







动机
(1)共识特征提取中的干扰问题:现有方法在提取图像组的共识特征时,可能会引入与协同显著目标无关的背景信息或噪声。这些无关信息会干扰模型对协同显著目标的准确定位,降低检测性能。
(2)缺乏对共识特征的纯化机制:虽然当前方法关注于挖掘图像组中的共性特征,但缺乏有效的机制来纯化这些特征,去除无关或有害的信息,从而影响协同显著性检测的精度和鲁棒性。
作者提出了协同表示纯化(CoRP)方法,旨在通过迭代纯化共识特征,去除无关信息,提升协同显著性目标检测的准确性和鲁棒性。
摘要
问题1:什么叫做协同显著性物体检测?
协同显著性物体检测(Co-Salient Object Detection, Co-SOD)是一项计算机视觉任务,旨在从一组相关图像中检测并分割出所有图像中共同显著的物体。与单一图像的显著性物体检测(Salient Object Detection, SOD)不同,Co-SOD关注的是多张图像中共享的显著性目标。

问题二:什么叫做挖掘协同表示对于定位协同显著性至关重要?
在协同显著性物体检测(Co-SOD)任务中,要成功检测并定位一组相关图像中的共同显著性物体,核心问题是如何有效提取并表示图像组中的共性特征(协同表示)。
协同显著性物体检测不仅需要关注图像中的显著性,还需要考虑图像组之间的协同特性。这种任务的核心难点在于“共性”和“显著性”的结合:
-
跨图像的协同性:需要对多张图像之间的特征进行对比和对齐,找出哪些特征在多个图像中是一致的。例如,通过注意力机制或特征聚合的方法,将图像之间的共性信息提取出来。
-
抑制干扰:图像中可能存在其他显著但不共享的目标(例如,一张图片中有显眼的树,但其他图片没有)。协同表示可以帮助剔除这些干扰目标。
-
提升检测的鲁棒性:单张图像的显著性物体可能由于背景复杂、光照变化等原因难以检测。通过协同表示,可以利用其他图像中的相关信息来增强检测的准确性和鲁棒性。
如何进行挖掘协同表示?
-
特征提取与对齐:使用深度神经网络(如 CNN 或 Transformer)提取每张图像的特征。通过特征对齐(如特征相似性匹配或特征聚类)来捕捉图像组的共性。
2.组间交互建模:通过交互机制(如多头自注意力、交叉注意力)分析图像组中特征的相关性。例如,计算图像组中特定区域与其他图像区域的相似度。
3.图神经网络(GNN):将图像组视为一个图,节点表示单张图像的特征,边表示图像之间的关系。使用图神经网络建模节点之间的关系,提取图像组的全局协同表示。
4.多尺度特征融合:对图像中的不同层次的特征进行融合(如局部特征和全局特征)。局部特征用于检测显著性区域,全局特征用于识别图像组的共性。
5.显著性优化:通过损失函数设计(如对比损失)强化协同表示的质量,使模型更关注图像组的共性目标。
问题三:什么叫做协同表示纯化?
协同表示纯化(Cooperative Representation Purification, CoRP) 是一种针对协同显著性物体检测(Co-SOD)任务提出的方法,其核心目的是通过去除噪声和无关特征,提取图像组中更为纯净的协同表示,从而更准确地定位协同显著性物体。
CoRP 的工作原理:
-
特征提取:首先,通过预训练的深度神经网络(如 ResNet、Vision Transformer)提取每张图像的初始特征。这些特征可能包含物体显著性特征和背景噪声特征。
-
噪声去除:全局筛选:通过分析图像组中特征的共性,去除那些仅存在于单张图像或局部特征中的无关内容。区域过滤:在显著性区域中进一步细化,将非显著性目标从协同表示中排除。
-
协同特征聚合:交互机制:通过注意力机制或图神经网络(GNN),在图像组中找到跨图像的共享特征。特征对比:通过对比学习,强化协同特征的表达能力,同时减少图像间特征的噪声。
-
动态优化:在训练过程中动态调整协同表示的质量,使其逐渐收敛到无噪声的纯净表示。使用特定的损失函数(如对比损失或一致性损失)来确保最终的表示能够有效区分协同显著性目标和背景噪声。
1介绍
问题一:什么叫做特征聚合?
特征聚合(Feature Aggregation) 是指将来自多个图像的特征信息进行整合、融合的过程,以便更好地建模图像之间的协同性,提取共享的显著性特征。
特征聚合的背景和意义:
1:为什么需要特征聚合?
在协同显著性任务中,我们需要找出图像组中的共同显著性物体。这要求模型不仅能够处理单张图像,还需要综合来自多张图像的特征。
单张图像的特征可能包含局部噪声或缺失信息,依靠单一图像的显著性检测可能无法准确定位协同目标。
通过特征聚合,可以将多张图像的特征结合起来,增强协同表示的质量,抑制噪声,并提高对目标的一致性建模。
2:聚合的目标
跨图像共享特征的强化(例如所有图像中共同的物体)。跨图像个性特征的抑制(例如图像中特有的背景或噪声)。帮助模型更好地定位共同显著性目标,尤其在某些图片中目标模糊或背景复杂的情况下。
特征聚合的常用方法:
(1)基于注意力机制的特征聚合
利用注意力机制(如自注意力或交叉注意力)对特征进行加权,突出重要的协同特征。
自注意力:通过计算单张图像的特征内部的相关性,强化图像内部的显著性区域。
交叉注意力:通过计算不同图像之间特征的相关性,聚合共享的跨图像特征。
例子:使用 Transformer 模型中的多头注意力机制,将图像组的特征编码为一个全局的协同表示。高相关区域的权重更高,低相关区域(噪声)的权重被抑制。
(2)特征对齐与聚合
对齐特征:不同图像的目标可能位于不同的位置或比例。通过特征对齐,可以将不同尺度、位置的特征统一到一个参考坐标系中。
对齐后,将这些特征进行聚合(如加权求和或拼接)。
技术方法:图像注册(Image Registration):调整图像中的目标对齐。全局特征池化:将所有图像的特征汇总为一个全局表示。
(3)图神经网络(GNN)
将图像组中的每张图像表示为一个节点,节点间的边表示图像特征之间的相似性。
通过图神经网络的消息传递机制,聚合节点间的信息,从而得到共享的协同特征表示。
工作流程:1.将每张图像的特征提取为节点表示。2.使用图神经网络进行特征传播。3.经过多轮传播后,聚合节点中的协同特征为全局表示。
(4)基于对比学习的聚合
使用对比学习方法,区分正样本特征(相关协同目标)与负样本特征(无关背景或噪声),聚合正样本特征以强化协同性。
损失函数:通过对比损失(如 InfoNCE 损失),使协同特征更加接近。
(5)多尺度特征融合
在图像中,显著性目标可能分布在不同尺度的区域(如局部特征和全局特征)。
通过多尺度特征融合,可以捕获细粒度(局部显著性)和粗粒度(全局协同性)信息。
方法:使用金字塔特征网络(FPN)。多层卷积特征提取后进行加权融合。
总结:特征聚合是协同显著性物体检测中的核心步骤,它通过整合图像组中的特征信息,帮助模型准确提取共享的显著性目标。无论是基于注意力机制、对比学习、图神经网络还是多尺度特征融合,其目标始终是找到图像间的协同性,并抑制噪声,从而提升协同显著性检测的性能。
问题二:什么叫做聚类?
