







一、准备工作:
有关CUBEMX的初始化配置,参见我的另一篇blog:【STM32+HAL】CUBEMX初始化配置
二、所用工具:
1、芯片: STM32F407ZGT6
2、STM32CubeMx软件
3、IDE: MDK-Keil软件
4、STM32F4xxHAL库
三、实现功能:
1、控制LED一秒闪烁一次
2、实现串口通信:电脑控制pwm频率,串口输出pwm频率
3、按键控制呼吸灯暂停与继续
4、非线性呼吸灯实现
四、HAL库配置 (初始配置完成):
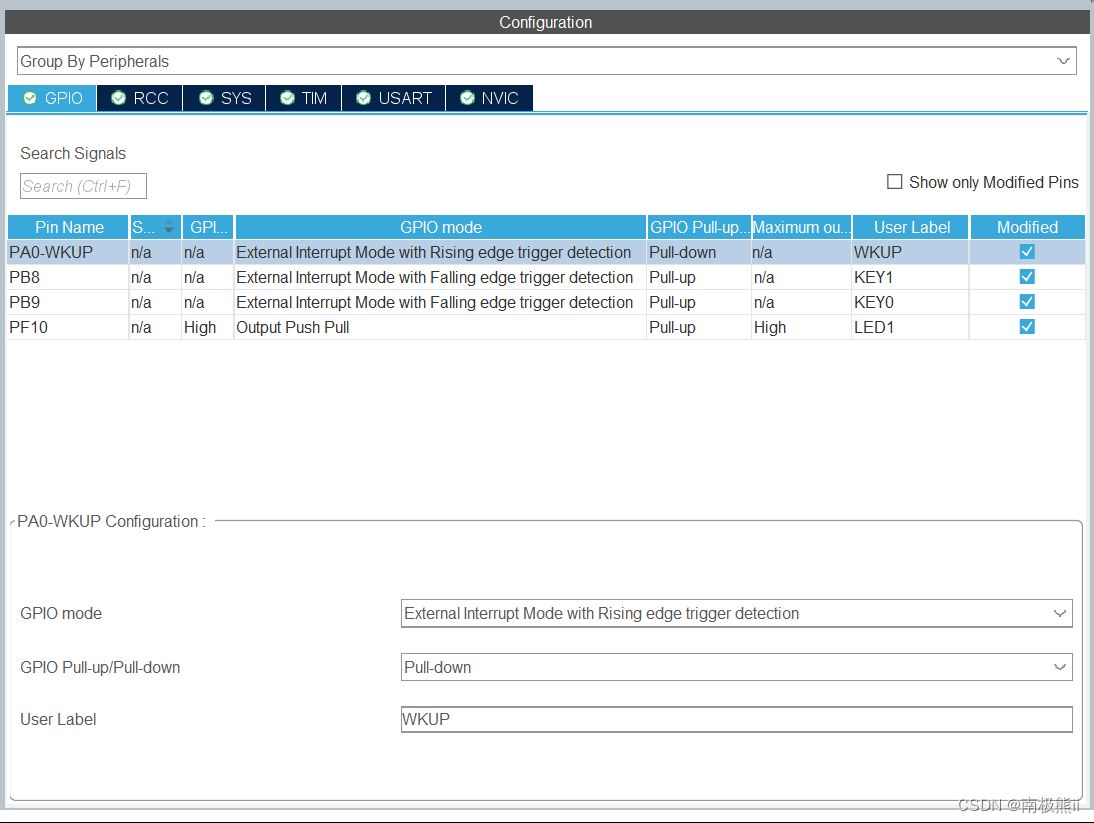
1、配置引脚
根据数据手册配置相应引脚的参数,此芯片PF10为LED灯,PB8,PB9,PA0为按键
2、设置优先级
为避免在按键中断中延时函数卡死,需改变Time base优先级

