






文章链接
原文:b9e98316cb72fee82cc1160da5810abc-Paper-Conference.pdf (neurips.cc)
代码:https://github.com/DeepGraphLearning/AStarNet
一、动机与贡献
为了使路径推理方法适用于大规模图上的归纳推理任务,文章改进了路径信息获取的方法。
路径推理方法较好的归纳推理能力。以往获取路径信息是搜索具体路径,耗时长。为降低耗时:1、使用迭代子图信息替代具体路径(具体比抽象多) 2、只考虑重要路径信息,去除不重要信息的干扰。更快获取路径信息的同时提高了预测效果。
两方面降低计算量:
1、将选取具体路径转化为了选取节点,迭代更新子图信息
2、基于A*(A start)考虑了节点重要性,只考虑重要路径,减少计算还能去除噪声
归纳推理:对不在训练集的实体进行预测,归纳能力就是对未训练实体的推理能力
基于嵌入和基于路径的归纳能力:由于预测原理不同,路径方法有更强归纳能力。transE是常见的基于嵌入方法,需要实体和关系嵌入来预测,实体的嵌入来自对训练集中实体,对未见过的实体没有嵌入,因而无法预测。基于路径的方法,只需要关系信息,比如 y是x的母亲: ,在x上找到对应关系链就可得出。因此归纳能力更强。
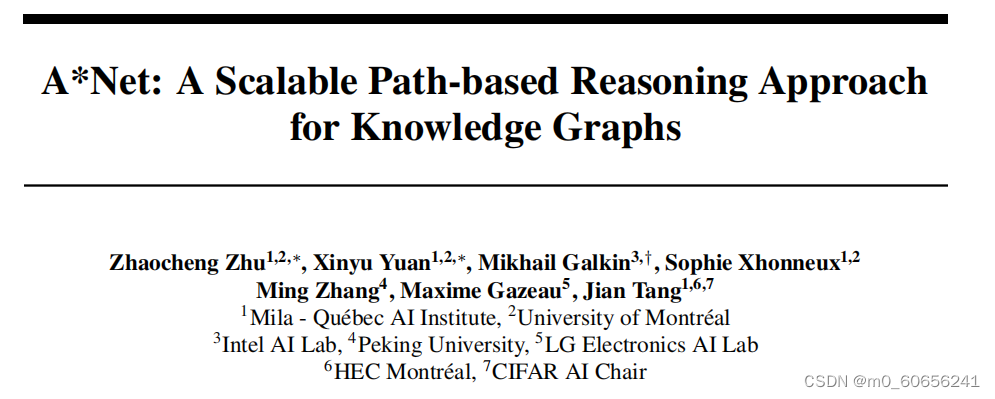
文章基于的路径方式:融合两节点间的所有路径信息(简称为子图信息),与查询关系比较,判断关系是否存在。
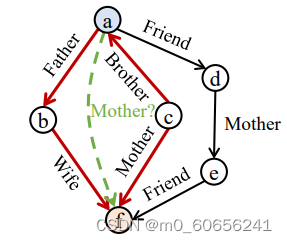
查询是(a,mother,?),三条路径中红色两条是重要路径,要比黑色路径更合理,因此a-f子图的嵌入只用重要路径嵌入相加,路径的嵌入则由关系的嵌入得出。将mother的嵌入和a-f子图嵌入比较判断f是否是查询答案
二、迭代与重要性
1、子图迭代
搜索具体路径可以被迭代子图信息替代,并且效率更高。子图信息保存在节点上,子图信息只是关系路径的另一种表现,不含特定实体信息。
为什么高效?
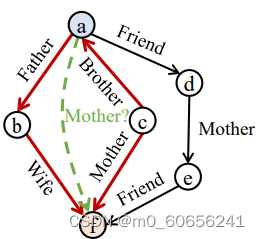
简略解释:多跳路径可以整合成单个子图信息,从3行到4行d,3行a储存3条具体路径 ,e储存1条 ,到达4行d要更新4条路径再汇总 。在三行a、e路径整合成子图,得到对应两个嵌入,第4行就只用更新两个嵌入再汇总。
详细解释:
路径搜索可以看做一个迭代过程。比如寻找源点到目标点的3跳路径,上一次迭代后,拥有从源点到任一节点的二跳路径,并且知道任意两点是否连接。找二跳路径终点与目标节点之间的连接,将其添加到二跳路径上,就得到了三跳路径,可用右图中的a到d的过程来模拟。也就是说对源节点O , 目标节点T ,中间节点M , 找O到T的路径可以通过所有O到M的路径加上M-T的连接获取。直接迭代具体路径需要记录O到M的每一条路径,需要更多的计算和内存,注意到O-M的所有路径就是一个子图,由不同的M对应的O-M得到M-T就是一种子图迭代。之前的路径汇总发生再的到所有具体路径之后,现在将这一步提前,在每个中间节点M上就汇总形成嵌入,下一跳的嵌入就可以直接由各个中间节点M所携带的嵌入汇聚,而不是取得具体路径来汇聚,在a-d的4跳路径种就是通过第三行的a、e两个节点代替了4条具体路径,减少了一半的计算。两种方式的相似性说明了中间M子图嵌入能间接传达路径信息。
具体路径嵌入更新 与 子图更新 的公式

(6)、(7)公式交代路径嵌入的更新。该嵌入只储存关系信息。 是由多个 路径嵌入 构成的集合,上角标是迭代次数,也可看做路径长度,
是u到v的对于查询q重要的路径。
(6)初始化,将源节点和其他节点区分开,给源节点赋一个全1张量
(7)x是可以到达目标v的中间点,到达v的新集合是由到达不同x的旧嵌入集合更新而成

