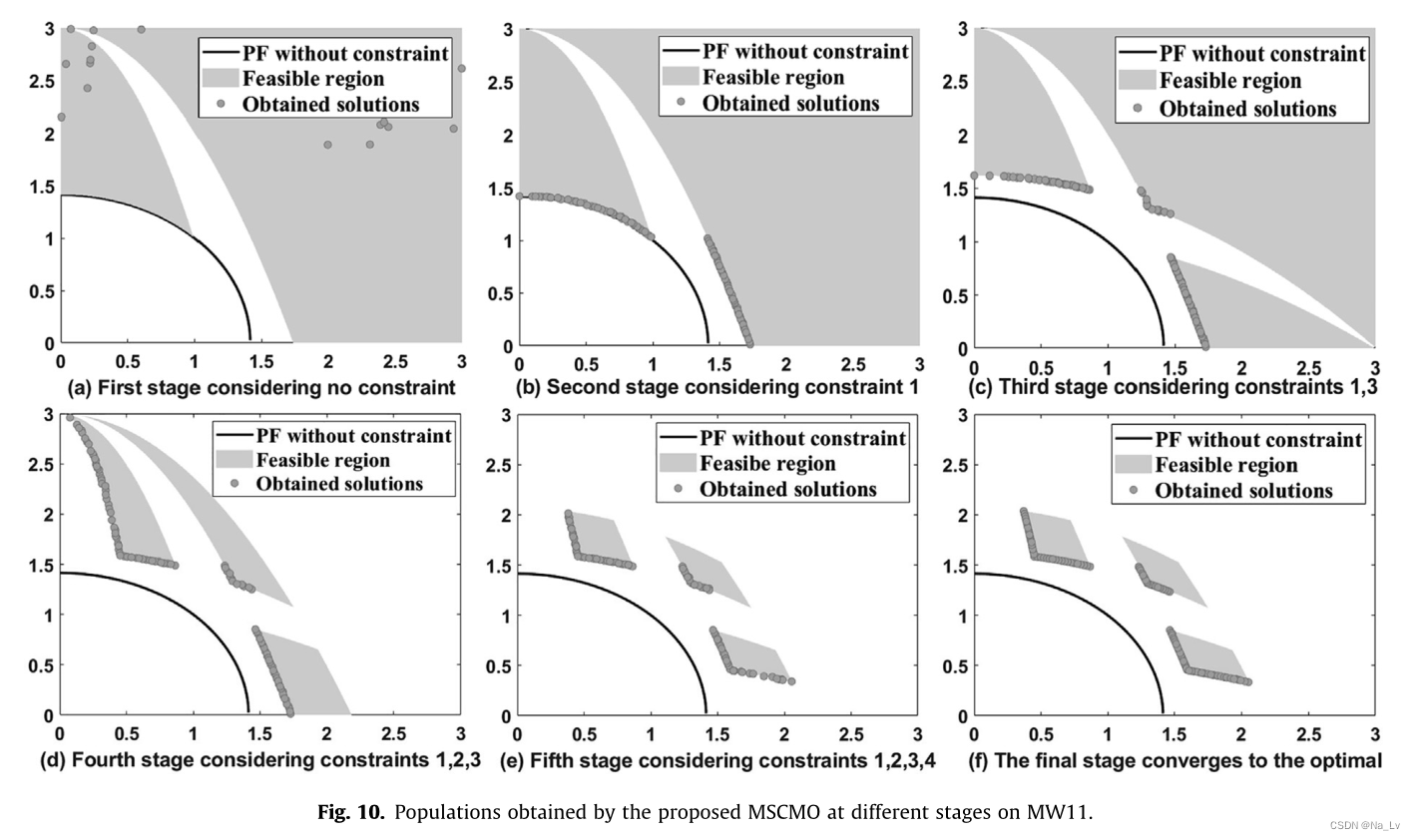
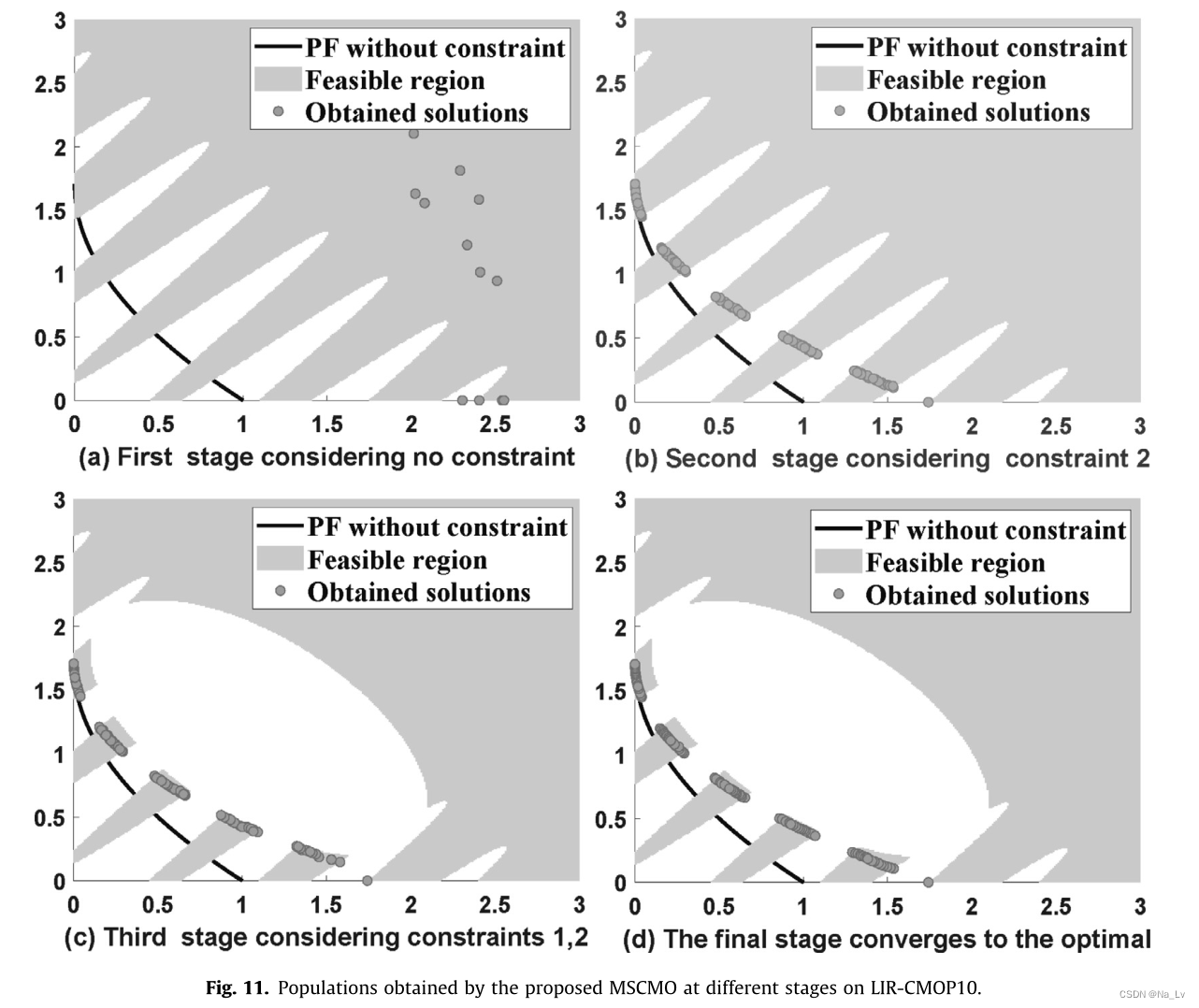
1)提出了一种求解复杂约束条件下CMOP问题的多阶段CMOEA(MSCMO)算法。在该算法中,约束是逐个添加的,并在不同的进化阶段进行处理。在初始阶段,该算法只需处理少量的约束条件,能使种群高效地收敛到具有良好多样性的潜在可行域。对于每个阶段,考虑了更多的约束,并且可以基于在前几个阶段获得的解更容易地处理这些约束。
2)提出了一种根据对无约束Pareto前沿的影响对约束处理优先级进行排序的策略,用于确定每个阶段需要处理的约束。在基准CMOP上的实验结果表明,提出的约束处理优先级可以加快算法的收敛速度。
3)在基准CMOP和实际应用上的一系列实验结果表明,我们的算法与现有CMOEAS相比具有很强的竞争力,特别是在具有复杂约束的CMOP上。
2 Related works and motivation
2.1 现有的CMOEAs
一般来说,现有的CMOEA根据它们采用的约束处理技术可以分为四类。
第一类是惩罚函数法。其主要思想是根据个体违反约束的程度来构造惩罚项,通过在目标函数中加入惩罚项,构造了惩罚适应度函数
f
i
t
n
e
s
s
(
x
)
fitness(\mathbf{x})
fitness(x)。然后,用
f
i
t
n
e
s
s
(
x
)
fitness(\mathbf{x})
fitness(x)来评价个体。惩罚函数方法可分为:死刑函数[30]、静态惩罚函数[18]、动态惩罚函数[15]和自适应惩罚函数[26,35,19]。其中,自适应惩罚函数具有更好的性能,因为它可以利用搜索过程中的反馈信息来动态调整参数。文[26]将惩罚函数与粗糙集理论相结合,根据个体违反约束的情况自适应调整惩罚系数。文献[35]提出了一种新的基于模糊规则的罚函数方法,用于求解约束优化问题,该问题使用模糊推理系统自适应地确定罚函数的值。文[19]将偏好转化为进化多目标优化的约束条件,并采用基于罚函数法的约束支配原则处理约束条件。
第二类是将目标和约束分开。具体地说,这一类可以分为三类:可行性规则、随机排序法和
ϵ
\epsilon
ϵ-约束方法。对于可行性准则,可行解优于不可行解。Deb在[7]中提出的可行性规则CDP是最流行的约束处理技术之一,在以下三个条件下,一个解
x
\mathbf{x}
x被认为优于另一个解
y
\mathbf{y}
y:
1.
x
\mathbf{x}
x可行而
y
\mathbf{y}
y不可行;
2.
x
\mathbf{x}
x和
y
\mathbf{y}
y都可行,但
x
\mathbf{x}
x的目标函数值由于
y
\mathbf{y}
y;
3.
x
\mathbf{x}
x和
y
\mathbf{y}
y都不可行,但是
x
\mathbf{x}
x的约束违反程度低于
y
\mathbf{y}
y。
在[29]中,每个解的一个新的适应度函数被定义为两种排序的加权和:一种是基于CDP的解的排序,另一种是基于Pareto支配的解的排序。在[45]中,随机排序方法中的概率参数Pf可以随着种群在差异进化(DE)框架下的演化而动态变化。