在协同显著性物体检测(Co-SOD)中,聚类通常是指将图像组中提取的特征或显著性信息分组,以发现和强化共享的特征,从而更准确地识别协同显著性目标。在这个背景下,聚类的目的是利用图像之间的相似性找到跨图像的一致性模式。
聚类在协同显著性中的作用:
1.目的:通过聚类,将相似的显著性区域或特征归为一组,从而突出图像组中共享的显著性物体。通过消除噪声或无关特征,增强协同表示,准确定位目标区域。
2.对象:图像的像素、特征向量、显著性区域,甚至图像的全局表示都可以作为聚类的对象。例如,将图像组中所有的候选显著性区域划分为若干簇,其中一个簇可能对应图像组中的共享目标。
协同显著性中的聚类方法:
1.特征聚类:
对图像组中提取的高维特征进行聚类,找到图像之间的共享特征。
实现方法:
使用传统聚类方法(如 K-means)对特征向量聚类。
或者,基于图像特征之间的相似性构造图(graph),通过图分割方法(如谱聚类)对特征进行分组。
2.显著性区域的聚类:
图像组中可能包含多个候选显著性区域,通过聚类,找到这些显著性区域的共同分布。
具体应用:对显著性区域进行分组,其中包含最多图像的簇可能是目标的候选区域。
3.像素级聚类:
对图像组中的像素特征聚类,从而分割出属于协同显著性目标的像素区域。v
这种方法通常结合深度学习提取的像素级特征表示。
4.聚类在显著性优化中的作用:
聚类的结果可以作为约束条件,指导显著性图的优化。例如,可以通过聚类得到某些显著性区域的一致性分布,然后进一步优化显著性检测结果。
示例:聚类在 Co-SOD 中的具体应用
假设我们有一组包含共享目标的图像:
-
使用深度学习模型提取每张图像的特征(如卷积特征或 Transformer 编码器输出)。
-
对这些特征进行聚类,划分为若干组:
(1)一个组可能代表图像中的背景特征;(2)另一个组可能代表图像组中共享的显著性目标特征。 -
根据聚类结果,调整显著性图的分布。例如:
-
如果某个簇对应的特征被检测为背景,则降低该区域的显著性。
-
如果某个簇对应图像组中共享目标,则强化该簇的显著性区域。
-
常用的聚类方法及其适用性
-
K-means 聚类:
-
应用于显著性特征向量的分组。
-
快速且简单,但对聚类数量(K)的选择较敏感。
-
-
谱聚类(Spectral Clustering):
-
构建基于特征或显著性区域相似性的图(graph),然后对图进行分割。
-
适合用于图像组间复杂的关联建模。
-
-
基于密度的聚类(DBSCAN):
-
在噪声较大的数据中表现较好,可以用于发现协同显著性区域中的离群值或背景点。
-
-
层次聚类:
-
不需要事先指定簇的数量,可以通过层次结构逐步发现协同显著性目标。
-
-
深度嵌入聚类(Deep Embedded Clustering, DEC):
-
结合深度学习提取的特征进行聚类,适合高维复杂特征的分组。
-
总结
在协同显著性物体检测中,聚类是帮助模型挖掘跨图像共享特征的重要工具。通过聚类,可以将复杂的显著性特征分组,从而强化协同目标的定位。它不仅可以用于候选显著性区域的筛选,还可以优化显著性图的生成,是协同显著性检测中不可或缺的一部分。
问题三:什么叫做主成分分析(pca)?
在协同显著性物体检测(Co-Saliency Object Detection)中,主成分分析(Principal Component Analysis, PCA)是一种常用于数据降维的技术,目的是通过将数据映射到一个新的坐标系,使得新的坐标系中的每个维度(称为主成分)都尽可能地保留数据的方差信息。简而言之,PCA的目标是减少数据中的冗余信息,从而使得数据变得更加简洁和易于处理。
问题四:协同显著性目标检测中什么叫做全局池化?
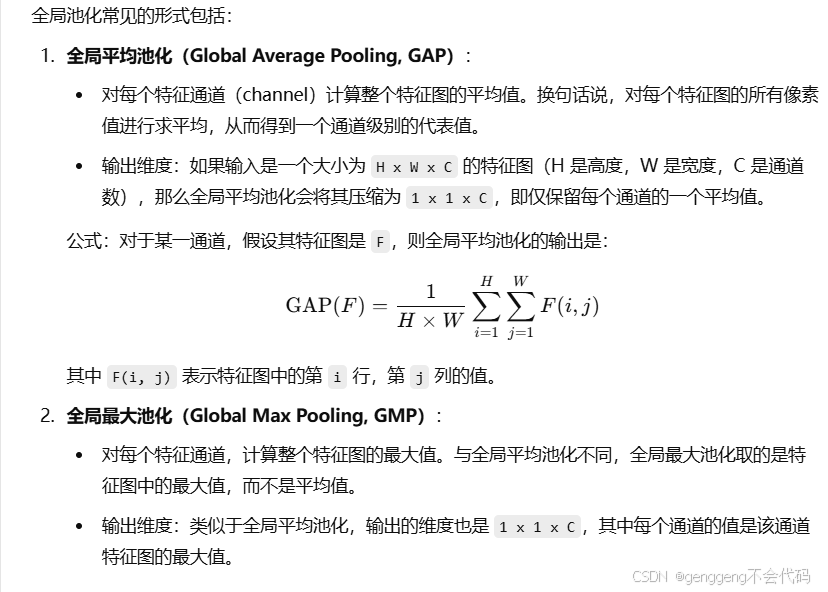
在协同显著性目标检测(Co-saliency Object Detection)中,全局池化(Global Pooling) 是一种池化操作,它将整个特征图的信息聚合成一个固定大小的输出。与局部池化(如最大池化或平均池化)不同,全局池化通过对整个特征图的所有空间位置进行池化,得到一个单一的值,从而将空间维度减少到 1。
全局池化常见的形式包括:
问题四:为什么在协同显著性目标检测中使用全局池化?
-
减少维度:全局池化可以将高维的特征图压缩成一个固定大小的输出,通常是一个包含每个通道的单一值。这对于下游任务(如分类、回归或目标检测)非常有用,尤其是在模型需要处理固定大小的输入时。
-
全局信息聚合:在显著性目标检测中,全局池化帮助模型从整个图像或区域中提取全局信息,而不仅仅依赖于局部信息。这对于检测场景中的显著性目标(如最突出的物体)非常重要,尤其是在存在多个对象的情况下。
-
提高鲁棒性:全局池化可以提高模型的鲁棒性,因为它减少了对特定空间位置的依赖,尤其是在物体的位置和形态不一致的情况下。通过这种方式,模型能够更好地理解图像的全局结构。
-
简化模型结构:通过将特征图压缩成一个小的向量,模型的复杂度和计算量大大减少,使得模型更高效且易于训练。
在协同显著性目标检测中的应用
协同显著性目标检测(Co-saliency Object Detection)任务通常涉及多个相互相关的显著性目标,在这种情况下,全局池化可以用于以下方面:
-
特征融合:当模型需要聚合来自不同图像或区域的特征时,全局池化可以有效地提取出最重要的特征信息。这对于检测图像中的显著性物体尤为重要,特别是在多目标检测或背景干扰较多的场景中。
-
决策层次的全局信息提取:通过全局池化,模型能够获取图像的全局特征信息,帮助其在高层次上做出更准确的决策,从而提高检测精度。
总结
(1) 全局池化(如全局平均池化和全局最大池化)通过将整个特征图压缩为单个值,帮助模型从全局角度理解图像。
(2)在协同显著性目标检测中,全局池化可以提取重要的全局特征信息,帮助模型在多目标、复杂背景中检测到显著性物体。
(3)这种技术能够减少计算量,简化模型结构,并提高检测精度和鲁棒性。
问题五:显著性物体检测中协同表示是什么意思?
在显著性物体检测中,协同表示的核心思想是通过分析多张相关图像之间的关系和特性,共同提取显著性目标的共享特征和模式。协同表示特别适用于协同显著性目标检测,这种任务需要从一组相关图像中定位显著的目标。
问题六:协同显著物体检测中什么叫做纯净协同表示搜索?
