







主要介绍固定翼无人机的主要组成部分
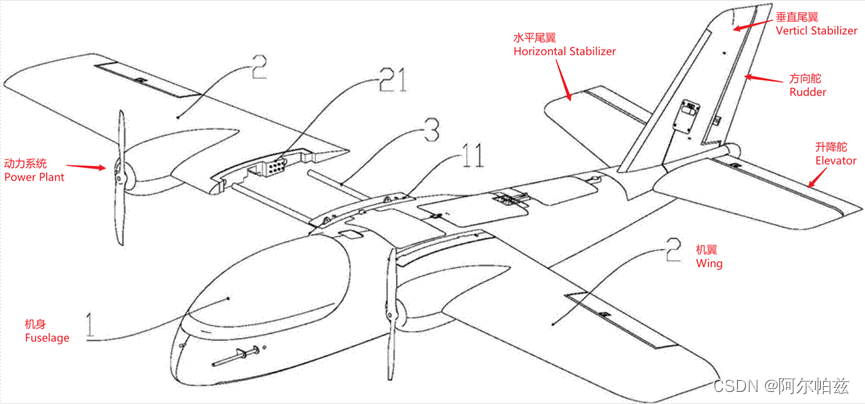
常规布局的固定翼飞行器基本组成可以分为机身、机翼、水平尾翼、垂直尾翼、动力系统。
机身(Fuselage)作为飞行器的载体,连接各个部件及翼面,也承担着装载各部分载荷的功能。
机翼(Wing)主要负责提供维持飞行器飞行的升力。机翼上可以操纵发生偏转的部分叫做舵面,操纵飞机发生滚转的舵面叫做副翼(Aileron),部分飞机可能有额外的用于增升的后缘襟翼(Flap)或前缘缝翼(Slat),用于减速增阻的扰流板(Spoiler)。
水平尾翼(平尾、水平安定面、Horizontal Stabilizer)和垂直尾翼(垂尾、垂直安定面、Vertical Stabilizer)分别负责控制飞行的俯仰稳定性、航向稳定性。平尾上的操纵舵面称为升降舵(Elevator),负责控制飞行器的俯仰;垂尾上的操纵舵面称为方向舵(Rudder),负责控制飞行器的偏航。
动力系统(Power Plant)主要提供飞行器飞行动力,对于无人机的动力系统而言,主要由电机或油机驱动螺旋桨旋转提供拉力,必要时在电机或油机与螺旋桨之间存在齿轮组进行转速、效率转换。
飞行器在三维空间的一共有6个运动自由度(6DOF),分别为平行于x, y, z轴的平动(前后、左右、上下)和绕x, y, z轴的转动(滚转Roll、俯仰Pitch、偏航Yaw)。这六个自由度方向上的运动构成了飞行器在三维空间的运动。
固定翼飞行器仅能通过舵面偏转控制姿态,在控制姿态的基础上控制飞行朝向,实现三维空间中的飞行,这也是固定翼飞行器相较于旋翼飞行器的控制难点所在。因此固定翼飞行器的飞行控制一般划分为上层的规划控制和底层控制。规划控制负责规划出飞行航迹,并根据航迹生成姿态控制指令或速度、加速度控制指令;这些控制指令由底层控制器接收,最终计算出各舵面的偏转值。

















 1087
1087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