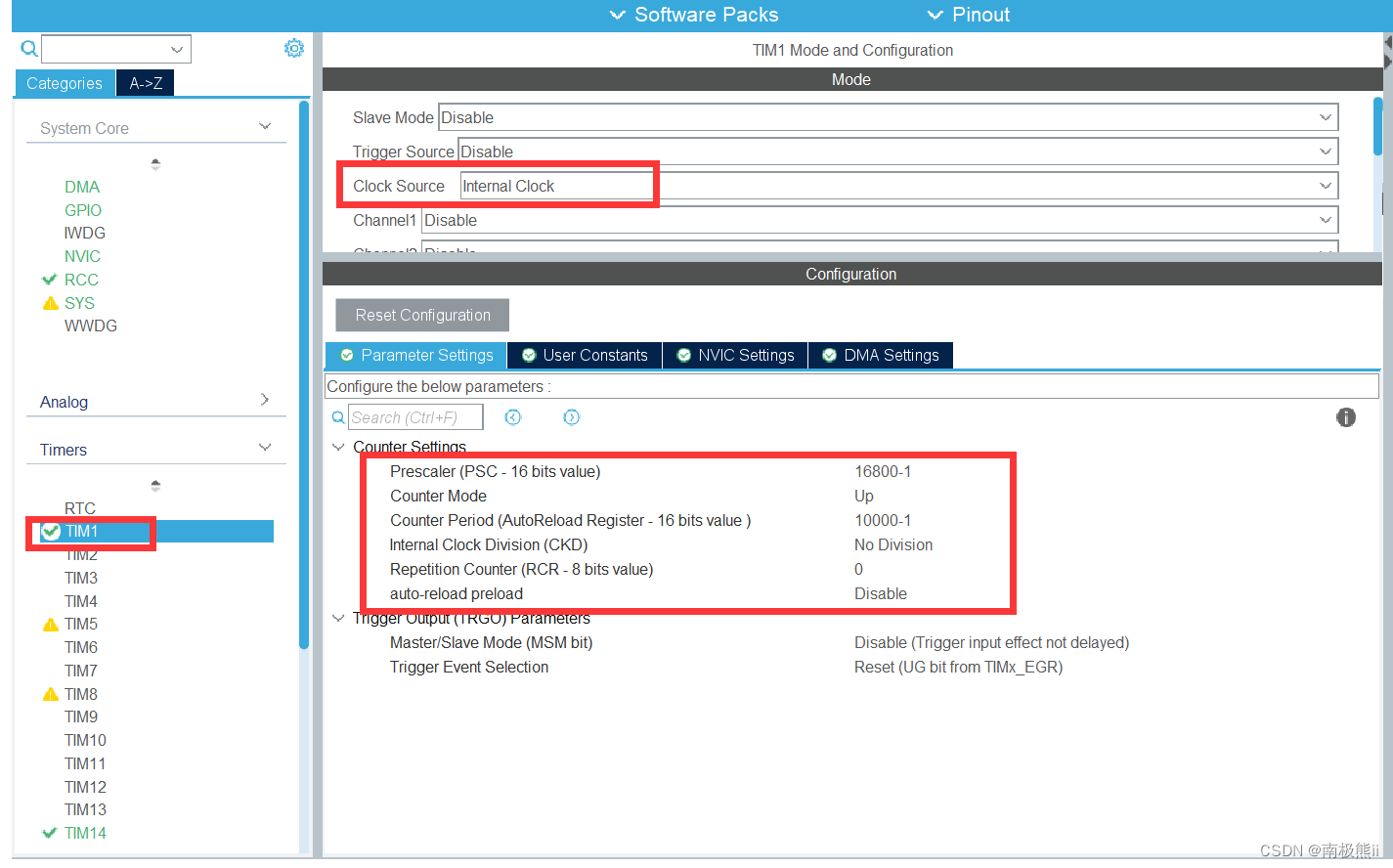
3、开启定时器1
设置定时器频率为1HZ
定时器频率=168MHZ / (PSC+1) / (ARR+1)
4、开启PWM引脚
占空比先不填,到代码中实现

5、生成代码 
至此,CUBEMX配置完成
五、KEIL填写代码:
1、串口重定向
#include "stdio.h"
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}2、初始化
HAL_TIM_Base_Start_IT(&htim1);//定时器1中断初始化
HAL_TIM_PWM_Start (&htim14, TIM_CHANNEL_1);//Pwm初始化
printf("Hello World\r\n");//串口输出测试
HAL_UART_Receive_IT(&huart1, &aRxBuffer, 1); //串口接收初始化3、pwm函数,在while(1)中运行
void pwm(void)
{
if(fxx==0){ //若为线性呼吸灯
if(k&&flag){
if(bri>=TIM14->ARR){
dir=-1;
}
else if(bri<=0){
dir=1;
}
bri+=dir;
}
}
else if(fxx==1){ //若为非线性呼吸灯
if(bri>=TIM14->ARR){
dir=-1;
i=0;
flag_fxx=1;
}
else if(bri<=0){
dir=1;
flag_fxx=0;
}
i=(dir+i>=100||flag_fxx)?0:i+1;
bri+=dir+i;
}
TIM14->CCR1=bri;
HAL_Delay(10);
}
4、接收数据函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
UNUSED(huart);
if(huart==&huart2){
if(Uart1_Rx_Cnt >= 255) {
Uart1_Rx_Cnt = 0;
memset(RxBuffer,0x00,sizeof(RxBuffer));
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出", 10,0xFFFF);
}
else{
RxBuffer[Uart1_Rx_Cnt++] = aRxBuffer;
if((RxBuffer[Uart1_Rx_Cnt-1] == 0x0A)&&(RxBuffer[Uart1_Rx_Cnt-2] == 0x0D)) {
strcpy(rx_buf,RxBuffer);
pl=0;
pl=atoi(rx_buf);
htim14.Instance->PSC = (uint16_t )((double)84000000/(double)(htim14.Instance->ARR+1)/pl)+1;
while(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);
Uart1_Rx_Cnt = 0;
memset(RxBuffer,0x00,sizeof(RxBuffer));
}
flag=0;
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
}
5、定时器中断
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if ( htim -> Instance == TIM1 ){
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_10);
duty=(double)(htim14.Instance->CCR1)/(double)(htim14.Instance->ARR+1);
HZ=84000000/(htim14.Instance->ARR +1)/(htim14.Instance->PSC);
printf ("HZ==%.0fhz DuTy==%.1f%%\r\n \r\n",HZ,duty*100);
}
}6、按键中断
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(HAL_GPIO_ReadPin(KEY_GPIO_Port,KEY_Pin) == GPIO_PIN_RESET){
HAL_Delay(20); //延时消抖
if(GPIO_Pin == KEY0_Pin){
k=1-k;
flag=1-flag;
printf("NO.%d\r\n",no++);
}
}
else if(HAL_GPIO_ReadPin(KEY_GPIO_Port,KEY_Pin) == GPIO_PIN_RESET){
HAL_Delay(20);
if(GPIO_Pin == KEY1_Pin){
fxx=1-fxx;
printf("NO.%d\r\n",no++);
}
}
}
7、主函数
while(1){
if(k&&flag==0){
HAL_Delay(5);
k=1;
flag=1;
}
pwm();
}完工
六、原理讲解:
参见
STM32CubeMX学习笔记(13)——PWM输出(呼吸灯)使用
【STM32】HAL库 STM32CubeMX教程七---PWM输出(呼吸灯)















 1112
1112











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









