







本课程笔记参考(西湖大学智能无人系统实验室-赵世钰)https://www.bilibili.com/video/BV1sd4y167NS/?spm_id_from=333.337.search-card.all.click
文献引用:S. Zhao, “Mathematical Foundations of Reinforcement Learning”, Tsinghua University Press and Springer Nature Press, 2024
课程介绍
一些推荐书籍(不一定适合初学者)
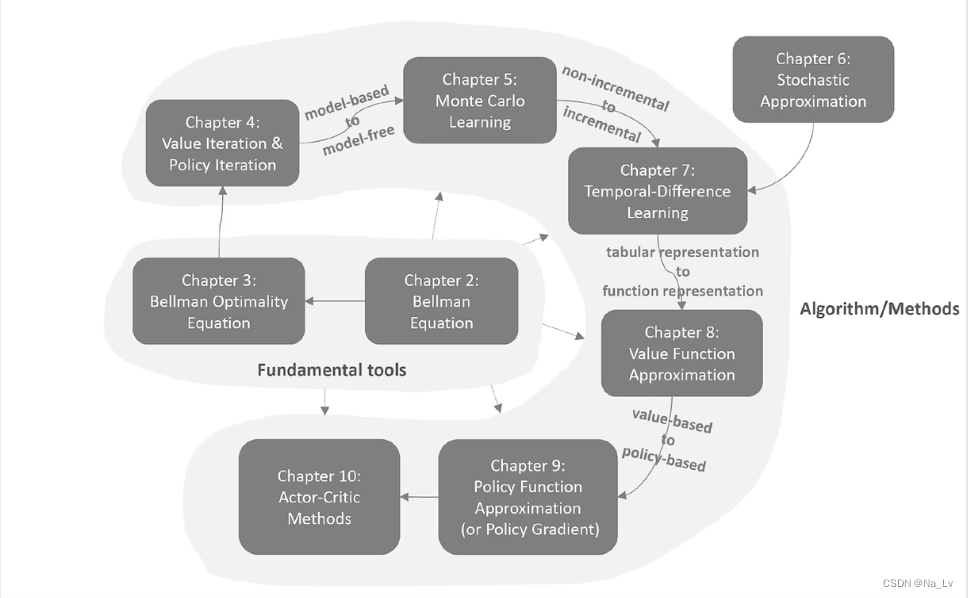
课程安排:
第一课 基本概念
| 概念 | 英文表示 | 字母表示 |
|---|---|---|
| 状态 | State | s i s_i si |
| 状态空间 | State Space | S = { s i } \mathcal{S}=\{s_i\} S={si} |
| 行动 | Action | a i a_i ai |
| 行动空间 | Action Space | A ( s i ) = { a i } \mathcal{A}(s_i)=\{a_i\} A(si)={ai} |
