






 本文介绍了MAGCOM算法与ICCP算法的工作原理及其在高精度定位服务中的应用。MAGCOM算法通过平动搜索实现定位,而ICCP算法在此基础上增加了旋转搜索,提高了定位精度并能修正航向误差。实验结果表明,在存在航向偏差的情况下,ICCP算法的精度优于MAGCOM算法。
本文介绍了MAGCOM算法与ICCP算法的工作原理及其在高精度定位服务中的应用。MAGCOM算法通过平动搜索实现定位,而ICCP算法在此基础上增加了旋转搜索,提高了定位精度并能修正航向误差。实验结果表明,在存在航向偏差的情况下,ICCP算法的精度优于MAGCOM算法。
文章目录
前言
一,MAGCOM算法
二,ICCP算法
三,MAGCOM算法与ICCP算法的对比
四,总结
前言
华为高精度定位服务使用GNSS定位,实时动态差分等技术,提供亚米级定位服务,实现了车道级识别且车辆随着实际车道变化而变化。下面我们会介绍相同应用场景的两种常规算法,并且对两种算法进行对比分析。
一,MAGCOM算法
算法过程:载体单位在运行时通过传感器获取地磁场的特征值序列,随后,搜索当地标准的地磁场数据库得到新的序列;两组序列确定最佳序列便是匹配位置。