ϵ
\epsilon
ϵ-约束方法提供了对不可行解的松弛。对于约束违约度小于
ϵ
\epsilon
ϵ-的个体,其解被认为是可行的。反之,对于违反约束程度大于
ϵ
\epsilon
ϵ-的个体,则认为解是不可行的。
ϵ
\epsilon
ϵ-Constraint方法的关键是
ϵ
\epsilon
ϵ的值。已经设置好了。在[12]中,算法根据当前种群中可行解占总解数的比例动态调整
ϵ
\epsilon
ϵ的取值,适用于不可行域较大的CMOP。在文[23]中,通过设置不同的
ϵ
\epsilon
ϵ在不同时间取值,以平衡收敛性、多样性和可行性。在[48]中,如果种群的可行比例小于阈值
α
\alpha
α,则
ϵ
\epsilon
ϵ的值逐渐减小,否则将其设置为种群个体间的最大约束违反程度,并提出了一种检测和逃逸策略,帮助种群摆脱局部最优。
第三类是多对象化方法。其思想是将约束视为附加目标,将约束优化问题转化为多目标优化问题。文献[2]提出了一种可行比控制技术,并将其与多目标方法相结合,使搜索可行域与不可行域达到了较好的平衡。在[47]中,提出了一个三目标进化框架,该框架设计了收敛、多样性和解决约束多目标问题的可行性三个指标。
最后一类是杂交法。该方法结合了多种不同的约束处理技术来处理约束问题。在[42]中,提出了一种自适应权衡模型,将种群演化过程分为三种情况,即种群中只有可行解、种群中只有不可行解、种群中既有可行解又有不可行解。在[42]中,针对不同的进化情况设计了不同的个体比较和选择标准。在[22]中,针对环境选择问题设计了一种新型的选择进化策略。首先,从整个父代和子代种群中剔除违反约束较大的个体,并选择所有非劣势个体来获得下一代。然后,如果非劣势个体的数量小于种群规模,则使用惩罚函数方法来选择剩余的个体。
近年来,也发展了一些多阶段或多种群的CMOEA来解决CMOP问题。在文[31]中,提出了一个求解带有欺骗约束的CMOP问题的两阶段协同进化框架。第一阶段采用两个子群:一个用于探索可行区域,另一个用于探索整个空间。第二阶段以这两个子种群为初始种群,寻找Pareto最优解。这两个阶段可以根据进化过程中发现的信息进行切换。在[14]中,提出的PPS框架将搜索过程分为两个不同的阶段:推和拉搜索阶段。在推的阶段,采用多目标进化算法搜索搜索空间,不考虑任何约束条件,快速穿越不可行域,逼近无约束的Pareto前沿。在拉的阶段,考虑了这些约束条件,以帮助种群回到真正的帕累托前沿。在[27]中,还提出了一个称为ToP的两阶段框架。首先,第一阶段只考虑单目标和所有约束,从而将原始的CMOP问题转化为有约束的单目标优化问题来寻找最有希望的可行域。然后,在第二阶段,考虑所有的约束和目标,以获得最终的解。在[39]中,提出了一种两阶段进化算法,在进化过程中调整适应度评估策略,以自适应地平衡目标优化和约束满足。在第一阶段,目标对到达所有可行域的约束给予相同的优先级。在第二阶段,目标优先于沿着可行边界使解决方案多样化的约束条件。在[41]中,提出了一种用于约束多目标优化的协作DE框架CCMODE,该框架包括用于约束单目标优化的M个子种群和用于约束M目标优化的档案种群。