







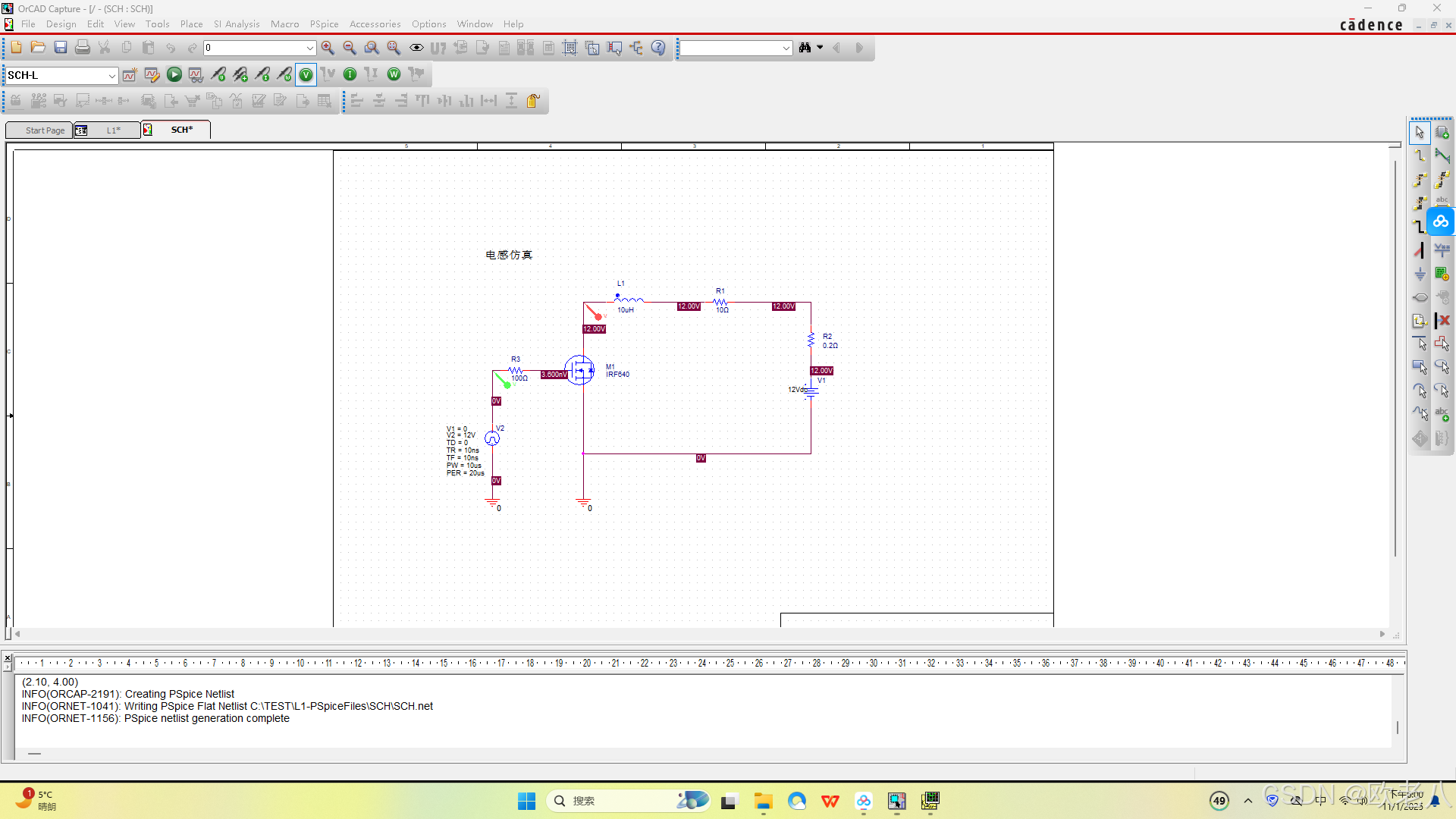
