






设X为被估计随机向量,对X的量测为随机向量Z,X基于Z的线性最小方差估计为:
![]()
其中:

估计的均方误差阵为:
![]()
当上述X和Z都服从正态分布时,所得到的估计就是最小方差估计。
设系统方程和量测方程具有离散形式
![]() 1- 1
1- 1
![]() 1- 2
1- 2
式中,f和h为非线性向量函数,![]() 和
和![]() 为不想过的零均值白噪声序列,方差阵为
为不想过的零均值白噪声序列,方差阵为![]() 和
和![]() ,u(k-1)为确定性控制项。则
,u(k-1)为确定性控制项。则![]() 基于
基于![]() 的线性最小方差估计为:
的线性最小方差估计为:
![]() 1- 3
1- 3
其中![]() ,指的是给定条件变量Z从0到k下随机变量X的条件期望。
,指的是给定条件变量Z从0到k下随机变量X的条件期望。
根据线性最小方差估计的线性性质,可得:
令 ,可得:
,可得:

由于![]() 与
与![]() 互不相关,则:
互不相关,则:

由上式推导可得:
 1- 4
1- 4
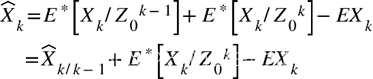
令![]() ,根据最小方差估计公式可得:
,根据最小方差估计公式可得:
 1- 5
1- 5
上式中,均值可近似取为条件均值![]() ,
,
记
 1- 6
1- 6
则
![]() 1- 7
1- 7
将1- 6式子带入1- 4可得:
![]() 1- 8
1- 8
同理,用条件均值近似均值,即![]() ,可估计的均方误差阵:
,可估计的均方误差阵:
![]() 1- 9
1- 9
考虑到![]() 为对称阵,
为对称阵,![]() ,根据上述式子可推:
,根据上述式子可推:
 1- 10
1- 10
上述(1-6), (1-8),(1-10)构成了整个无迹卡尔曼滤波的核心,要进一步确定出增益阵Kk![]() ,并使算法具有递推性,还需用UT变换确定出
,并使算法具有递推性,还需用UT变换确定出![]() 及一步预测值
及一步预测值![]()
计算卡尔曼增益
![]()
系统状态更新
![]()
协方差更新

完整版已经在主页更新














 495
495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