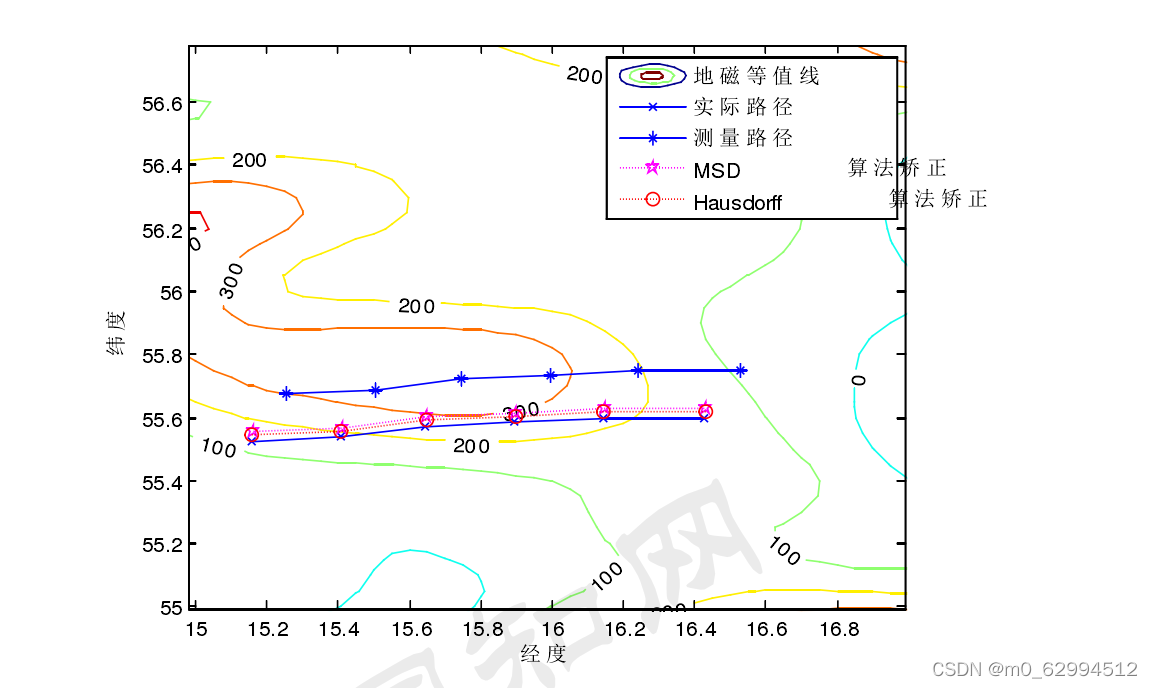
MAGCOM算法有许多,研究者对均方差算法和基于Hausdorff距离的算法进行了仿真
如下图所示,假设不存在航向误差时,载体单位在起始位置处的误差纵向为0.17°,横向为0.1°,对磁场的测量噪声是0.5nT的白噪声。研究者通过两种算法进行了仿真,从图中可以看出两种算法的精度都非常低,只能粗略匹配。
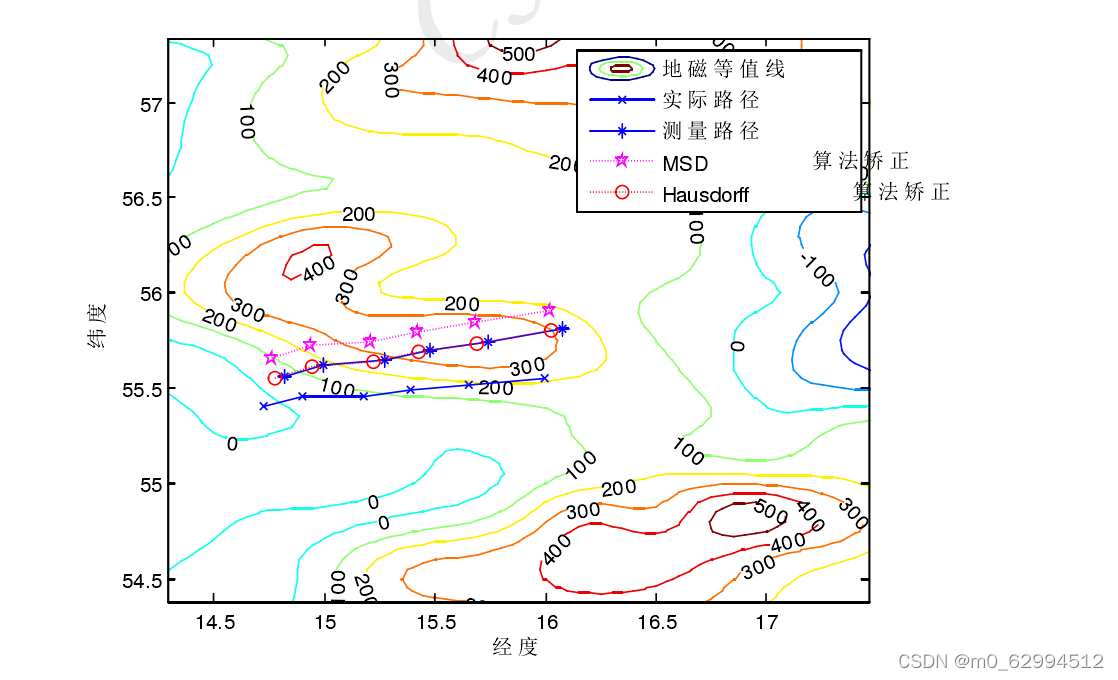
如下图所示当存在航向误差时,研究者对着两种算法的匹配效果进行了仿真。假设载体单位的初始位置误差的纵向0.17°,横向0.13°,航向的偏差叫是5°,磁场的测量结果中有强度为0.2nT的白噪声。通过两种算法对航行进行了矫正。从图像可知,两种算法在航迹矫正方面的效果都不理想,与实际航迹有很大差距,起始的航行误差都没有能被很好的修正。
二,ICCP算法
算法过程:在MAGCOM的基础上ICCP能够旋转搜索最近点的来更好的修正误差,从原理来分;MAGCOM为平动搜索,ICCP既能平动搜索又能旋转搜索。这样能大大提高精度但是算法计算复杂。