在So-SOD中,纯净协同表示搜索(Pure Collaborative Representation Search PCS)是一种旨在提取纯净的协同特征的方法。这种方法通过去除非相关或冗余信息,专注于显著目标之间的共享信息,从而提高检测的准确性和鲁棒性。
方法实现:
(1)GNN:利用图结构建模图像之间的关系,提取显著物体间的共享特征。
(2)自监督学习:通过无监督/自监督的方法,在没有显示标签的情况下发现共享显著性。
(3)注意力机制:利用全局注意力模型或跨图像注意力机制强化显著物体区域。
纯净协同表示搜索的目的:
(1) 去除干扰:从冗余或无关的背景中提取显著目标。
(2)增强共享性:集中于跨图像组的通用特征,保证结果的通用性和鲁棒性。
(3) 提高效率:通过高效的搜索机制
问题七:什么叫做循环代理纯化(RPP)?
循环代理纯化是一种迭代优化方法,通常用于逐步提升模型对协同显著区域或其他特定目标的表示质量。RPP的核心思想是利用循环机制,通过多轮代理更新和纯化操作,逐步去除噪声干扰,提取更加纯净且精准的目标特征。
1. 代理(Proxy)的定义:代理是目标区域(如协同显著区域或显著物体)的中间表示。
-
代理通常通过某种方法(如显著区域嵌入的聚类中心、特征加权平均或显著性分布)生成,用于大致描述目标区域的特性。
-
由于初始代理可能不准确,存在噪声或偏差,因此需要进一步优化。
2. 多轮代理的核心思想
多轮代理引入了迭代优化机制,通过多轮(Multi-round)更新,逐步改进代理的质量:
-
初始代理生成:从输入数据(如显著性嵌入或显著性得分)中提取初始代理表示。
-
第一轮优化:根据代理与真实目标区域的相关性进行筛选和调整,剔除低质量的特征。
-
后续多轮优化:逐步重复上述优化过程,每轮利用上一轮的代理结果,进一步去除噪声、强化相关特征。
-
收敛:在多轮更新后,代理表示会趋于稳定,成为更加纯净、准确的目标区域表示。
3. 多轮代理的目标
-
去噪:通过多轮更新,减少初始代理中不相关或干扰信息的影响。
-
强化相关性:逐轮提取更接近真实目标区域的特征,使代理更加可信。
-
提高鲁棒性:即使初始代理存在偏差,多轮优化能够逐渐校正这些偏差,得到更加精准的结果。
4. 如何实现多轮代理
