







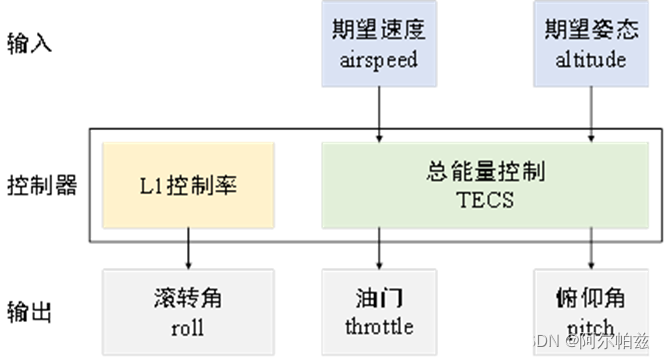
这里讲讲无人机的路径跟踪控制相关知识,路径跟踪需要制导率(平面)和控制器,在无人机中较为常用的是L1制导率,不过L1制导率是控制无人机在二维平面上的转向,此处还引入总能量控制,控制无人机的高度。
L1制导率
多旋翼无人机,跟踪航路点时只需要将飞行速度方向对准下一个航路点,跟踪航线也仅需首先飞到航线上距离当前位置最近的点即可。
而这项任务对于固定翼无人机相对复杂。因为固定翼无人机的速度方向需要通过航向来改变,而航向则需要通过滚转来改变,这就使得滚转角与速度方向之间形成了近似二阶环节的过程,这通常可以运用导弹的比例导引法来实现航路点跟踪。比例导引法的基本原理就是让飞行器速度矢量在空间中的转动角速度正比于飞行器与目标间的视线角变化率,对于航路点这一静止目标,只需要无人机与航路点之间的距离足够,就可以保证准确抵达下一个航路点,而对于航线跟踪,则需要选择一个虚拟的目标点使得无人机首先向航线靠近,然后再逐步将方向对准航线方向。例如现在被广泛使用的L1制导算法,就是在航线上选择与无人机距离为L1的参考点,然后根据速度方向与到参考点连线方向之间的夹角计算横向机动的需用过载,进而实现航线跟踪。
总能量控制--位置控制器
飞机的总能量包括势能和动能总和
其余公式不展开写了,总结下来就是速度和高度成反比,速度小则高度高。推力(通过油门控制)可以增加飞机的总能量。利用俯仰角来维持势能(高度)和动能(真空速)的特定平衡点。
姿态控制器
姿态控制器采用级联方式
将角度误差输入到P环节,就能得到角速度(大地坐标系下的),然后要乘以旋转矩阵,得到机体坐标系下的角速度。这部分的图如下所示。【外环计算姿态设定值和估计值的误差,并将误差乘以比例控制器P,得到角速率设定值。】
再进行将角速度误差通过PI环节,得到所需要的角加速度。这部分没画图,参考文献1里有。【内环计算角速率误差,用(比例+积分)PI控制器产生一个所需要的角加速度。】

然后可以根据期望的角加速度和系统先验信息,通过控制分配 (又叫混控),计算出执行机构 (副翼,水平尾翼,垂直尾翼,等) 的角偏移量。 此外,由于控制面在高速时更有效,而在低速时效率较低,因此根据巡航速度调整的控制器使用空速测量值进行缩放(如果使用这样的传感器)。
参考文献
1、PX4中关于TECS部分的描述控制器图解 | PX4 Guide (main)
2、下面这篇博客里写了L1制导的详细推导,包括将加速度式子写成二阶微分方程,设定自然频率和周期的过程,比较详细,通俗易懂。















 825
825











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