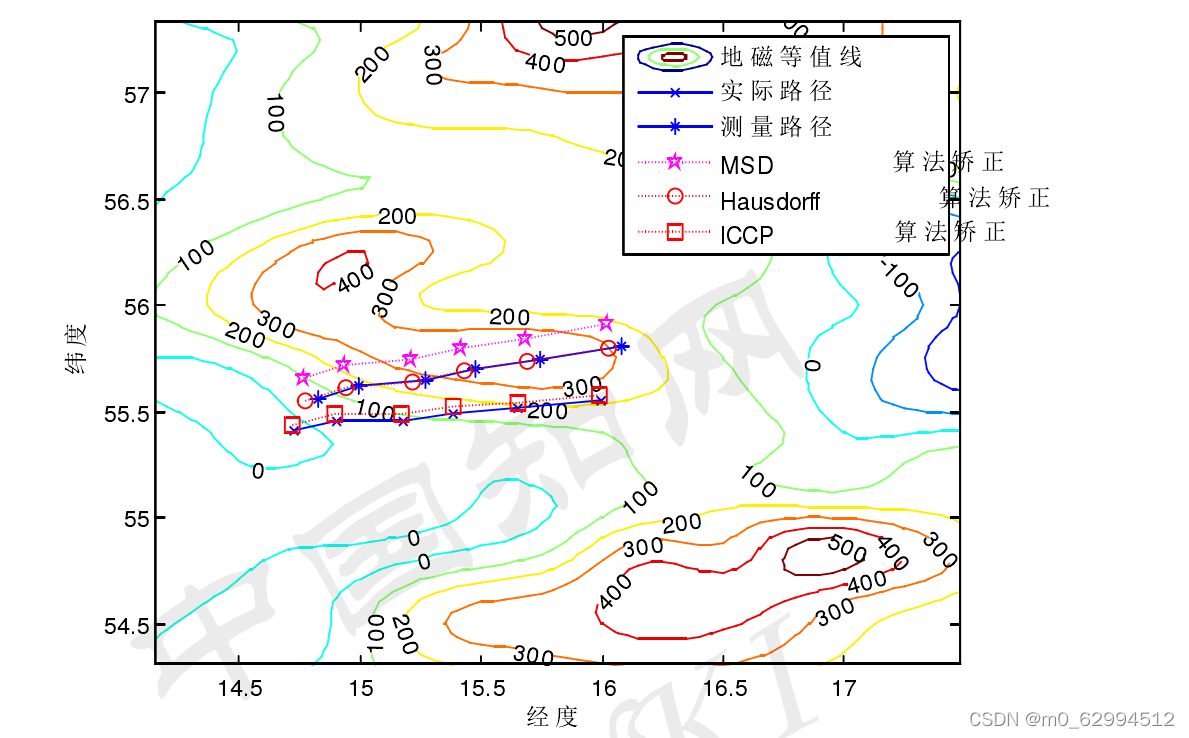
如下图所示研究将均方差算法,Hausdorff距离算法以及ICCP算法一起做了仿真。假设载体单位的航向偏角为2°,起始位置误差在纵向上是0.18°,在横向上是0.12°,测量结果中带有0.5nT强度的白噪音。实验表明载体单位上的惯导系统的指示路径与它的实际路径之间如果误差过大则精度会明显降低,从图中可以看出如果有航向偏差,ICCP的精度明显高于MAGCOM的两类算法。
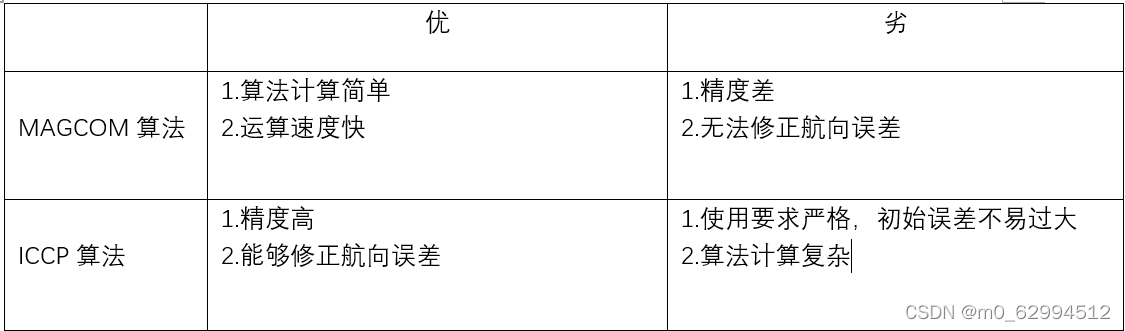
三,MAGCOM算法与ICCP算法的对比
四,总结
MAGCOM算法和ICCP算法的特点很鲜明,由于MAGCOM是平动搜索所以算法简单运算速度快,也因为是平动搜索导致精度差也没有能力去修正航向。ICCP算法在此基础上能够旋转搜索所以精度高并且能够修正航向这也使得它的算法计算复杂。

















 1507
1507

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