在文献[25]中,提出了一种求解约束多目标优化问题的两档进化算法C-TAEA。面向收敛的档案(CA)旨在优化约束和目标,旨在将种群推向帕累托前沿,而面向多样性的档案(DA)则进化为优化目标,旨在探索CA未充分开发的区域,包括不可行的区域。CCMO[38]也是一种进化算法,它进化两个种群。该框架通过进化一个种群来解决原CMOP问题,以保持可行性和收敛,同时进化另一个种群来解决由原问题衍生的辅助问题,以保持多样性。
2.2 写作动机
尽管已有许多约束多目标进化算法被用于求解CMOP问题,并取得了很好的效果,但大多数算法在处理复杂约束的CMOP问题时面临困难。通常,现有的大多数约束优化问题都有多个约束[27,12],这些不同的约束协同形成一个复杂的约束景观。例如,可行区域可以是狭窄和离散的,也可以是巨大的不可行障碍。
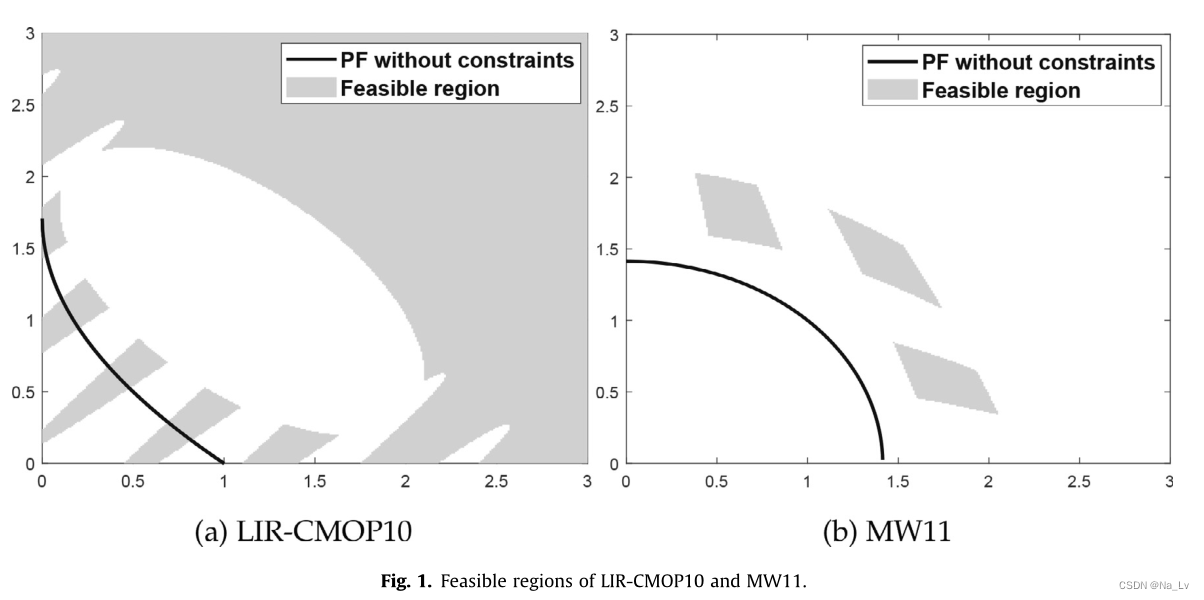
基于已有算法的对比,我们有两个重要的观察结果:首先,一个狭窄的可行域会给寻找可行方案带来困难。其次,离散的可行域会导致局部最优。但是,如果单独处理前面提到的复杂约束,它们就不再被认为是复杂的。基于这种思想,本文逐一考虑约束条件,将求解CMOP问题的过程分成多个阶段。具体而言,该算法从只处理一个约束开始,然后在每个阶段逐步考虑更多的约束。这样,就可以很容易地解决原来复杂的CMOPS问题。在下一节中,将描述拟议的MSCMO的程序。
3 The proposed algorithm
3.1 MSCMO的概述
总流程伪代码:
输入:
n
n
n(种群大小)、
λ
\lambda
λ(阶段变换的阈值参数)、
A
r
c
h
i
v
e
Archive
Archive(储存解的外部档案)
输出:
P
P
P(最终种群)
首先,决定约束条件的优先顺序:
C
H
P
=
C
o
n
s
t
r
a
i
n
t
_
P
r
i
o
r
i
t
y
_
D
e
t
e
r
m
i
n
a
t
e
(
n
,
λ
)
CHP = Constraint\_Priority\_Determinate(n,\lambda)
CHP=Constraint_Priority_Determinate(n,λ)
种群初始化:
最初种群记为
P
P
P;
当前阶段的约束条件记为
c
u
r
r
e
n
t
C
o
n
s
t
r
a
i
n
t
currentConstraint
currentConstraint;
种群的适应度为:
F
F
F(这里及以下所有适应度的计算方法采用SPEA2中的方法)
开始循环直至达到最大迭代次数:
繁殖
基于适应度用二进制锦标赛的方法从
P
P
P中选出
n
n
n个亲代记为
P
′
P'
P′
由亲代产生的子代记为
O
f
f
s
p
r
i
n
g
Offspring
Offspring
O
f
f
s
p
r
i
n
g
Offspring
Offspring与
P
P
P共同组成新的
P
P
P
更新外部档案
如果
∣
c
u
r
r
e
n
t
C
o
n
s
t
r
a
i
n
t
∣
>
0
\left|currentConstraint\right|>0