| 状态转移 | State Transition | s 1 → a 1 s 2 s_1 \stackrel{a_1}{\to} s_2 s1→a1s2 |
| 状态转移概率 | State Transition Probability | p ( s 2 ∣ s 1 , a 1 ) \mathcal{p}(s_2 |s_1 ,a_1) p(s2∣s1,a1) |
| 策略 | Policy | π ( a 1 ∣ s 1 ) \pi(a_1|s_1) π(a1∣s1) |
需要注意的是
1、行动空间与状态有关
2、某一状态下采取各个行动的策略概率和为1
3、某一状态和某一行动下,转移后的状态概率和为1
上述定义都是为了描述过程,那么如何体现人与机器的交互呢,引入下列定义:
1、Reword:当采取积极的行动,就给予正向奖励;采取消极的行动,就给予负面惩罚。
(reword以来当前状态和行动,而非下一状态)
2、Trajectory:一个 state-action-reward 链
3、Return:某trajectory得到的所有reword之和
4、Discount Rate :
γ
∈
[
0
,
1
)
\gamma \in[0,1)
γ∈[0,1) (为了解决return无限发散的问题)
5、Discounted Return:考虑Discount Rate后的Return,
γ
\gamma
γ 趋于0则更近视,趋于1则更远视
6、Episode(trial):有Terminal State的Trajectory 【与之相反的是continue tasks】
以上定义基本涵盖了所有后续可能会用到的知识,现在将其应用于一个马尔可夫过程框架中(markov decision process,MDP)
集合:
S
S
S 、
A
(
s
)
A(s)
A(s) 、
R
(
s
,
a
)
R(s,a)
R(s,a)
概率分布:
p
(
s
′
∣
s
,
a
)
\mathcal{p}(s' |s ,a)
p(s′∣s,a)和
p
(
r
∣
s
,
a
)
\mathcal{p}(r|s ,a)
p(r∣s,a)
策略:
π
(
a
∣
s
)
\pi(a|s)
π(a∣s) (在每个状态下动作的概率分布)
马尔可夫性:无记忆性
第二课 贝尔曼公式
首先还是回顾基础定义:

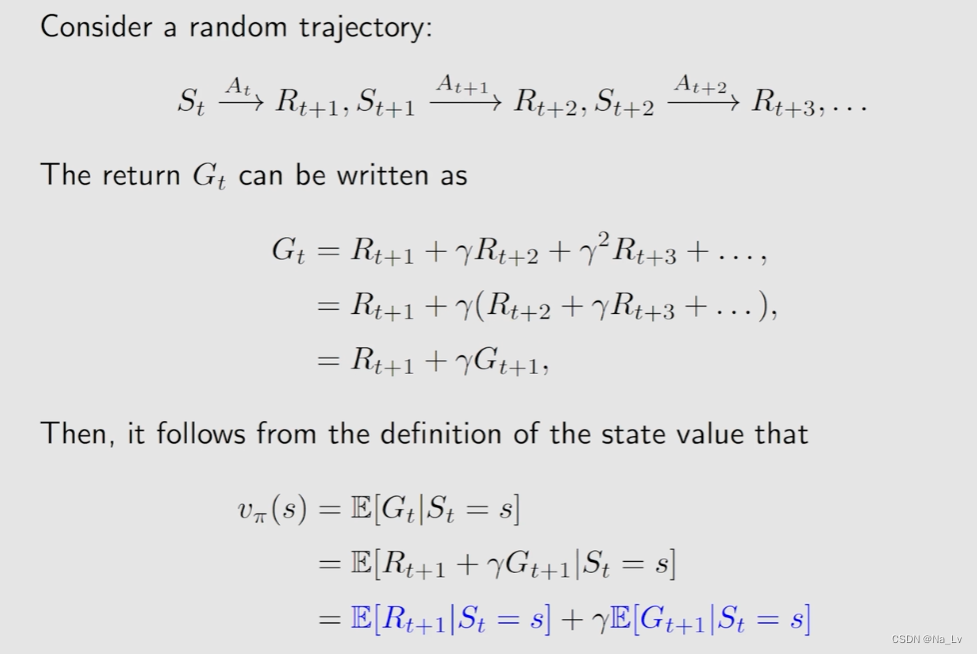
将上述定义应用在多步trajectory中,可以得到:

