







 DGS-SLAM是一种结合几何和语义信息的RGBDSLAM方法,旨在提升动态环境中的鲁棒性和效率。它通过动态目标检测模块和语义分割策略减少动态目标对相机运动估计的影响,实现了更准确的场景分割和跟踪。在TUM和Bonn数据集上的实验显示,DGS-SLAM在动态场景中具有高鲁棒性和更快的速度,优于其他先进系统。
DGS-SLAM是一种结合几何和语义信息的RGBDSLAM方法,旨在提升动态环境中的鲁棒性和效率。它通过动态目标检测模块和语义分割策略减少动态目标对相机运动估计的影响,实现了更准确的场景分割和跟踪。在TUM和Bonn数据集上的实验显示,DGS-SLAM在动态场景中具有高鲁棒性和更快的速度,优于其他先进系统。
论文信息
题目:
DGS-SLAM:A Fast and Robust RGBD SLAM in Dynamic Environments Combined by Geometric and Semantic Information
DGS-SLAM:一种结合几何和语义信息的动态环境下快速、鲁棒的RGBD SLAM
论文地址:
https://scholar.google.com/scholar?q=DGS-SLAM:A+Fast+and+Robust+RGBD+SLAM+in+Dynamic+Environments+Combined+by+Geometric+and+Semantic+Information+&hl=zh-TW&as_sdt=0,5
发表期刊:
Remote Sens. 2022, 14(3), 795; https://doi.org/10.3390/rs14030795
标签
语义分割、改进orb—slam3、
摘要
视觉同步定位与测绘(VSLAM)是机器人在未知环境中实现完全自主运动和探索的前提。目前已经出现了许多令人印象深刻的VSLAM系统,但它们大多依赖于静态世界假设,这限制了它们在真实动态场景下的应用。为了提高系统在动态环境下的鲁棒性和效率,提出了一种基于几何信息和语义信息相结合的动态RGBD SLAM (DGS-SLAM)。首先,提出了一种基于多项式残差模型的动态目标检测模块,该模块结合相邻帧的运动残差信息和语义分割模块的潜在运动信息,对场景进行运动分割;其次,设计了一种基于特征点分类结果的摄像机姿态跟踪策略,实现了鲁棒系统跟踪。最后,根据动态分割和摄像机跟踪的结果,设计了基于语义帧选择策略的语义分割模块,用于提取场景中潜在的运动目标。TUM和Bonn公共数据集的广泛评估表明,DGS-SLAM在动态场景中比最先进的动态RGB-D SLAM系统具有更高的鲁棒性和速度。
内容简介
我们扩展了ORB-SLAM3的工作,提出了一种基于几何模型和语义信息相结合的快速、鲁棒的动态RGB-D SLAM系统(DGS-SLAM)。本文的主要贡献如下:•提出了一种动态目标检测算法,以减小动态目标对摄像机自运动估计的影响。它结合了当前帧的几何运动信息和历史语义帧的潜在运动信息,自适应地分割出动态对象。•设计了基于语义帧选择策略的语义分割模块。它能在场景和动态物体发生变化时提供足够的潜在运动信息,显著降低了系统的计算成本。•使用最先进的动态SLAM方法在公共TUM和Bonn数据集上进行了广泛的实验。实验结果表明,DGS-SLAM具有较好的定位精度和运行时间。
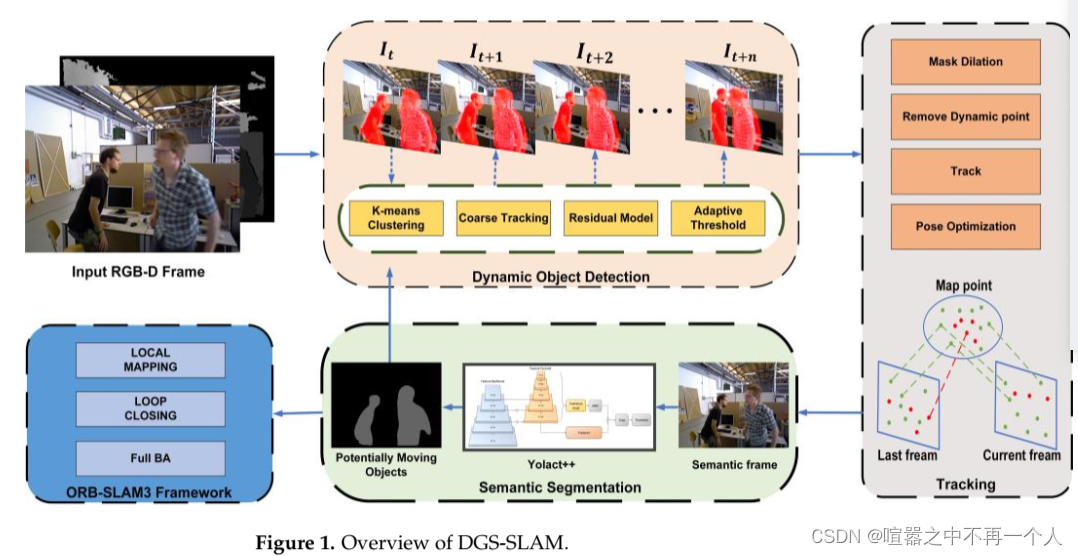