是第t次迭代子图嵌入 ,大的
是将多个中间子图更新后的信息聚合 , 小
是将其与初始值聚合。
2、重要性
对给定查询,有的路径重要,有的路径会形成干扰,提前排除掉不重要的路径可以有效减少计算消耗,根据重要度分配权重可以提高准确性。通过A*Net来获取重要度。提前排除在整体流程中讲。
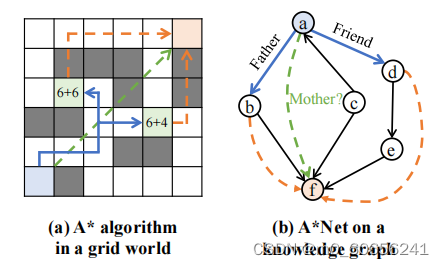
A*net 衡量语义上的路径长短,越短路径上的点越重要。其来源于A*算法 , A*算法是一种寻找最短路径的算法,当一个节点的 到源点距离+到目标距离 最小 , 该点就更可能是最短路径上的点。A*net ,用嵌入代表距离 , 前面提到节点上的嵌入是路径的另一种表示,也就代表该点到源点的距离 , 源点到终点的距离就是查询 , 根据这两个距离处理后就得到当前点到终点的距离。

是两距离和的嵌入 ,
是x上的子图嵌入,对应x到源点u的嵌入 ,
,是问题嵌入和制图嵌入通过神经网络处理 ,得到的嵌入对应 x 到终点的距离

接下来将 嵌入通过MLP转化为一个标量分数(如:0.7)
将重要度添加到之前的聚合公式:

三、整体流程
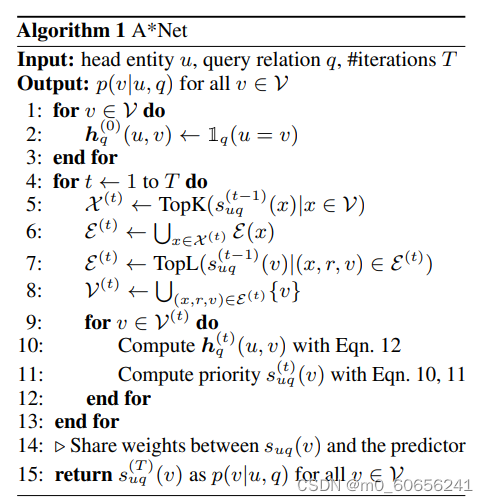
通过迭代获取子图信息,每次迭代知道上一次计算出的各个节点嵌入与重要度
初始化:除起始节点外其他节点嵌入都是全0向量
选择需要更新的节点:据上次重要度找到节点a , 其邻居有b、c、d ,用上次重要度筛选邻居,选择b、c需要更新。用公式来更新b、c的嵌入和重要度,进入下一次迭代
最后一次迭代后该点重要度就是其查询得分。
四、实验结果
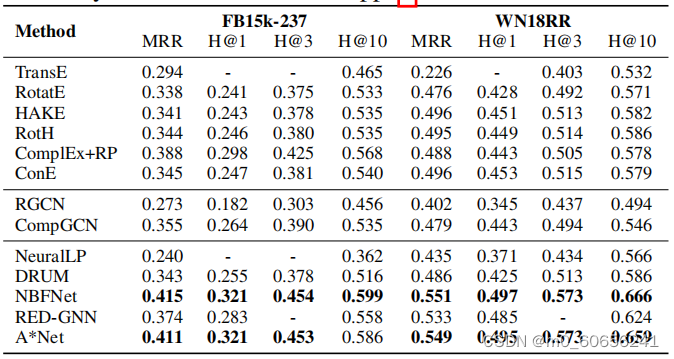
非归纳推理:
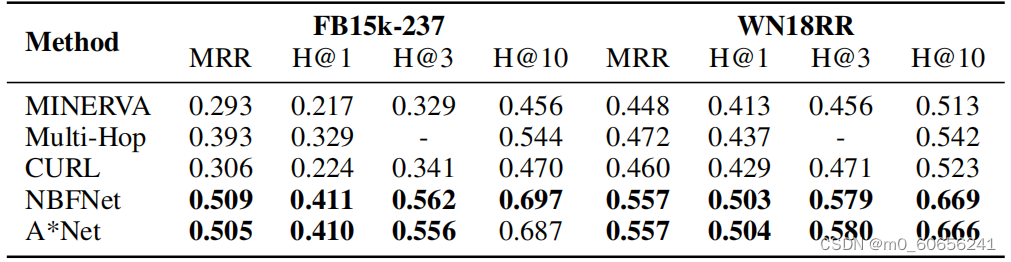
归纳推理:
时间消耗
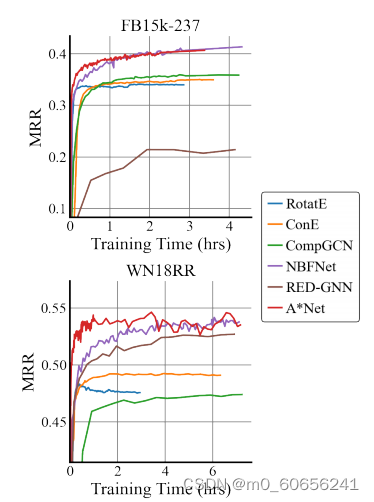
可以看出不论是归纳能力,消耗时间都得到了提升
END















 374
374

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