于是state value 就是
G
t
G_t
Gt的期望值:
v
π
(
s
)
=
E
[
G
t
∣
S
t
=
s
]
v_{\pi}(s)=\mathbb{E}[G_t|S_t=s]
vπ(s)=E[Gt∣St=s]
state value是关于状态
s
s
s和策略
π
\pi
π的函数
▶
\blacktriangleright
▶一个确定的trajectory求得的是return,从某一状态出发可能出现的多个trajectory的return的平均值是state value
下面推导Bellman 公式:

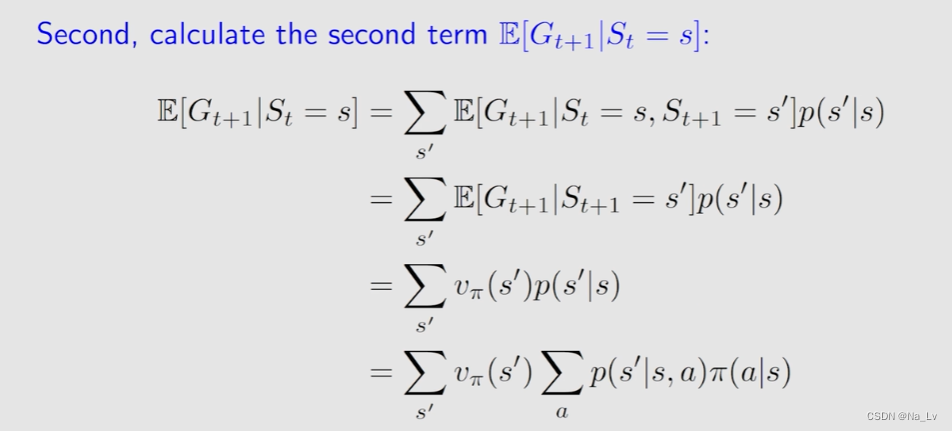
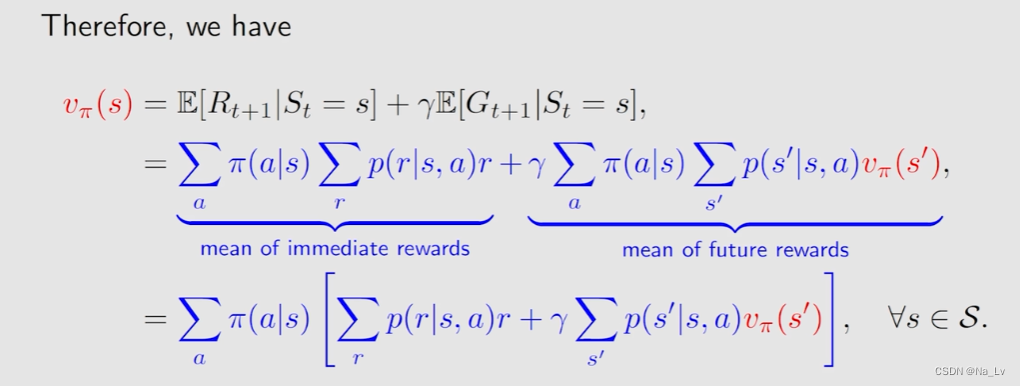
观察上式可以得到相邻状态的state value间的关系,求解思想:BOOTSTRAPPING!
同时为了求解需要已知
π
(
a
∣
s
)
\pi(a|s)
π(a∣s)、
p
(
r
∣
s
,
a
)
p(r|s,a)
p(r∣s,a)和
p
(
s
′
∣
s
,
a
)
p(s'|s,a)
p(s′∣s,a)。
▶
\blacktriangleright
▶一旦求解出
v
π
(
s
)