∣currentConstraint∣>0,则
从
O
f
f
s
p
r
i
n
g
∪
A
r
c
h
i
v
e
Offspring\cup Archive
Offspring∪Archive中选择满足约束条件的非支配解储存到
A
r
c
h
i
v
e
Archive
Archive中
环境选择
计算此时种群
P
P
P的适应度
F
F
F。
根据适应度利用截断方法从
P
P
P中选择
n
n
n个解记为
P
P
P。
决定是否进入下一阶段
若
∣
c
u
r
r
e
n
t
C
o
n
s
t
r
a
i
n
t
∣
=
0
\left|currentConstraint\right|=0
∣currentConstraint∣=0(说明当前是第一阶段)
种群在最高优先级的约束条件下不可行解的比例记为
i
f
r
ifr
ifr
若
i
f
r
>
0
ifr>0
ifr>0
则进入下一阶段:加入下一优先级(最高优先级)的约束条件并重新计算种群适应度
否则
∣
c
u
r
r
e
n
t
C
o
n
s
t
r
a
i
n
t
∣
>
0
\left|currentConstraint\right|>0
∣currentConstraint∣>0(不是第一阶段)
计算种群在每个目标函数上的均值改变量,并记最大值为
m
a
x
C
h
a
n
g
e
maxChange
maxChange
若
m
a
x
C
h
a
n
g
e
≤
λ
maxChange\le\lambda
maxChange≤λ
则进入下一阶段:加入下一优先级的约束条件并且重新计算种群的适应度
构建下一阶段的初始种群
若
∣
A
r
c
h
i
v
e
∣
=
n
\left|Archive\right|=n
∣Archive∣=n,则
A
r
c
h
i
v
e
=
P
Archive=P
Archive=P;
若
∣
A
r
c
h
i
v
e
∣
>
n
\left|Archive\right|>n
∣Archive∣>n,则参照SPEA2中的截断方法;
若
∣
A
r
c
h
i
v
e
∣
<
n
\left|Archive\right|<n
∣Archive∣<n,则参照C-TAEA中的DA的更新方法。
输出最终的种群
P
P
P
C
o
n
s
t
r
a
i
n
t
_
P
r
i
o
r
i
t
y
_
D
e
t
e
r
m
i
n
a
t
e
Constraint\_Priority\_Determinate
Constraint_Priority_Determinate伪代码
输入:
n
n
n(种群大小)、
λ
\lambda
λ(阶段变换的阈值参数)
输出:
C
H
P
CHP
CHP
随机初始化的种群记为
P
1
P_1
P1
根据
P
1
P_1
P1可以得到对约束条件优先级的排序
C
H
P
CHP
CHP
计算
P
1
P_1
P1中个体对应的适应度
F
1
F_1
F1
以下循环直至达到最大迭代次数
使用二进制锦标赛方法1根据适应度从
P
1
P_1
P1中选择
n
n
n个亲代组成
P
1
′
P'_1
P1′
P
1
P_1
P1与
P
1