-
基于距离的迭代更新:每一轮根据目标特征与代理的距离筛选更高置信度的特征点,重新生成代理。
-
注意力机制:每轮通过注意力机制进一步增强目标区域的特征表示,减少背景影响。
-
循环网络结构:例如通过 RNN(循环神经网络)或其他循环优化算法,逐步更新代理表示。
5. 多轮代理的优势
-
逐步改进效果:相比一次性生成代理,多轮优化可以更稳健地逼近真实目标表示。
-
减少背景干扰:通过每轮筛选噪声和无关特征,代理能够更加集中于目标区域。
-
适应复杂场景:在协同显著性检测等场景中,图像组间的目标可能具有差异性,多轮代理能够通过迭代找到共享的高置信区域。
6. 应用场景
-
协同显著性检测(Co-SOD):多轮代理可用于提纯协同显著区域嵌入,逐步去除背景和无关噪声。
-
显著性目标检测和分割:提高对复杂背景中显著目标的检测能力。
-
无监督学习:在没有明确标签的情况下,通过多轮代理优化实现高质量特征提取。
2 相关操作
问题一:什么叫做底层一致性?
底层一致性是指图像中的一些底层特征(如颜色,纹理,边缘等)在空间上往往有一定的规律性或一致性,这种一致性可以帮助我们更好的识别目标,具体来说,底层一致性理论认为,显著目标往往具有一定的结构规律或局部一致性,这种一致性可以被提取并用于提升显著性检测的精度。
问题二:什么叫做利用深度一致性的Co-SOD?
深度一致性指的是利用深度神经网络(如卷积神经网络,CNN)从图像中提取的特征,在多个相关图像之间保持一致性,以帮助识别出共同显著物体。深度网络在学习图像的低级和高级特征时,能够更好的捕捉到图像间的结构,语义等潜在一致性特征。
问题三:什么叫做利用显著性区域细化的 Co-SOD?
指的是在Co-SOD任务中,通过对图像的显著性区域进行细化和优化,以提高协同显著物体检测的准备性。
3 提出的方法
3.1 概述
问题一:什么叫做显著性物体检测头?
在主干网络之后,会接入一个或多个头来执行特定任务。在这个例子里,SOD头是用来生成显著性图的。显著性图是一种表示图像中的重要区域的图像,每个像素的值表示该位置的显著性。
问题二:什么叫做协同表示代理?
协同表示是指通过不同特征的组合或协同工作来表达某个目标或物体。在图像处理中,协同表示代理可能是利用多个特征或信号的组合来对图像内容进行建模或代理处理。
