







#include <iostream>
#include <ros/ros.h>
#include <serial/serial.h>
#include<geometry_msgs/Twist.h>
using namespace std;
//运行打开速度控制插件: rosrun rqt_robot_steering rqt_robot_steering
//若串口访问权限不够: sudo chmod 777 /dev/ttyTHS1
//发送和接受数组
uint8_t senddata[5] = {0x01, 0x02, 0x03, 0x04,0x05};
uint8_t recdata[100] = {0};
//回调函数
void rc_cmdvel_callback(geometry_msgs::Twist vel_msg)
{
ROS_INFO("lx:%.2f",vel_msg.linear.x);//相当于带时间戳的print
ROS_INFO("ly:%.2f",vel_msg.linear.y);
ROS_INFO("lz:%.2f",vel_msg.linear.z);
ROS_INFO("ax:%.2f",vel_msg.angular.x);
ROS_INFO("ay:%.2f",vel_msg.angular.y);
ROS_INFO("az:%.2f",vel_msg.angular.z);
ROS_INFO("\n");
}
int main(int argc, char** argv) {
ros::init(argc,argv,"serial_node");//初始化ROS节点
//*********************************话题订阅配置*************************************
ros::NodeHandle nh;
//
ros::Subscriber sub=nh.subscribe("/cmd_vel",5,rc_cmdvel_callback);//订阅者1 >订阅abc_test话题 缓冲区长度5 回调函数为rc_callback1
//ros::Subscriber sub2=nh.subscribe("s2_test",5,rc_callback2); //订阅者2 订阅abc2_test话题
//*****************************************串口配置***********************************
serial::Serial sp;//定义串口对象
try{
sp.setPort("/dev/ttyTHS1");//设置串口名称
sp.setBaudrate(9600);//波特率
sp.setBytesize(serial::bytesize_t::eightbits);//数据位--8位
sp.setParity(serial::parity_t::parity_none);//校验位--无
sp.setStopbits(serial::stopbits_t::stopbits_one);//停止位--1位
sp.setFlowcontrol(serial::flowcontrol_t::flowcontrol_none);//无串口流控
serial::Timeout to=serial::Timeout::simpleTimeout(1000);
sp.setTimeout(to);//设置Timeout
sp.open();//打开串口
}
catch(serial::IOException& e){
ROS_ERROR_STREAM("Unable to open port.");
return -1;
}
if(sp.isOpen())//判断串口是否打开
{
ROS_INFO_STREAM("Com is initialized");
}
else
{
ROS_ERROR_STREAM("Unable to open port.");
return -1;
}
//******************************************************************************************
ros::Rate loop_rate(1);
while(ros::ok()){
//******************************************串口相关********************************************
//发送数据
sp.write(senddata,5);//将u8类型的数组的前x个数据写入缓冲区
//获取缓存区数据
size_t sn=sp.available();//获取缓冲区字节数
if(sbrk != 0)//如果缓冲区有字节
{
sn = sp.read(recdata, sn);//从缓冲区读n个字节到u8数组中
for(int i = 0; i < sn; i++)
{
//16进制显示接受到的数据
//cout << std::hex << (recdata[i] & 0xff) << " ";
ROS_INFO("%d",recdata[i] & 0xff );
}
}
//*******************************************ROS话题相关*************************************
ros::spinOnce();//监听消息包
// 以1HZ的频率
loop_rate.sleep();
}
sp.close();
return 0;
}
cmakelist:
cmake_minimum_required(VERSION 3.0.2)
project(myserial)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
serial
geometry_msgs
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES myserial
# CATKIN_DEPENDS roscpp rospy rosserial std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/myserial.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/myserial_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_myserial.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
add_executable(serial_node src/ser.cpp)
target_link_libraries(serial_node
${catkin_LIBRARIES}
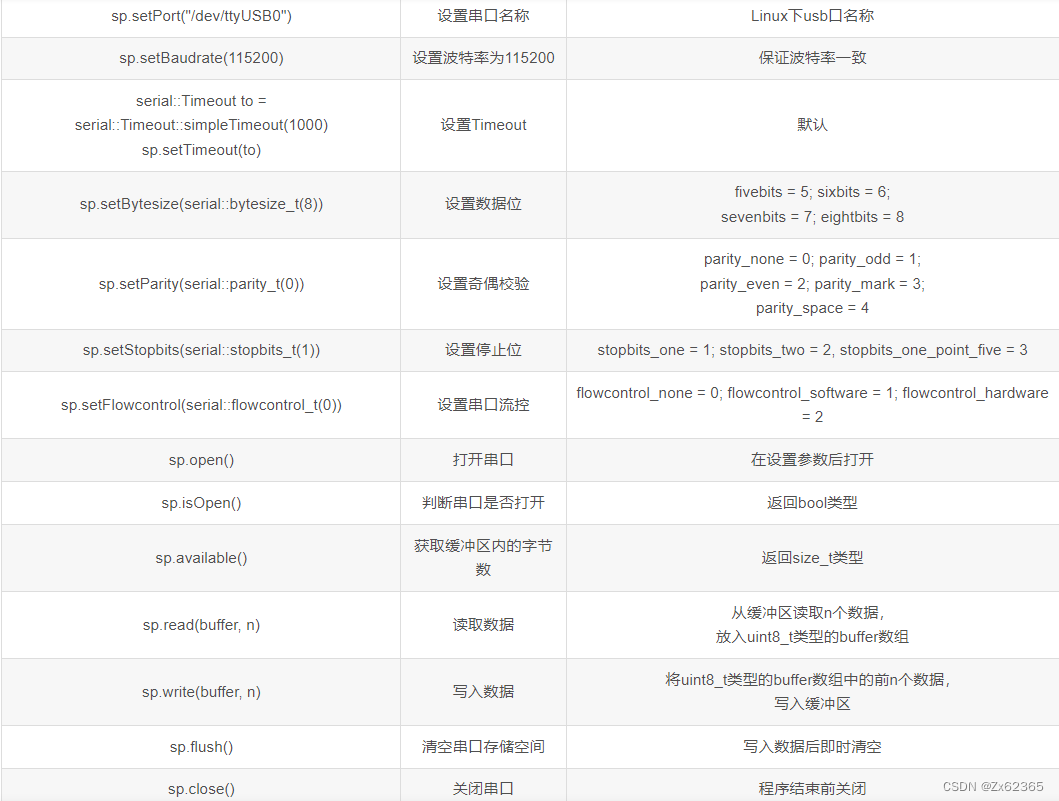
)常用API说明:
















 2161
2161

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