v_{\pi}(s)
vπ(s),也就相当于评估了策略
π
\pi
π,即policy evaluation。
▶
\blacktriangleright
▶
p
(
r
∣
s
,
a
)
p(r|s,a)
p(r∣s,a)和
p
(
s
′
∣
s
,
a
)
p(s'|s,a)
p(s′∣s,a)表示了动态模型。根据是否已知动态模型,可将问题分为两大类:model-based和model-free,分别会有对应的不同求解算法。
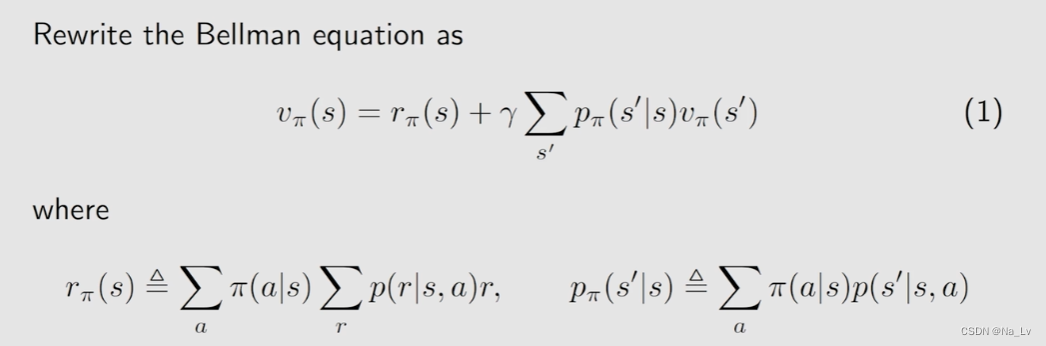
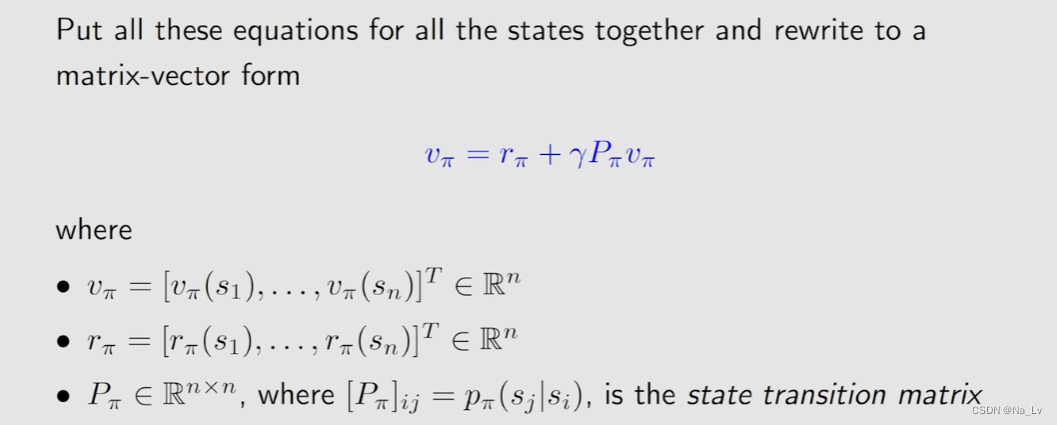
Bellman的矩阵形式
求解Bellman方程
给定一个策略就可以写出其对应的Bellman公式,有Bellman公式就可以求解出State Value,求出State Value就可以用于评价该策略的优劣,所以本质是一个policy evaluation的过程。
不同的策略可以得到相同的state value
方法1:closed form solution
v
π
=
(
I
−
γ
P
π
)
−
1
r
π
v_{\pi}=(I-\gamma P_{\pi})^{-1}r_{\pi}
