









图像先经过一个2D的unet结构,这里论文里用的预训练的EfficientNet,然后经过一个论文里提出的FLOSP模块,从2D到3D,不过是一个多尺度的投影,再上采样concate。这里的转换模块个人感觉和FastBEV一样。后续3Dunet是一个简单的编解码网络,加入了空洞卷积和作者提出的一个3DCRP的结构。最后加入一个head完成多类别的一个语义分割 。
3.2D到3D转换(FLoSP)
说实话我感觉这个和FastBEV一样,这个多尺度的图片投影到不同的尺度的3D体素中,然后再聚合不同尺度的3D特征。
4.3D CRP
因为语义分割场景高度依赖于上下文的一个关系,所以论文里在3Dunet底部加入了一个CRP的结构,从而为网络提供了一个全局的感受野。这里因为全局语义分割存在极度的不均衡,所以单纯的二分类其实是次要的,论文里提出了体素与体素之间的一个关系,从而增强模型的上下文之间的关联。这里怎么划分体素之间的关系我有点看不懂原文的描述,原文这里很乱。
二、 VoxFormer
1.摘要
a.提出一种两阶段的框架,使用图像生成完整的3D体素化语义场景。
b.预测图像深度,再生成稀疏的体素,使用transformer进一步得到完整的体素语义场景 。
2.模型结构
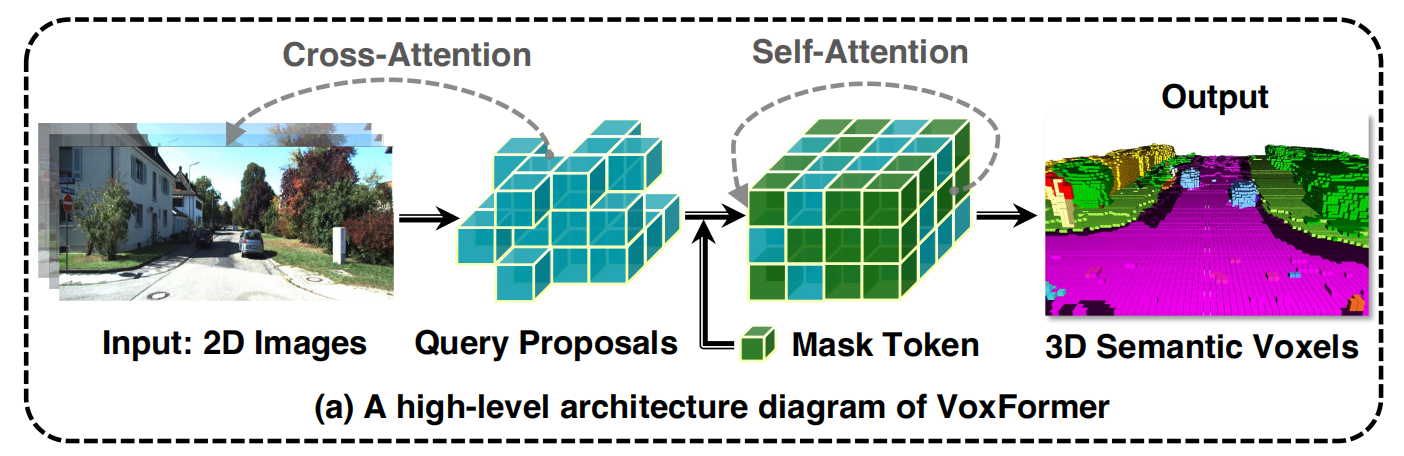

先对图像的特征进行提取,同时对其深度也进行估计,根据相机内外参投影到体素里,得到一个稀疏的Q,这个Q与图像特征进行交叉注意力机制,加上mask token后再做一个自注意力的操作,相当于对语义场景进行补全,最后上采样做多类别语义分割。
3. 第一阶段的query
初始化定义的query是忽略类别的,h*w*z*d,这个尺度相较于最终的语义分割尺度进行了2倍降采样,主要是为了提高模型的一个鲁棒性,防止因为深度预测误差过大,像素点没有落到该有的体素内。
根据深度估计和相机内外参,我们可以得到许多3D空间的点云,但此时这个点云是非常不可靠的,特别是在远处,几个点云决定了一大片区域的深度。为了降低深度容错和提高模型的鲁棒性,使用了一个简化版的unet网络对Min(H*W*D)进行卷积占据预测,输出Mout(h*w*d)表示是否占据。
根据是否占据,我们在q里面选择占据的query出来,组成Qp。这里有个疑问Qp的个数会变化呀?不是固定数量的query也可以吗?这里的好处是跳过空白的区域,只对图像上看到的地方进行query。
4.第二阶段补全query后的语义分割
使用deformable交叉注意力机制,Qp有一个3D坐标,投到图像上有一个参考点,根据偏移和权重,在多个时序图上进行特征的提取。经过几层可变形交叉注意力之后,我们把Qp与mask token结合得到完整的体素特征。然后使用可变形自注意力机制,对完整的体素特征进行细化。然后再上采样到原始的分辨率,对其进行多类别语义分割。
这里的mask token是一个d维的可学习向量,主要用于填充第一阶段没有对应图像的一些体素,同时这些mask token也加入了位置编码,来让其对自己的位置有一定的了解。
三、TPVFormer
1.摘要
a.提出了一种新颖的三维空间表示方法,相较于体素,计算量大大下降,相较于BEV,其对空间的细粒度三维结构表示更加丰富。
b.使用可变形注意力机制生成空间三视图,可以完成任意分辨率的空间占据表示。
2.模型结构
图像先通过backbone和Neck提取相应的特征,然后TPV query向图像进行可变形注意力机制查询,再加上三个平面之间的特征交互,最终生成TPV的特征,我们根据这个图,可以插值得到最终3D空间的占据预测。这里的TPV query是最终三个视图里面的每个像素点,t∈T。
3.Image cross attention
在进入这个模块时,先对TPV query添加位置编码。 考虑到TPV query的个数以及图像像素的个数,所以我们不进行全局注意力机制,而使用可变形注意力机制。比如一个俯视图的TPV query,他有一个xy,那么我们对z进行间隔采样,会得到许多3D点,然后我们对这些3D点向一张图像做投影,可以得到一些有效投影点,对这些有效投影点做可变形注意力机制,最后对六张图像的可变形注意力机制结果求平均。