问题三: CoRP的框架
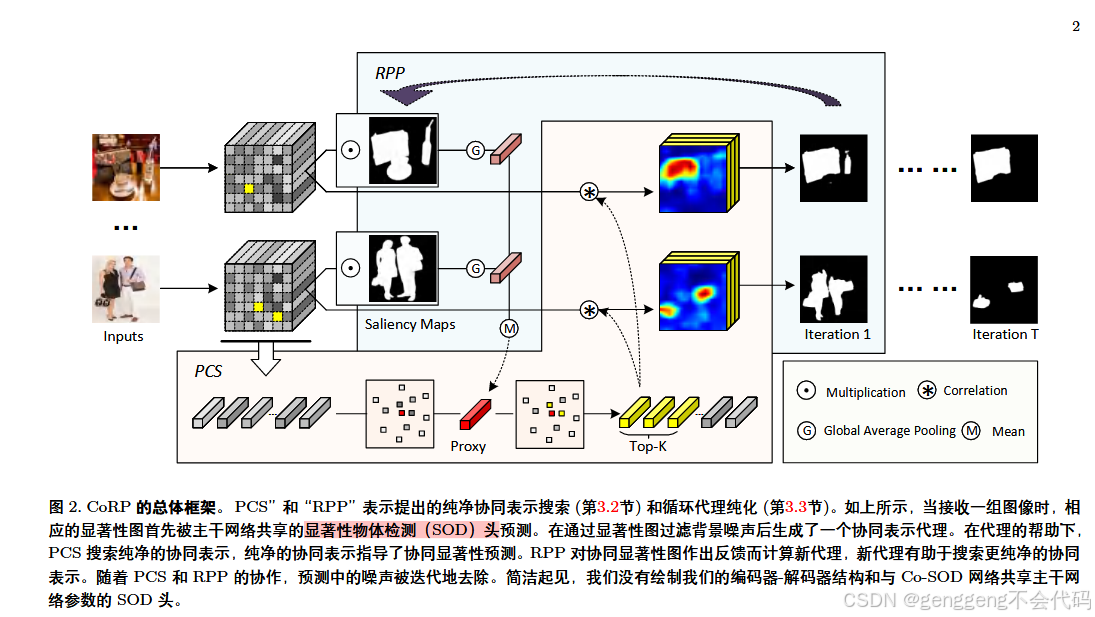
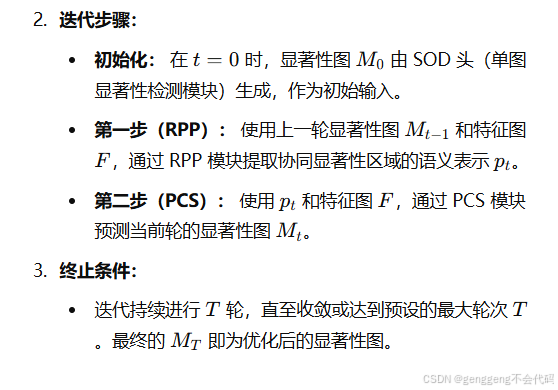
步骤:
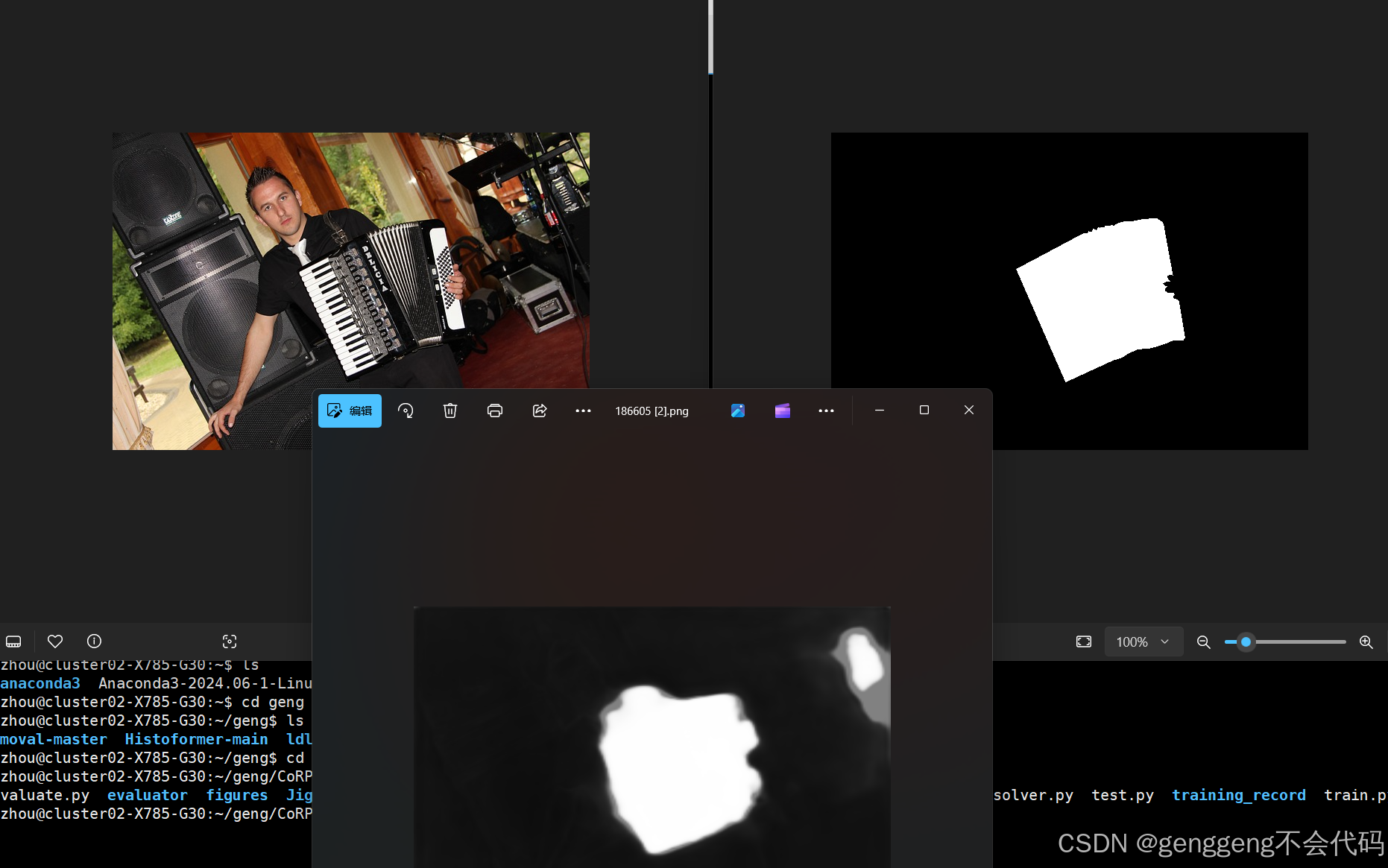
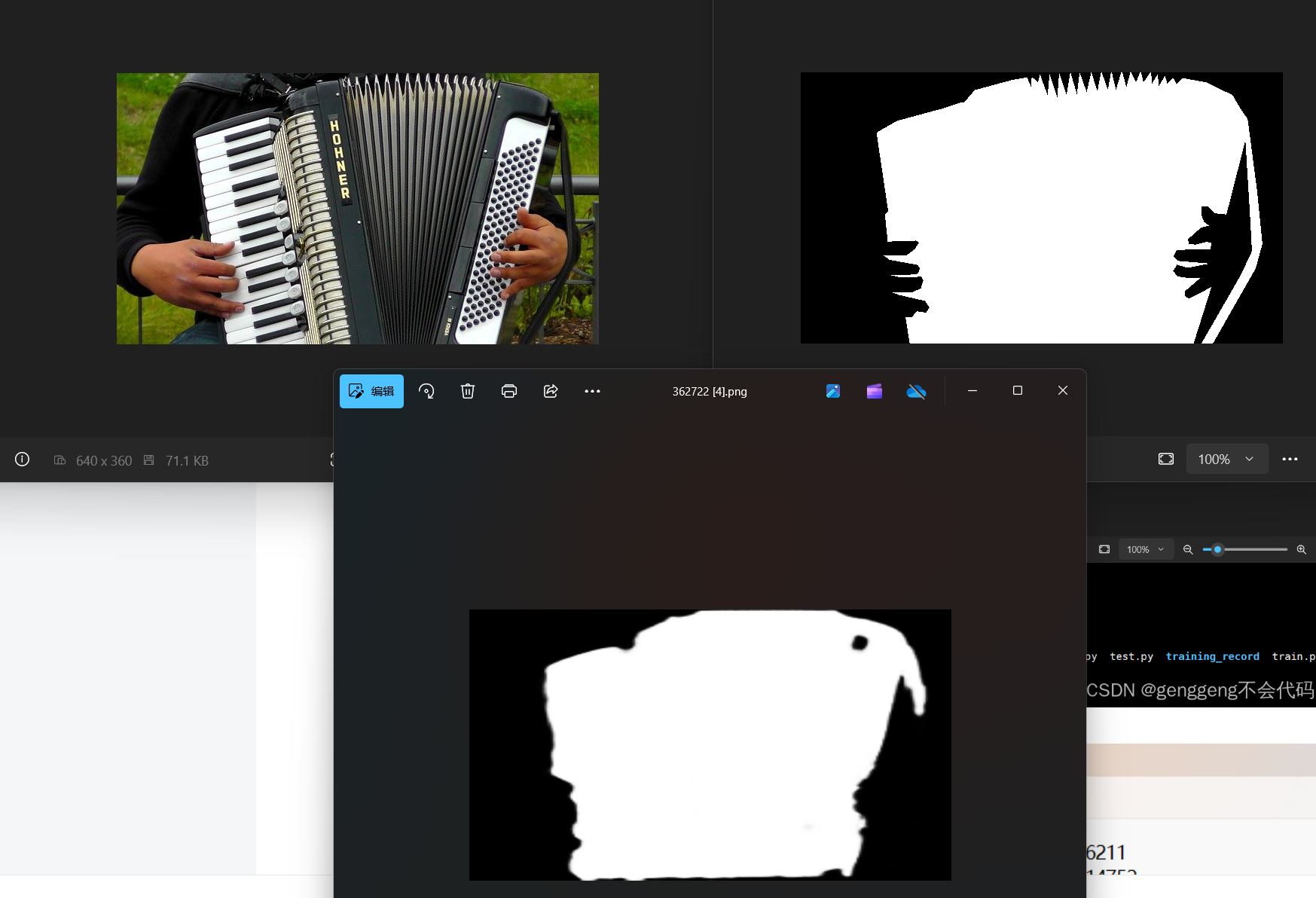
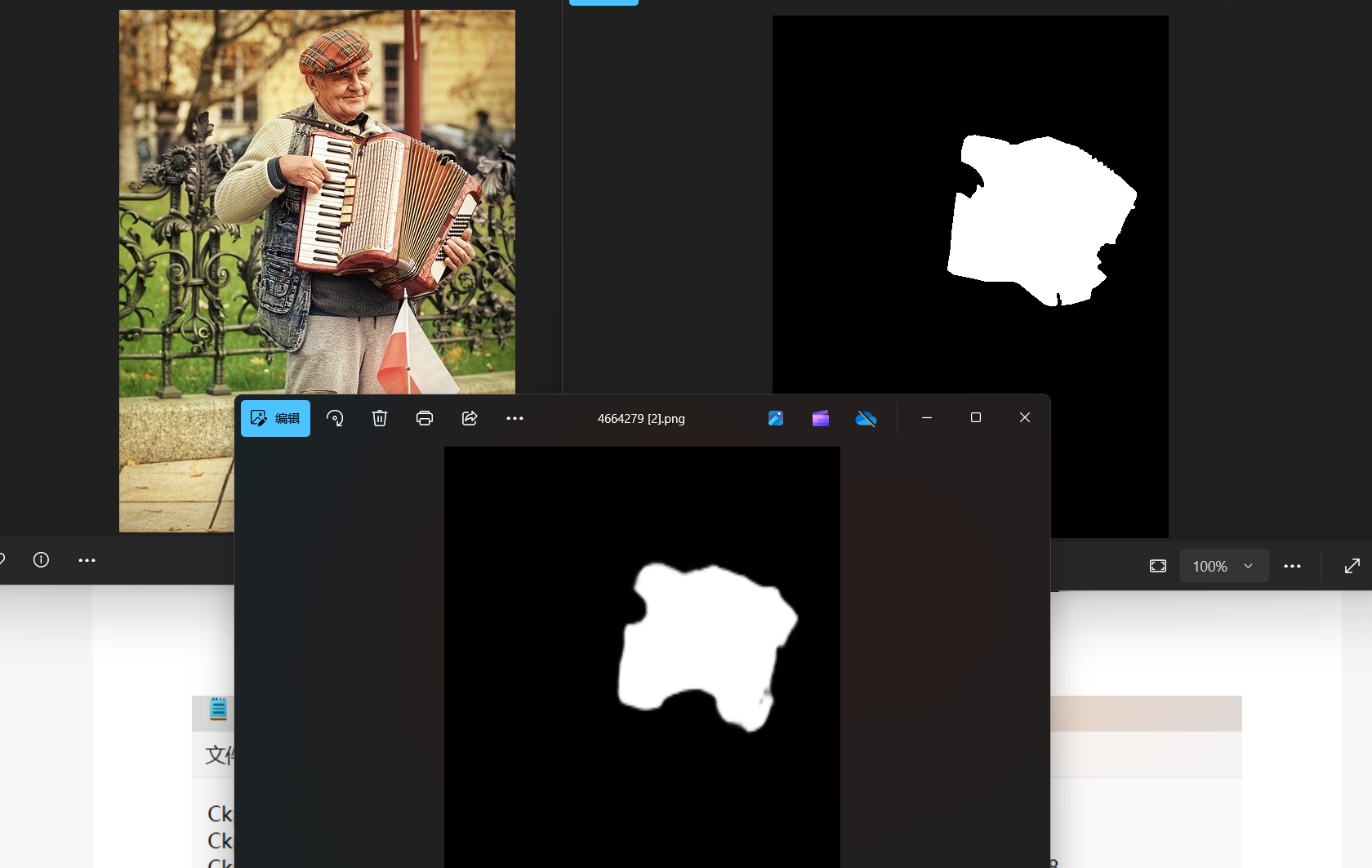
第一步:输入: 左侧输出一组图片,这些输入的图像被送到主干网络中进行特征提取。
第二步: 构建俩俩关系-PCS: 操作:(1)将输入图像俩俩配对,计算它们之间的相关性。(2)使用这些相关性构建一个表示共享显著图的特征图。输出:每张图像的显著性特征图,初步体现了图片间的共同显著性目标。
作用:这一步的核心是找到图片之间哪些区域是共享的,显著的。利用图像对的特征比较,增强显著性目标的表征。
第三步:生成代理特征:操作:(1) 将PCS模块生成的显著性特征图压缩为代理特征。(2) 每个代理特征是对输入图像显著性目标的简介表示,减少了数据量。输入:代理特征(Proxy)
作用:代理特征提取了显著性目标的核心信息,便于后续处理。
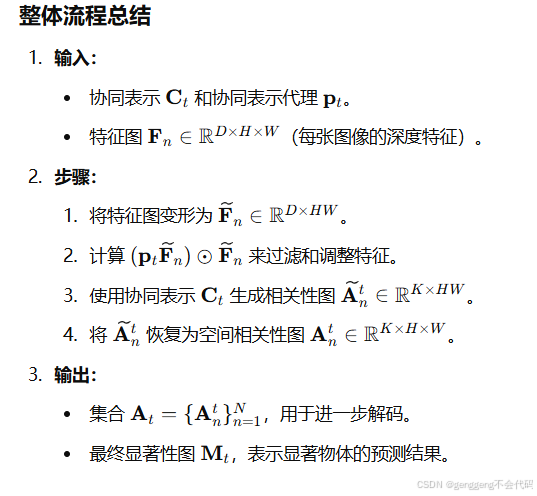
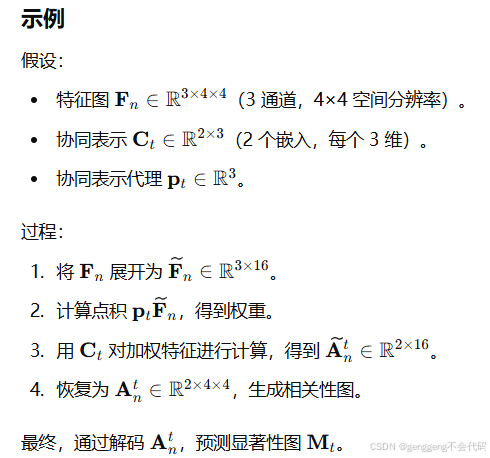
第四步: 递归优化-RPP:操作:(1)初始显著性特征图与代理特征结合。(2)每次迭代,通过计算显著区域的候选(Top-K),生成一个更精确的显著性分割图。(3)将更新后的显著性分割图递归地送入下一次迭代。迭代更新的步骤:初始显著性特征图-->用代理特征优化-->得到更精确的显著性图。持续迭代,逐步逼近真实的显著性区域。输出:每次迭代都会生成一个更新的显著性分割结果,直到达到最终结果。
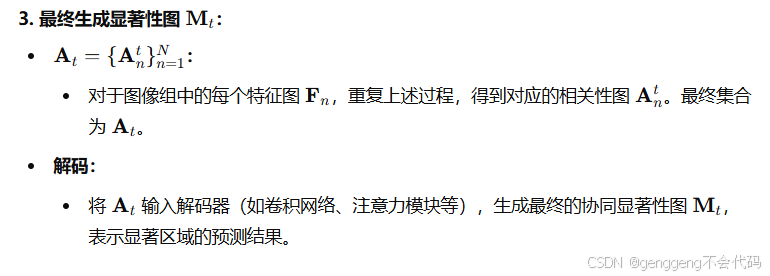
第五步:生成最终显著性分割结果:多次迭代:(1)从第一轮结果开始,通过递归更新,逐步优化显著性目标的分割。(2)直到第T轮,输出最终的显著性分割结果。