′
P'_1
P1′的子代重新组成
P
1
P_1
P1
重新计算
P
1
P_1
P1的适应度
F
1
F_1
F1
用截断法从
P
1
P_1
P1中选出
n
n
n个解组成
P
1
P_1
P1
计算种群在每个目标函数上改变量,并记最大值为
m
a
x
C
h
a
n
g
e
maxChange
maxChange
若
m
a
x
C
h
a
n
g
e
≤
λ
maxChange\le\lambda
maxChange≤λ
计算种群在每个约束条件下的不可行率为
i
f
r
ifr
ifr
将不可行率按降序排列,将对应的约束条件排序储存到
C
H
P
CHP
CHP中
输出
C
H
P
CHP
CHP
3.2 算法中的关键技术
在这一小节中,我们介绍了所提出的多阶段约束处理技术中的三个关键部分:每个阶段的种群重新初始化,每个阶段的适应度评估,以及从当前阶段到下一阶段的转换条件。
每阶段的种群初始化 需要注意在多阶段进化算法中,每个阶段都要借助之前储存在外部档案中的解重新初始化种群。若
∣
A
r
c
h
i
v
e
∣
=
n
\left|Archive\right|=n
∣Archive∣=n,则
A
r
c
h
i
v
e
=
P
Archive=P
Archive=P;若
∣
A
r
c
h
i
v
e
∣
>
n
\left|Archive\right|>n
∣Archive∣>n,则参照SPEA2中的截断方法2;若
∣
A
r
c
h
i
v
e
∣
<
n
\left|Archive\right|<n
∣Archive∣<n,则参照C-TAEA中的DA的更新方法。
每阶段的适应度计算 使用SPEA2中适应度的计算方法。此外,为了使算法达到更好的性能,我们在不同的阶段使用了不同的约束处理机制。具体地说,在进化的早期阶段,使用基于多目标优化的约束处理机制来处理约束,以获得具有良好多样性的解,其中将当前阶段的约束违反程度作为额外的目标函数,并使用SPEA2中的方法来计算适应值。在最后阶段,综合考虑所有约束条件,采用了基于可行性规则的约束处理机制来加速收敛。
当前阶段转换为下一阶段的条件 如果是第一阶段,则只需要判断当前约束下解集的不可行率大于零,即可进入下一阶段,在后续阶段更新过程中,需要判断种群在每个目标上的变化平均值小于给定的阈值
λ
\lambda
λ时(本文中取
λ
=
0.01
\lambda=0.01
λ=0.01),才能进入下一阶段。第
i
i
i个目标函数上的变化平均值计算方式如下:
f
i
′
(
x
)
=
f
i
(
x
)
−
f
i
min
f
i
max
−
f
i
min
f
i
′
‾
=
∑
x
∈
P
f
i
′
(
x
)
∣
P
∣
\begin{aligned} &f'_i\left( \mathbf{x} \right) =\frac{f_i\left( \mathbf{x} \right) -f_{i}^{\min}}{f_{i}^{\max}-f_{i}^{\min}} \\ &\overline{f'_i}=\frac{\sum_{\mathbf{x}\in P}{f'_i\left( \mathbf{x} \right)}}{\left| P \right|} \end{aligned}