vπ=(I−γPπ)−1rπ
方法2:iterative solution
v
k
+
1
=
r
π
+
γ
P
π
v
k
v_{k+1}=r_{\pi}+\gamma P_{\pi}v_k
vk+1=rπ+γPπvk
方法2的收敛性证明:

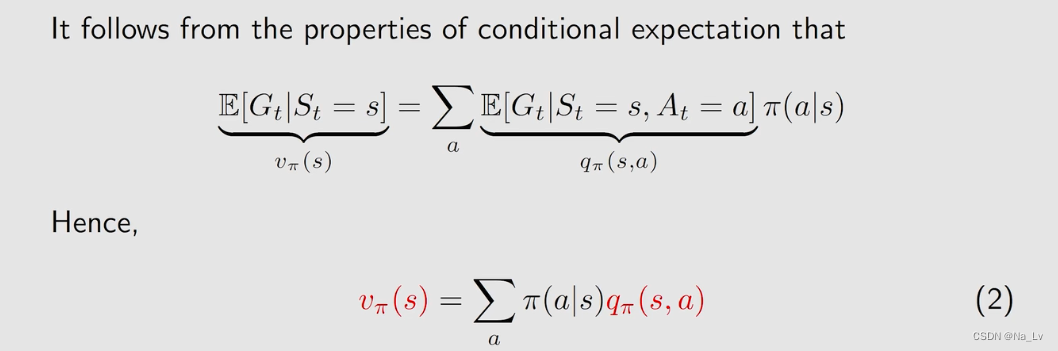
进而引入action value
q
π
(
s
,
a
)
=
E
[
G
t
∣
S
t
=
s
,
A
t
=
a
]
q_{\pi}(s,a)=\mathbb{E}[G_t|S_t=s,A_t=a]
qπ(s,a)=E[Gt∣St=s,At=a]
依赖于状态、动作和策略(同一状态同一动作也会产生不同的下一状态,所以需要求期望)
▶
\blacktriangleright
▶action value 与 state value 的关系:

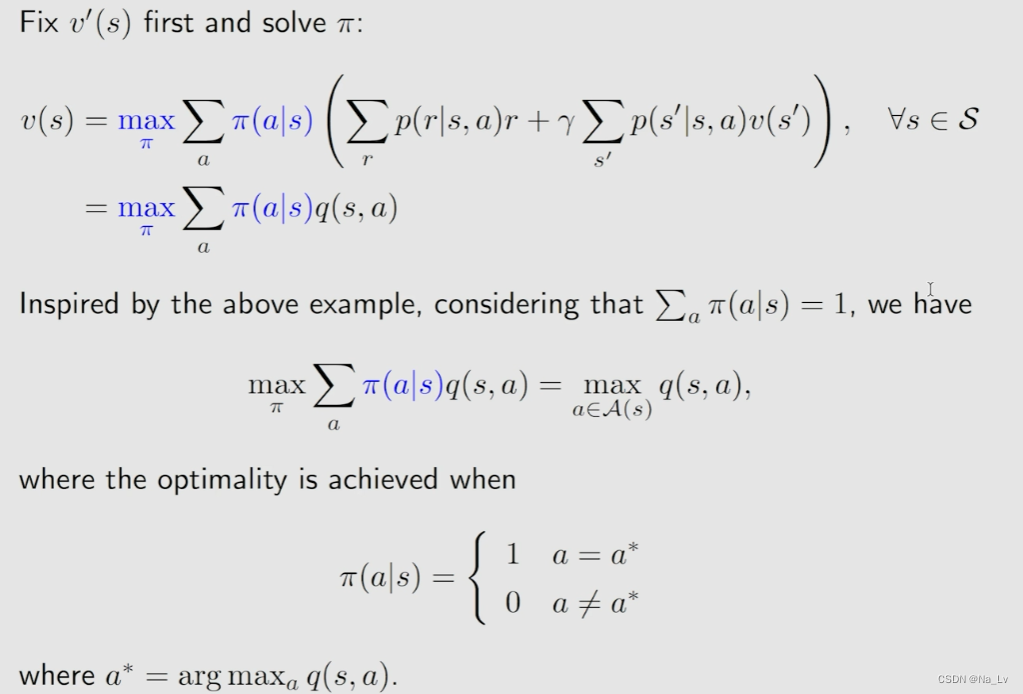
第三课 贝尔曼最优公式
贝尔曼最优公式的形式:

矩阵形式:

针对上式一般假设模型已知(
p
p
p,
r
r
r,
γ
\gamma
γ),
v
(
s
)
v(s)
v(s)和
π
(
s
)
\pi(s)