最终结果:每次图像的显著性目标区域的精准分割。
框架的关键操作符
Corrleation(相关性):用于衡量图像对之间的显著性区域匹配程度。
Multiplication(乘法):用于特征的加权融合。
Mean(平均):全局平均池化或特征归一化,用于简化表示。
总结:工作原理的整理逻辑
- 输入阶段: 提供多张可能含有共享显著性目标的图像。
- 特征提取阶段: PCS 模块通过两两关系提取图像间的共同显著性特征。
- 代理优化阶段: 通过生成代理特征(Proxy)来简化显著性目标的特征表示。
- 递归更新阶段: 使用 RPP 模块对显著性目标进行迭代优化,每轮输出更精确的显著性分割结果。
- 最终输出: 完成多轮优化后,得到最终的显著性分割结果。、
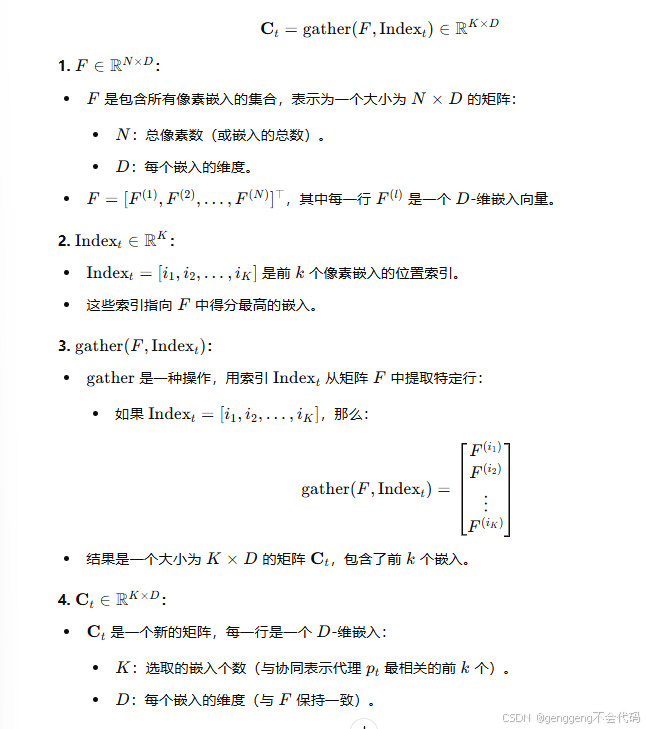
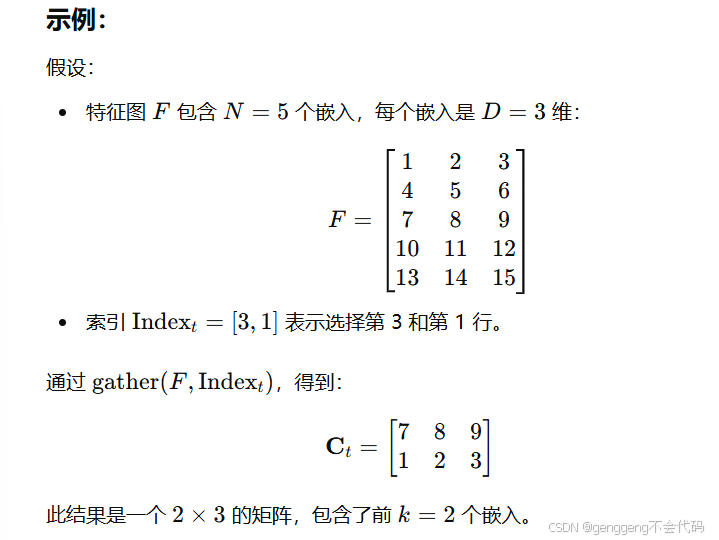
3.2 纯净协同表示搜索(PCS)
问题一:![]()
F(l)∈RD:像素嵌入,是一个 DDD-维向量,表示特定像素点的深度特征。
F(l)⊤:F(l)F^{(l)}F(l) 的转置,表示将列向量转置为行向量,以便进行向量的内积计算。
点积的结果是一个标量,表示两个向量之间的相似性。
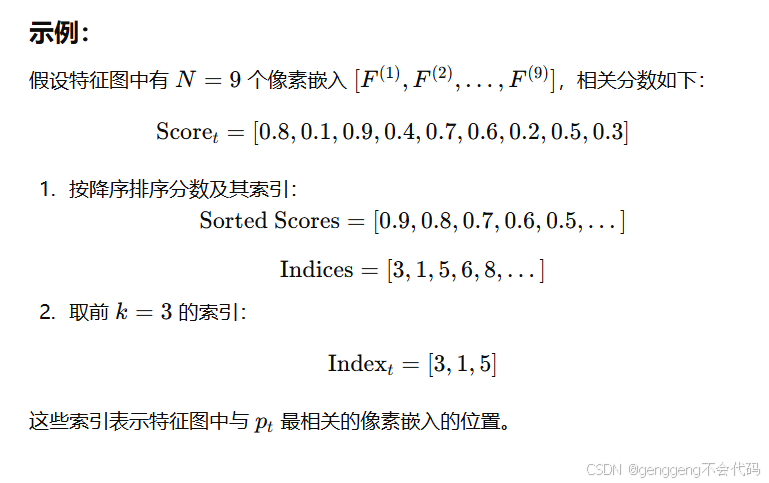
问题二:
这是一个操作,表示从所有像素嵌入的分数 Score}_t(l) 中,选择得分最高的前 k 个对应的索引 l。arg: 表示返回的是得分最高的那些像素的索引,而不是具体的分数值。topkl: 表示只取前 l 个值。
问题三:![]()
问题四:
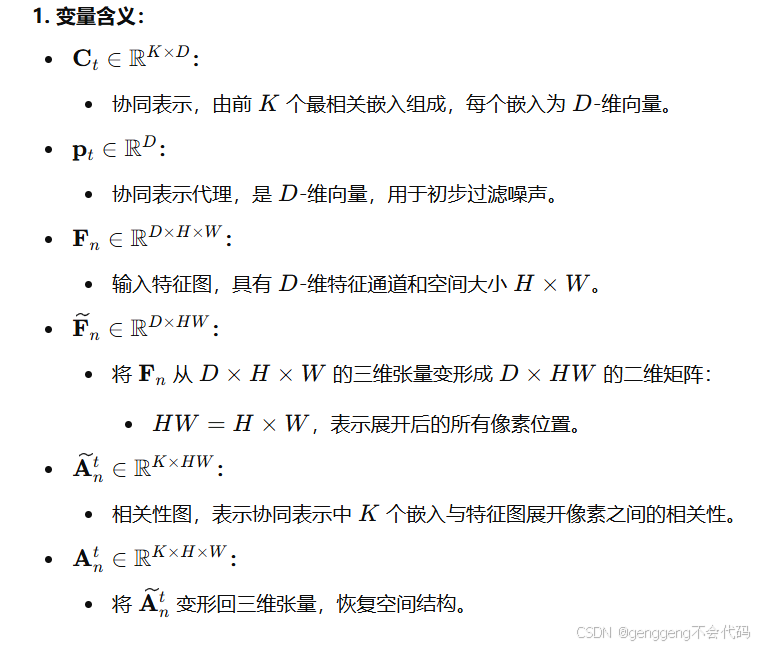
3.3 循环代理纯化(RPP)
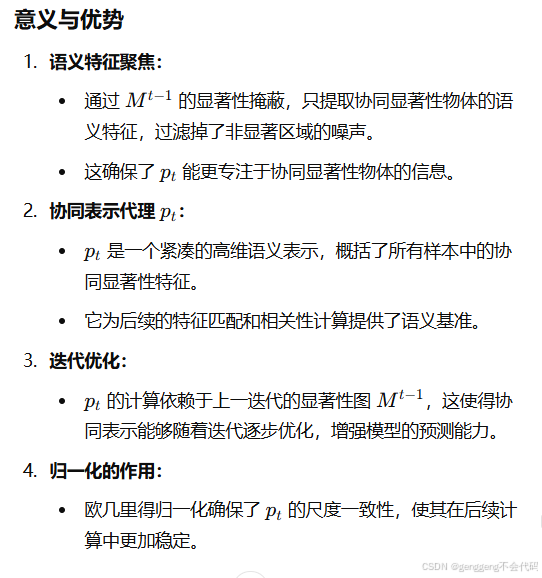
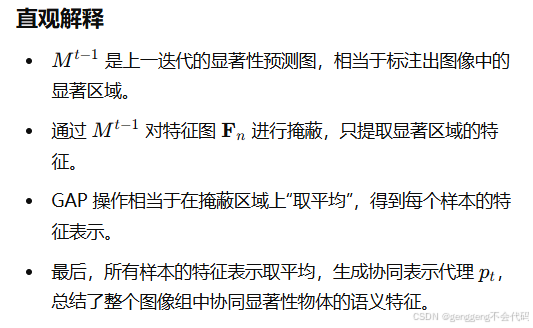
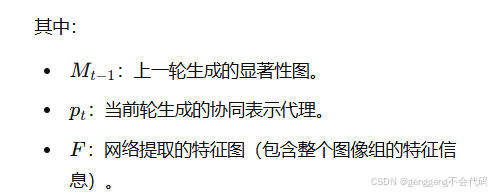
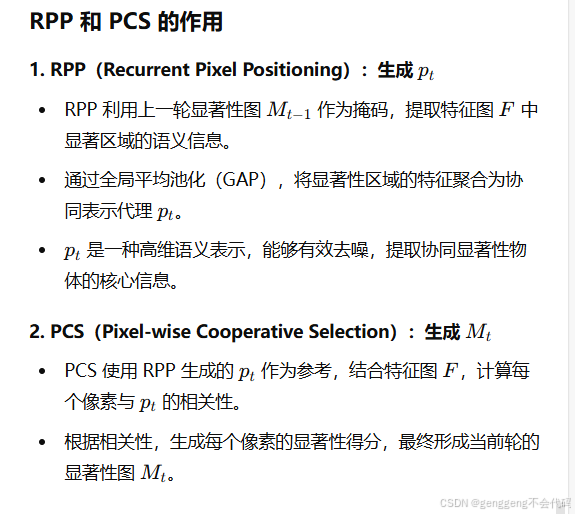
问题一:如何利用如何利用M^{t-1}计算p_t?