fi′(x)=fimax−fiminfi(x)−fiminfi′=∣P∣∑x∈Pfi′(x)这里
f
i
max
f_{i}^{\max}
fimax、
f
i
min
f_{i}^{\min}
fimin表示种群中关于第
i
i
i个目标函数的最大值和最小值。
3.3 对MSCMO的分析
4 Experimental study
5 Conclusion
本文提出了一种求解具有相对复杂可行域的CMOPS的多阶段CMOEA算法。具体地说,在该算法中,约束是逐个添加的,并在不同的进化阶段进行处理。在算法的早期阶段,只考虑了少量的约束条件,使种群高效地收敛到具有良好多样性的潜在可行域。当算法进入下一阶段时,考虑了更多的约束条件,并通过使用前一阶段的解来保持种群的多样性。这样,原来复杂的问题就迎刃而解了。此外,我们还对约束进行排序和组合,以提高搜索可行解的效率和收敛速度。在实验部分,将提出的算法与几种最先进的CMOEA算法在五个基准测试套件和三个真实应用程序上进行了比较。结果表明,我们提出的算法具有很强的竞争力,特别是对于具有复杂约束的CMOP。
由于该算法具有很强的灵活性和易于实现的特点,因此该算法也适用于求解其他类型的可行域较复杂的CMOP问题。此外,为约束设计更有效的排序和组合策略,以进一步提高效率和效果也是有趣的。例如,我们可以对约束类型进行分类,并一起处理相同类型的约束。
References
[2] R. Jiao, S. Zeng, C. Li, A feasible-ratio control technique for constrained optimization, Information Sciences 502 (2019) 201–217.
[7] K. Deb, An efficient constraint handling method for genetic algorithms, Computer Methods in Applied Mechanics and Engineering 186 (2000) 311–338.
[11] K. Deb, A. Pratap, S. Agarwal, T. Meyarivan, A fast and elitist multiobjective genetic algorithm: NSGA-II, IEEE Transactions on Evolutionary Computation 6 (2002) 182–197.
[12] Z. Fan, W. Li, X. Cai, H. Huang, Y. Fang, Y. You, J. Mo, C. Wei, E.D. Goodman, An improved epsilon constraint-handling method in moea/d for cmops with large infeasible regions, Soft Computing 23 (2019) 12491–12510…