4.Cross-View Hybrid-Attention
因为上面每个视图单独查询图像特征,他们之间并没有充分的交互,所以提出交叉视图混合注意力机制,有利于上下文特征的提取。比如俯视图上一个点,我们直接在其周围生成一些参考点,然后沿着z生成几个3D点,投影到前视图和左视图,又能得到几个参考点,对这些参考点做可变形注意力机制,得到最终的特征。 
四、SurroundOcc
1.摘要
a.使用由粗到细的思想策略,先生成小分辨率的体素特征,再逐步上采样,生成密集的体素特征。
b.针对占据网络稀疏的GT监督,论文提出了一种生成密集占据标签的方法。
2.模型结构
首先提取图像的多尺度特征信息,然后使用类似于bevformer的思想,使用可变形交叉注意力机制,完成2D到3D的特征转换,后续再加一些3D卷积。把低分辨率的3D体素特征逐层上采样合并,最后加head完成预测。我们对不同尺度的3D体素都施加监督,不过监督权重呈衰减形式,从上到下由大到小。
3.密集占据真值生成
多帧点云拼接,将点云分为动静态,静态根据车身位姿变化堆叠在一起,然后动态的根据track id合并填充进去。这样聚合完还是会存在一些空洞的区域,根据其邻域中的空间分布计算法向量,使用poisson曲面重建算法来进行补全。最后使用最近邻算法来对空白网格的语义进行填充。
五、OpenOcc
1.摘要
为了做好运维面试路上的助攻手,特整理了上百道 【运维技术栈面试题集锦】 ,让你面试不慌心不跳,高薪offer怀里抱!
这次整理的面试题,小到shell、MySQL,大到K8s等云原生技术栈,不仅适合运维新人入行面试需要,还适用于想提升进阶跳槽加薪的运维朋友。

本份面试集锦涵盖了
- 174 道运维工程师面试题
- 128道k8s面试题
- 108道shell脚本面试题
- 200道Linux面试题
- 51道docker面试题
- 35道Jenkis面试题
- 78道MongoDB面试题
- 17道ansible面试题
- 60道dubbo面试题
- 53道kafka面试
- 18道mysql面试题
- 40道nginx面试题
- 77道redis面试题
- 28道zookeeper
总计 1000+ 道面试题, 内容 又全含金量又高
- 174道运维工程师面试题
1、什么是运维?
2、在工作中,运维人员经常需要跟运营人员打交道,请问运营人员是做什么工作的?
3、现在给你三百台服务器,你怎么对他们进行管理?
4、简述raid0 raid1raid5二种工作模式的工作原理及特点
5、LVS、Nginx、HAproxy有什么区别?工作中你怎么选择?
6、Squid、Varinsh和Nginx有什么区别,工作中你怎么选择?
7、Tomcat和Resin有什么区别,工作中你怎么选择?
8、什么是中间件?什么是jdk?
9、讲述一下Tomcat8005、8009、8080三个端口的含义?
10、什么叫CDN?
11、什么叫网站灰度发布?
12、简述DNS进行域名解析的过程?
13、RabbitMQ是什么东西?
14、讲一下Keepalived的工作原理?
15、讲述一下LVS三种模式的工作过程?
16、mysql的innodb如何定位锁问题,mysql如何减少主从复制延迟?
9、8080三个端口的含义?
10、什么叫CDN?
11、什么叫网站灰度发布?
12、简述DNS进行域名解析的过程?
13、RabbitMQ是什么东西?
14、讲一下Keepalived的工作原理?
15、讲述一下LVS三种模式的工作过程?
16、mysql的innodb如何定位锁问题,mysql如何减少主从复制延迟?
17、如何重置mysql root密码?















 399
399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