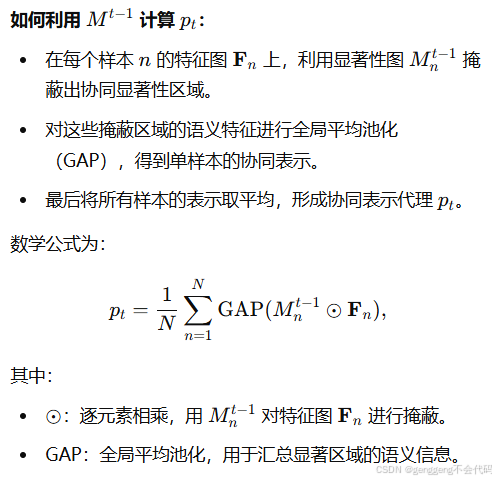
问题二:什么叫做全局平均池化(GAP)?
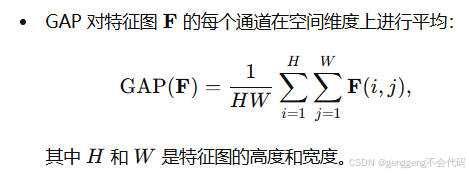
进行归一化:计算 p_t后,使用欧几里得距离标准化,将其映射到单位球面上:
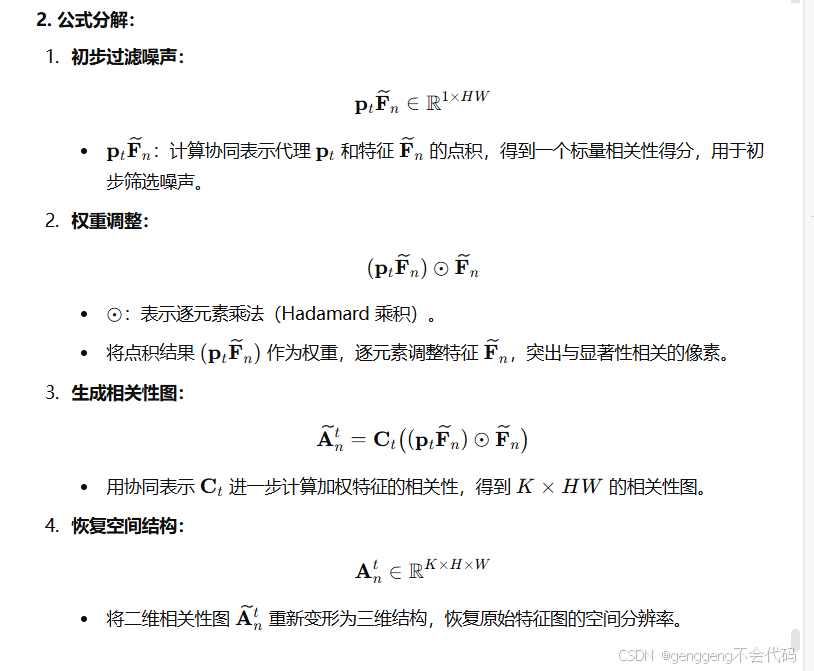
问题三: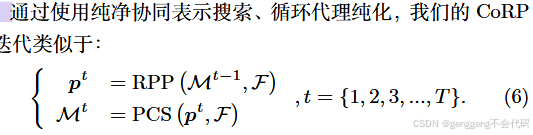
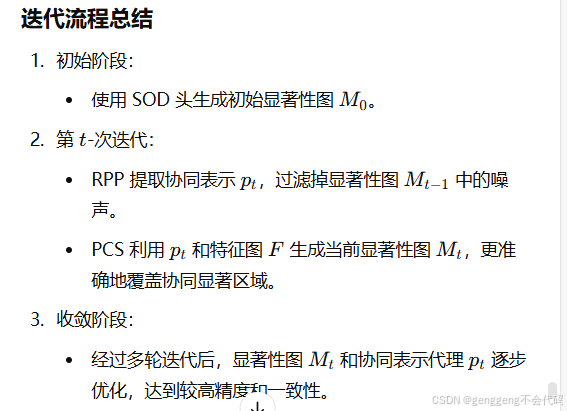
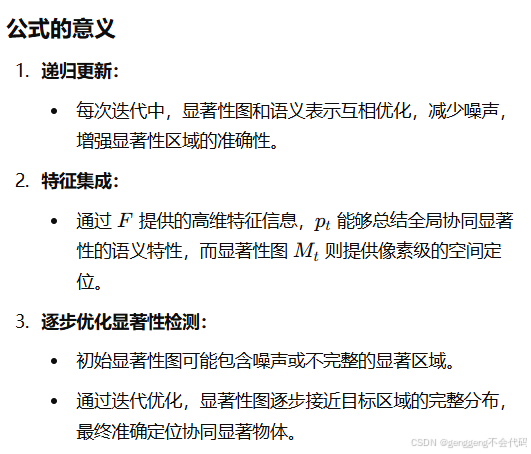
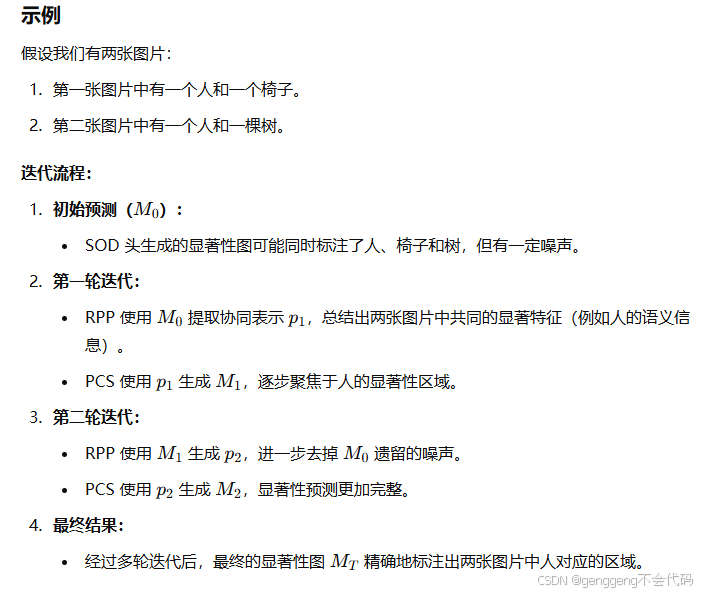
这段公式描述了CORP的迭代核心过程,定义了模型如何在协同显著性检测任务中逐步优化显著性预测M_t和协同表示代理P_t。
4 实验
4.1 实现细节
问题一:什么叫做编码器-解码器结构?