[14] Z. Fan, W. Li, X. Cai, H. Li, C. Wei, Q. Zhang, K. Deb, E.D. Goodman, Push and pull search for solving constrained multi-objective optimization problems, Swarm and Evolutionary Computation 44 (2019) 665–679.
[15] R. Farmani, J.A. Wright, Self-adaptivefitness formulation for constrained optimization, IEEE Transactions on Evolutionary Computation 7 (2003) 445– 455, https://doi.org/10.1109/TEVC.2003.817236.
[18] A. Homaifar, C. Qi, H.Y. Lai, Constrained optimization via genetic algorithms, Transactions of The Society for Modeling and Simulation International -SIMULATION 62 (1994) 242–253, https://doi.org/10.1177/003754979406200405.
[19] Z. Hou, C. He, R. Cheng, Reformulating preferences into constraints for evolutionary multi- and many-objective optimization, Information Sciences 541 (2020) 1–15…
[22] L. Jiao, L. Li, R. Shang, F. Liu, R. Stolkin, A novel selection evolutionary strategy for constrained optimization, Information Sciences 239 (2013) 122–141.
[23] R. Jiao, S. Zeng, C. Li, S. Yang, Y.S. Ong, Handling constrained many-objective optimization problems via problem transformation, IEEE Transactions on Cybernetics (2020) 1–14, https://doi.org/10.1109/TCYB.2020.3031642.
[24] B. Li, K. Tang, J. Li, X. Yao, Stochastic ranking algorithm for many-objective optimization based on multiple indicators, IEEE Transactions on Evolutionary Computation 20 (2016) 924–938.
