







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
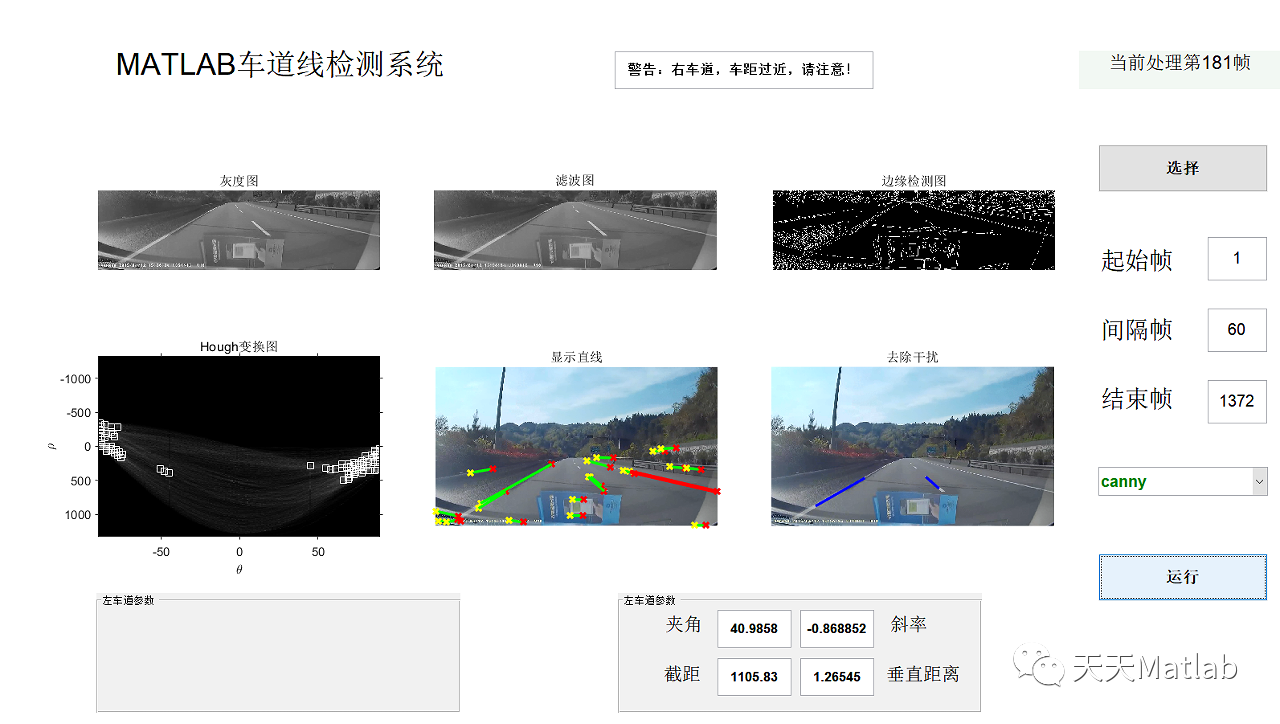
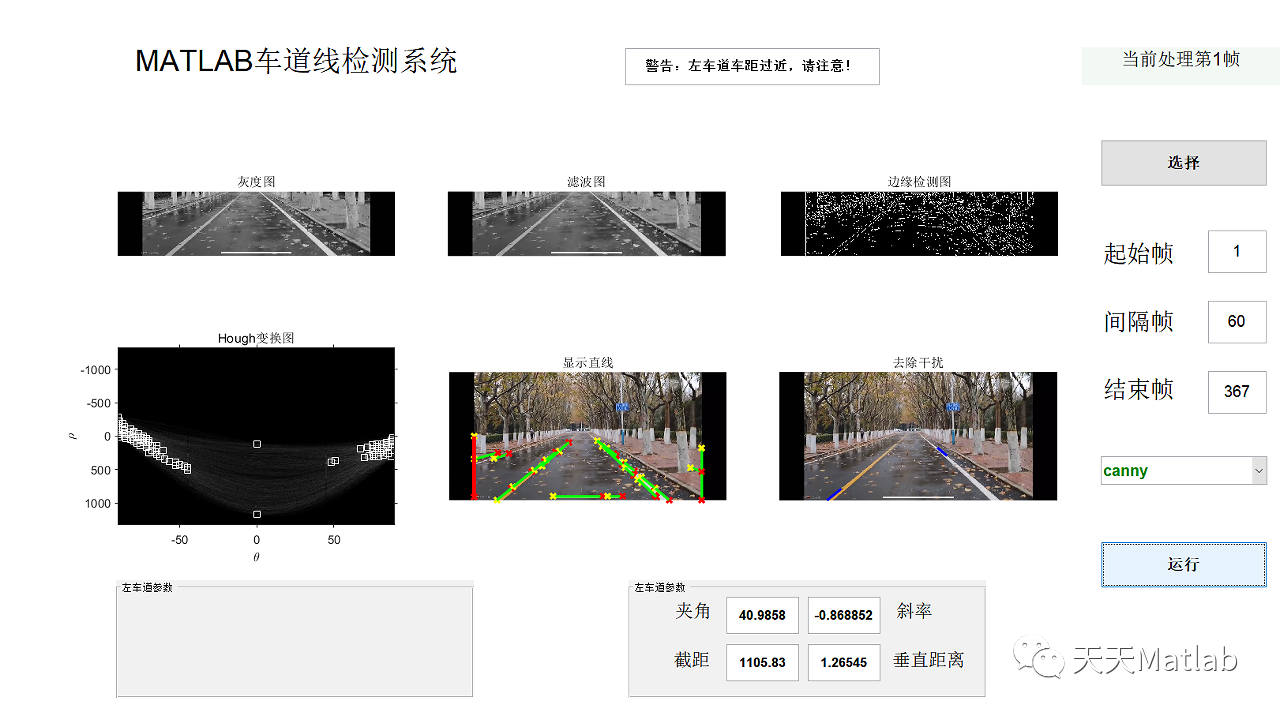
随着全球经济的快速发展,居民的车辆拥有率也在不断攀升,伴随而来的就是日益严重的交通问题。为了减缓交通运输压力,世界各国都加强了对智能交通系统的研究和建设。交通运输未来的发展趋向于智能化,作为一种新兴产业,智能交通已为我国经济不断发展注入了新的动力。车道偏离预警系统作为ITS其中的一部分,在车辆偏离车道行驶时,通过发出警告提醒驾驶人员进而避免危险发生。而构成交通环境的基础因素就是车道线,因此车道线的检测尤为重要。本文主要基于Hough(霍夫)变换原理,以交通视频检测图像为研究对象,对车道检测的关键技术进行了研究。Hough变换作为一种常用的从图像中识别出几何图形的方法,其具有较好鲁棒性,可以在噪声环境比较大的情况下识别出车道直线。 首先,本文大概介绍了智能交通系统及车道预警系统的应用需求,国内外对其的研究及应用现状。
⛄ 部分代码
function varargout = GUI(varargin)
% GUI MATLAB code for GUI.fig
% GUI, by itself, creates a new GUI or raises the existing
% singleton*.
%
% H = GUI returns the handle to a new GUI or the handle to
% the existing singleton*.
%
% GUI('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in GUI.M with the given input arguments.
%
% GUI('Property','Value',...) creates a new GUI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before GUI_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to GUI_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help GUI
% Last Modified by GUIDE v2.5 27-Dec-2022 19:41:34
⛄ 运行结果
⛄ 参考文献
[1] 胡坤福. 基于自适应感兴趣区域的车道线识别技术研究.
[2] 陈杰. 基于隔帧差法的前方车道线内行驶车辆的检测方法:, CN104867332A[P]. 2015.
[3] 吕亚运. 基于机器视觉的车道线偏移检测与预警系统设计与实现[D]. 安徽工程大学, 2016.
[4] 贺凌云. 基于Hough变换的车道检测器的设计[D]. 长安大学, 2014.
[5] 徐嘉雯, 何超, 魏明洋,等. 基于特征提取的车道线快速检测方法研究[J]. 机电工程技术, 2023, 52(2):5.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 748
748











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