编码器-解码器架构通常用于需要生成输出的任务,比如图像分割、图像生成、机器翻译等。在这种结构中:
编码器:将输入数据(如图像)映射到一个较低纬度的空间,通常通过卷积层来提取特征。
解码器:将编码器输出的特征映射到原始空间或期望的输出形式。在图像任务中,解码器的目标可能是将特征图转化为与原始输入相同尺寸的图像(例如图像分割中生成每个像素的标签)。
在这个上下文中,VGG-16 被用作 编码器 部分,它从输入图像中提取特征,之后可能通过解码器部分恢复到某种输出格式(比如图像分割、重建或其他任务)。
问题二:什么叫做ICNet的解码器?
ICNet是一种图像分割网络,其解码器设计通过融合来自不同层次的特征来进行有效的预测。在ICNet中,解码器通过逐步融合浅层和深层特征图来提高分割效果,尤其是在处理细节时。
CoRP 模型的解码器采用了与 ICNet 相似的结构,这意味着它也利用多层次的特征进行融合和处理,最终生成预测结果(这里是协同显著性图 M1)。
问题三:什么叫做IoU损失?
IoU(Intersection over Union)损失是一种常用于目标检测任务中的损失函数,它衡量预测框(predicted bounding box)与真实框(ground truth bounding box)之间的重叠程度。具体来说,它是通过计算预测框和真实框交集面积与并集面积的比值来定义的。
IoU损失就是通过反向优化这个IoU值来让模型学会生成更准确的边界框。通常,IoU损失是IoU与1的差值(即1 - IoU),这就意味着IoU越大,损失越小,反之,损失越大。优化目标是使IoU尽可能大。
4.2 评估数据集合评价指标
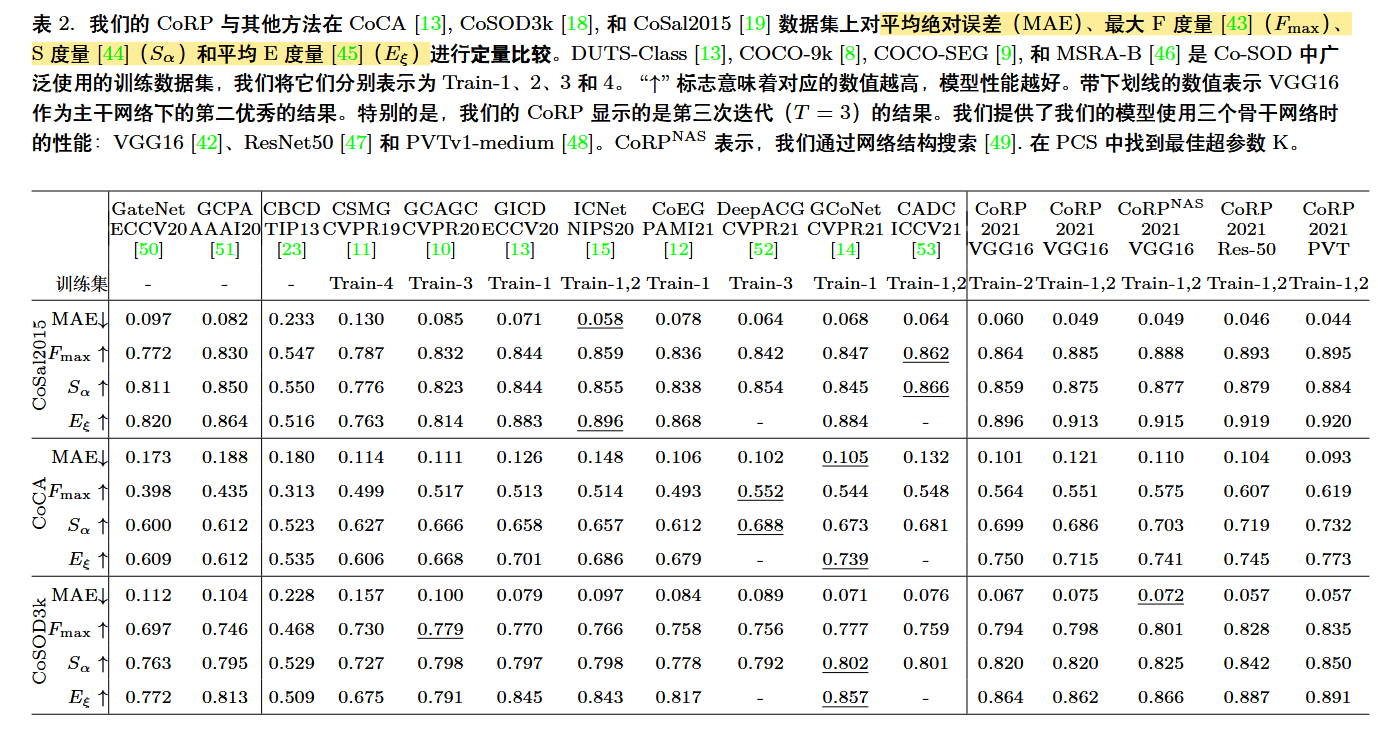
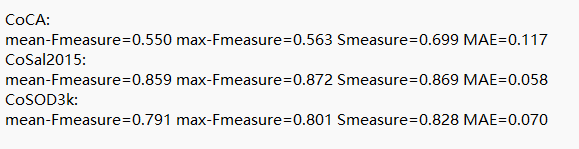
问题一:什么叫做平均绝对误差,最大F度量,S度量以及平均E度量?
平均绝对误差:平均绝对误差是回归问题中常用的评估指标,用于衡量模型预测值与真实值之间的差异。计算公式为:
其中,y_i 是真实值,y^i 是预测值,n是样本数量。MAE 衡量的是预测值与真实值之间的平均绝对差距,误差越小,模型表现越好。
最大F度量:F度量(F-score)是评估分类模型性能的一个常用指标,尤其是二分类问题中的准确性与召回率的综合衡量。最大F度量指的是在所有可能的阈值下,找到最大化F-score的阈值,并基于这个阈值评估模型。公式如下:
- Precision(精度)是指所有被预测为正类的样本中,真正正类的比例。
- Recall(召回率)是指所有真实正类样本中,被正确预测为正类的比例
最大F度量意味着我们选取一个最优的阈值,使得F1分数(精度与召回率的调和平均数)达到最大,从而全面评估分类模型的表现。
S度量:S度量常用于目标检测或图像分割任务中,衡量模型预测的分割区域与真实区域之间的相似性。其计算方式是通过同时考虑区域的相似性和结构信息,来评估模型分割的精确度。简单来说,S度量包含了对精度和结构一致性的双重考量。
平均E度量:E度量通常是用于图像分割任务的评估指标,主要用于评估预测结果与真实结果之间的边缘匹配度。E度量通过计算预测边缘与真实边缘之间的重叠度量,来量化图像分割的质量。平均E度量则是对多个图像分割任务的E度量结果进行平均,以提供一个总体的评价。
4.3 与现有方法进行比较
4.4 消融实验
问题一:什么叫做消融实验?
消融实验(Ablation Study)是机器学习和深度学习中常用的一种实验方法,主要用于评估和分析模型中不同部分或组件对最终性能的贡献。
常见的消融实验做法包括:
- 去掉某个特征:评估如果模型中某个输入特征被移除后,模型性能如何变化。
- 移除某个模块:例如,去掉模型中的某一层神经网络,或者去掉某种正则化方法,观察其对结果的影响。
- 禁用某个机制:例如,禁用注意力机制、卷积层等,来测试它们对最终结果的贡献。
消融实验是一种帮助理解模型各部分作用、提升模型设计的重要工具。

















 1753
1753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