概述了基于RGB-D模式的历史语义帧g信息的DGS-SLAM算法。第二,当前的ORB-SLAM3如图1所示。当获得新的语义帧时,我们的系统将从历史语义帧的信息开始。其次,采用了改进的电流跟踪模块。然后输入th,完成场景的运动分割和摄像机自我运动估计。首先,我们提出了一个改进的跟踪模块。然后输入动态目标检测模块,对各个语义分割模块中的运动目标进行有效的分割,以进行判断。如果基于当前帧的几何运动信息和势能的语义帧满足,那么语义帧中的势能运动信息就是历史语义帧的运动信息。第二,目前的框架姿态是轻量级深度学习网络。最后,利用改进的跟踪模块进行后端优化计算。然后,将当前帧输入到轻量级深度学习网络中。最后,使用ORB-SLAM3的后端op模块维护当前map.Com语义分割模块进行判断。如果使用ORB-SLAM3的语义帧选择策略模块来维护当前映射。利用ORB-SLAM3对跟踪线程进行了修改,添加了满足条件的fol,利用nal ORB-SLAM3对跟踪线程进行了修改,添加了fol轻量级深度学习网络,提取了语义帧中的潜在运动信息。最后,利用ORB-SLAM3的后端优化和闭环es:模块维护当前映射。与原来的ect检测模块相比:首先计算当前ORB-SLAM3的初始姿态,修改跟踪线程,增加以下两个模块:,粗跟踪算法计算初始p。其次,我们使用k均值算法1。动态目标检测模块:首先,我们计算当前g算法的初始姿态。其次,利用K-means alg偏位聚类,然后利用粗跟踪算法建立聚类重构框架的残差模型;其次,利用K-means算法进行聚类,然后建立聚类的残差模型,对先验动态对象的语义信息进行空间聚类,然后建立聚类的残差模型,对先验动态对象的语义信息进行空间聚类。最后,结合先验动态对象的语义信息和当前帧的分布计算自适应阈值,结合当前帧的残差分布计算自适应阈值进行场景的运动分割,完成场景的运动分割。2.语义分段。语义分割模块:语义分割模块先做一个表述模块:语义分割模块先做一个输入帧。如果是语义帧,实例分割就是对输入帧的判断。如果是语义帧,实例分割就是输入帧。如果是语义帧,则实例分割是对潜在动态对象进行语义标签和掩码,潜在动态对象的语义标签和掩码是将潜在动态对象的语义标签和掩码输入到动态对象检测模块。麦克风对象检测模块。
评价
本文提出了一种适用于动态环境的鲁棒RGB-D SLAM系统。为了减少动态目标对摄像机自我运动估计的影响,设计了基于语义帧的语义分割模块和基于残差模型的动态目标检测模块。其中,语义分割模块结合场景运动和动态对象对输入帧进行判断。如果满足语义帧选择策略,则进行实例分割,生成潜在动态对象的掩码,并将其作为先验运动信息输入动态对象检测模块。动态目标检测模块首先对当前帧进行空间聚类。然后结合几何信息和先验信息建立残差模型。最后,利用历史语义帧的先验运动信息和当前帧的几何残差信息计算自适应阈值进行场景分割。此外,我们结合检测结果对ORB-SLAM3的跟踪算法进行了改进,使其能够在动态环境中稳定稳定地工作。我们对TUM RGB-D数据集以及Bonn RGB-D动态数据集进行了定量评估,并将结果与其他最先进的动态VSLAM方法进行了比较。实验结果表明,该方法在保持接近实时运行速度的同时,在动态环境中实现了最先进的定位精度和鲁棒性。在未来的工作中,我们计划向两个方向扩展DGS-SLAM。首先,我们将引入基于学习的深度聚类方法,如PCIA[45],进一步提高分割结果。其次,我们将探索动态目标的跟踪和预测,这是多机器人协作、虚拟现实和自动驾驶工作的基础


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