[25] K. Li, R. Chen, G. Fu, X. Yao, Two-archive evolutionary algorithm for constrained multi-objective optimization, IEEE Transactions on Evolutionary Computation 23 (2018) 303–315.
[26] Chih-Hao Lin, A rough penalty genetic algorithm for constrained optimization, Information Sciences 241 (2013) 119–137.
[30] J.R. McDonnell, R.G. Reynolds, D.B. Fogel, A Survey of Constraint Handling Techniques in Evolutionary Computation Methods, MIT Press, 1995.
[31] C. Peng, H. Liu, E.D. Goodman, A cooperative evolutionary framework based on an improved version of directed weight vectors for constrained multiobjective optimization with deceptive constraints, IEEE Transactions on Cybernetics (2020) 1–13.
[34] Y. Qi, X. Ma, F. Liu, L. Jiao, J. Sun, J. Wu, MOEA/D with adaptive weight adjustment, Evolutionary Computation 22 (2014) 231–264.
[35] C. Saha, S. Das, K. Pal, S. Mukherjee, A fuzzy rule-based penalty function approach for constrained evolutionary optimization, IEEE Transactions on Cybernetics 46 (2016) 2953–2965, https://doi.org/10.1109/TCYB.2014.2359985.
[36] Y. Tian, R. Cheng, X. Zhang, F. Cheng, Y. Jin, An indicator-based multiobjective evolutionary algorithm with reference point adaptation for better versatility, IEEE Transactions on Evolutionary Computation 22 (2018) 609–622.
[37] Y. Tian, R. Cheng, X. Zhang, Y. Jin, PlatEMO: A MATLAB platform for evolutionary multi-objective optimization [educational forum], IEEE Computational Intelligence Magazine 12 (2017) 73–87, https://doi.org/10.1109/MCI.2017.2742868.
[38] Y. Tian, T. Zhang, J. Xiao, X. Zhang, Y. Jin, A coevolutionary framework for constrained multi-objective optimization problems, IEEE Transactions on Evolutionary Computation (2020) 1, https://doi.org/10.1109/TEVC.2020.3004012.
[39] Y. Tian, Y. Zhang, Y. Su, X. Zhang, K. Tan, Y. Jin, Balancing objective optimization and constraint satisfaction in constrained evolutionary multi-objective optimization, IEEE Transactions on Cybernetics (2020), https://doi.org/10.1109/TCYB.2020.3021138.
[41] J. Wang, G. Liang, J. Zhang, Cooperative differential evolution framework for constrained multiobjective optimization, IEEE Transactions on Cybernetics 49 (2019) 2060–2072, https://doi.org/10.1109/TCYB.2018.2819208.
[42] Y. Wang, Z. Cai, Y. Zhou, W. Zeng, An adaptive tradeoff model for constrained evolutionary optimization, IEEE Transactions on Evolutionary Computation 12 (2008) 80–92.
[45] M. Zhang, W. Luo, X. Wang, Differential evolution with dynamic stochastic selection for constrained optimization, Information Sciences 178 (2008) 3043–3074.
[46] Q. Zhang, H. Li, MOEA/D: A multiobjective evolutionary algorithm based on decomposition, IEEE Transactions on Evolutionary Computation 11 (2007) 712–731.
[47] Y. Zhou, M. Zhu, J. Wang, Z. Zhang, Y. Xiang, J. Zhang, Tri-goal evolution framework for constrained many-objective optimization, IEEE Transactions on Systems, Man, and Cybernetics: Systems 50 (2020) 3086–3099, https://doi.org/10.1109/TSMC.2018.2858843.
[48] Q. Zhu, Q. Zhang, Q. Lin, A constrained multiobjective evolutionary algorithm with detect-and-escape strategy, IEEE Transactions on Evolutionary Computation (2020) 1.
[49] E. Zitzler, S. Kunzli, Indicator-based selection in multiobjective, search (2004) 832–842…
[50] E. Zitzler, M. Laumanns, L. Thiele, SPEA2: Improving the strength Pareto evolutionary algorithm for multiobjective optimization, in: Proceedings of the
Fifth Conference on Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems, 2001, pp. 95–100.

















 1642
1642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