π(s)未知。即有两个未知数,求解时需先假定一个确定(一般是确定
v
(
s
′
)
v(s')
v(s′),求解
π
\pi
π,即求解每个action对应的
π
(
a
∣
s
)
\pi(a|s)
π(a∣s))
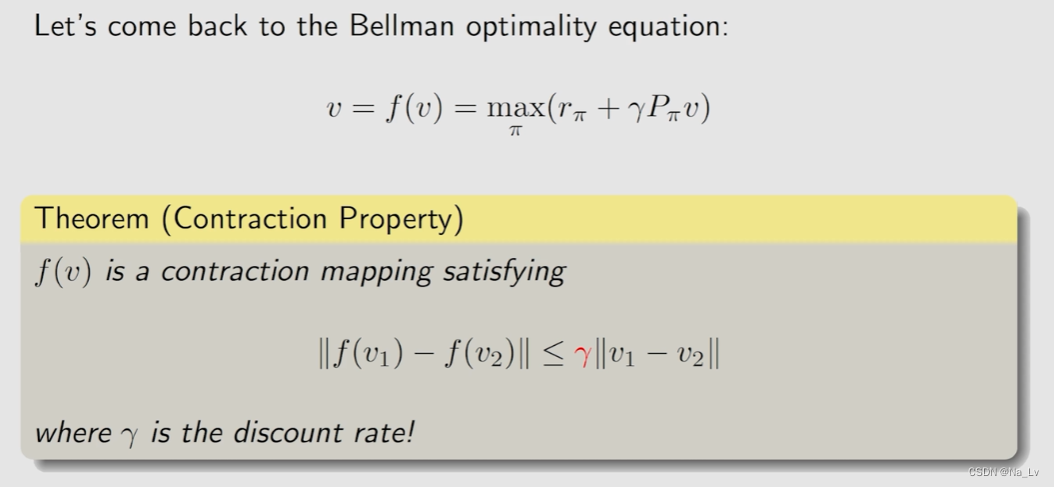
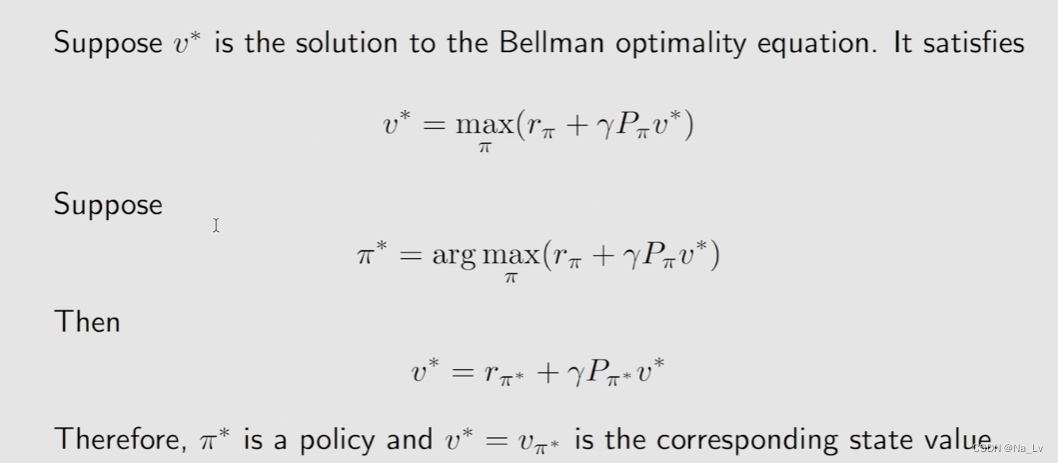
BOE(bellman optimality equation)的求解借助了压缩映射不动点定理:
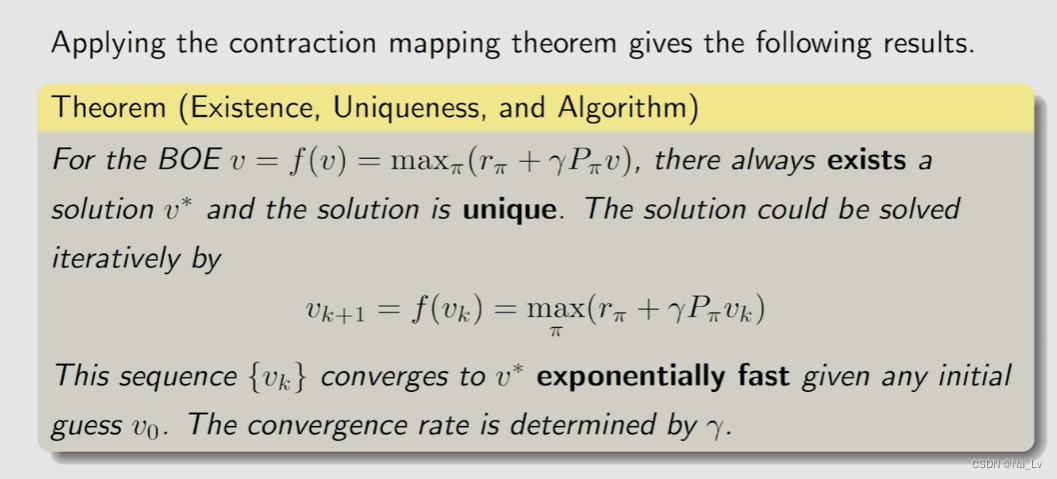
因此可以使用迭代算法求解:
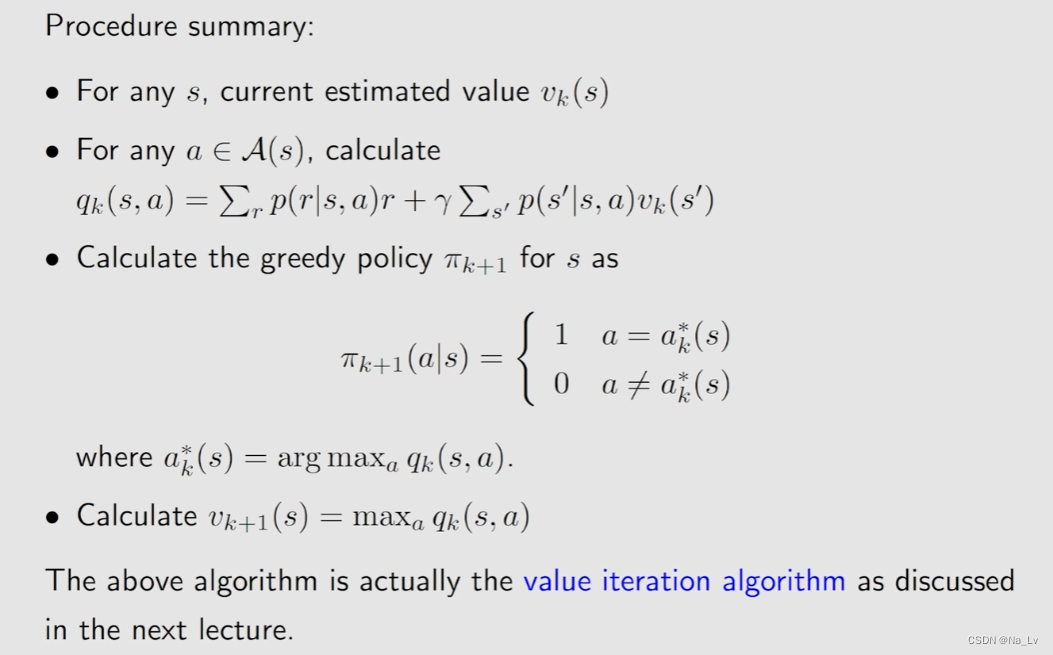
详细的迭代算法写作:
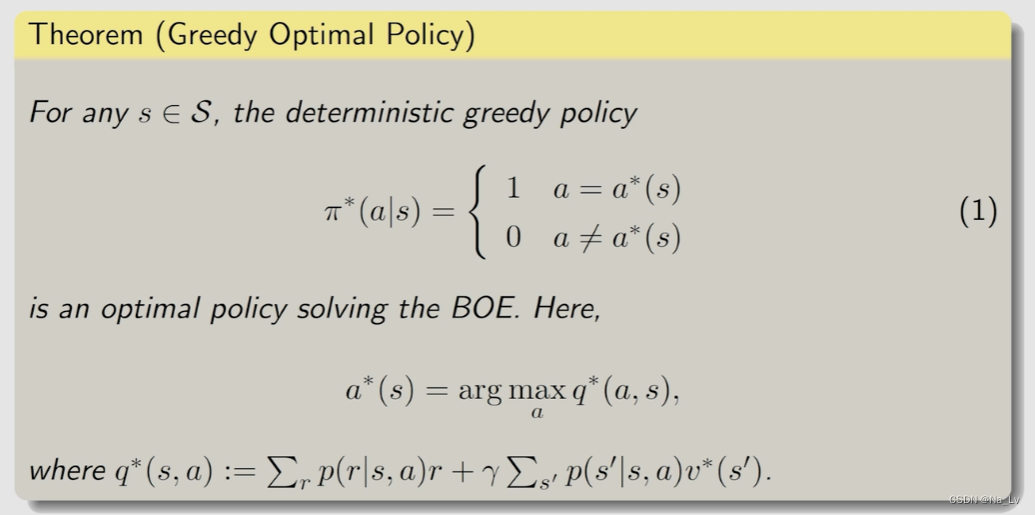
最优性和唯一性:

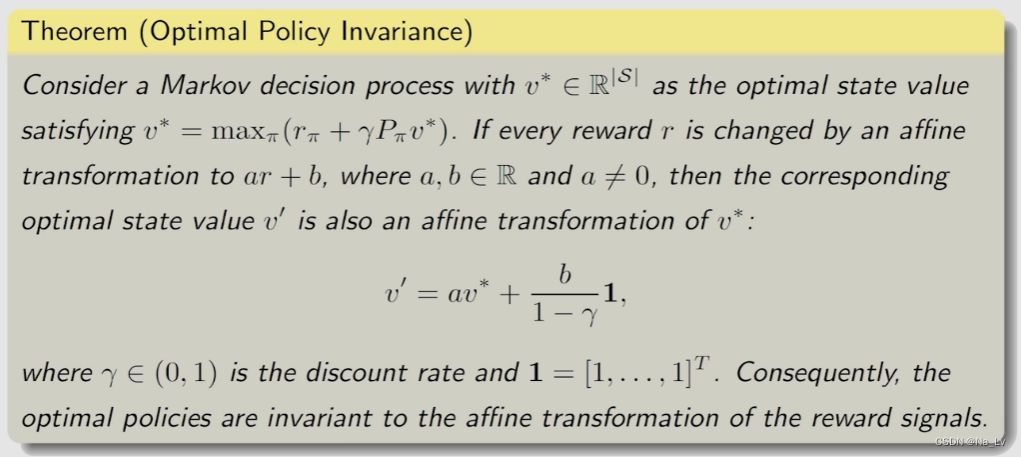
一个推论(说明影响策略的是action value的相对大小,不是绝对大小):















 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