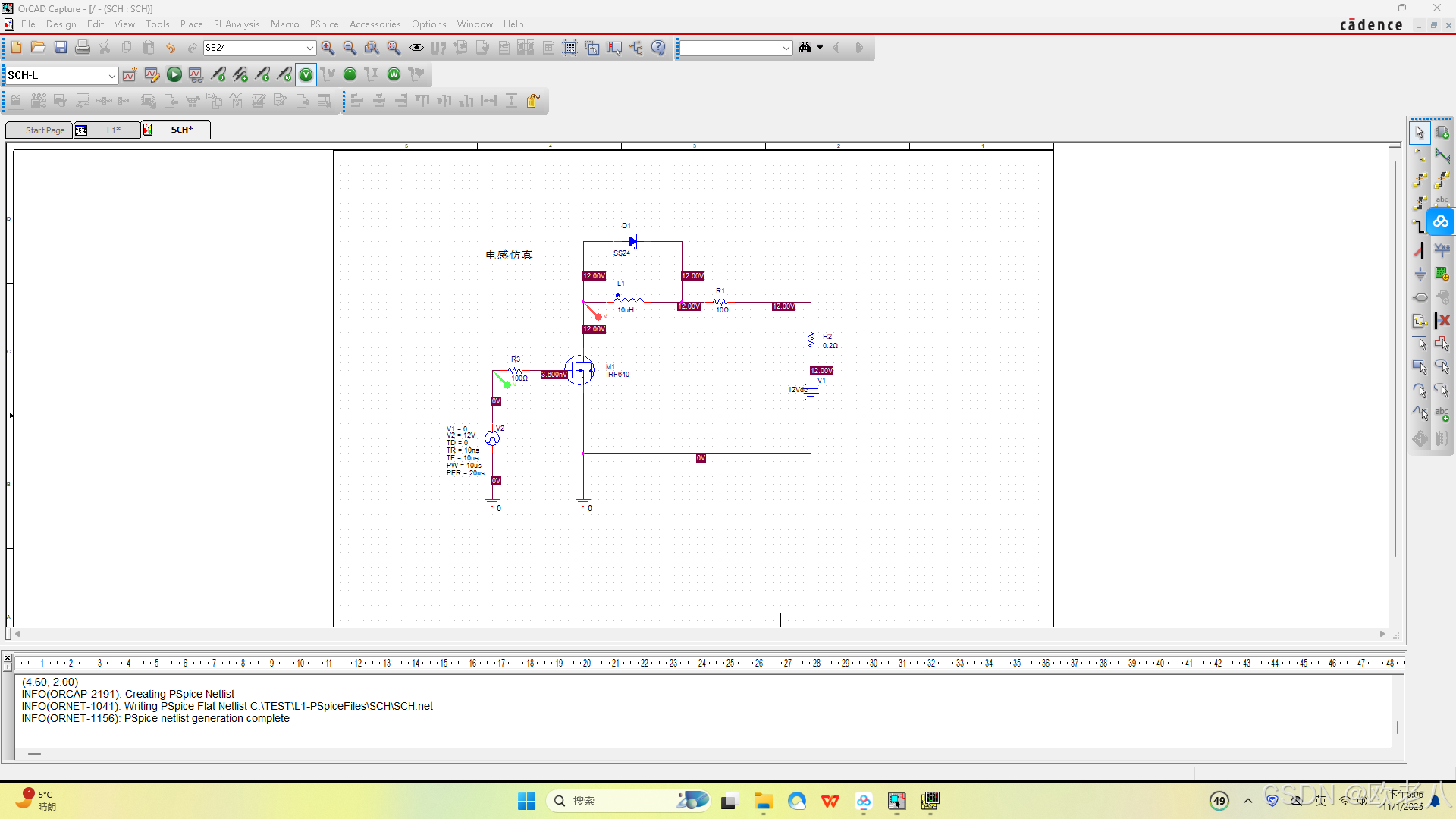
1.使用OrCAD软件进行仿真(不能有中文路径)
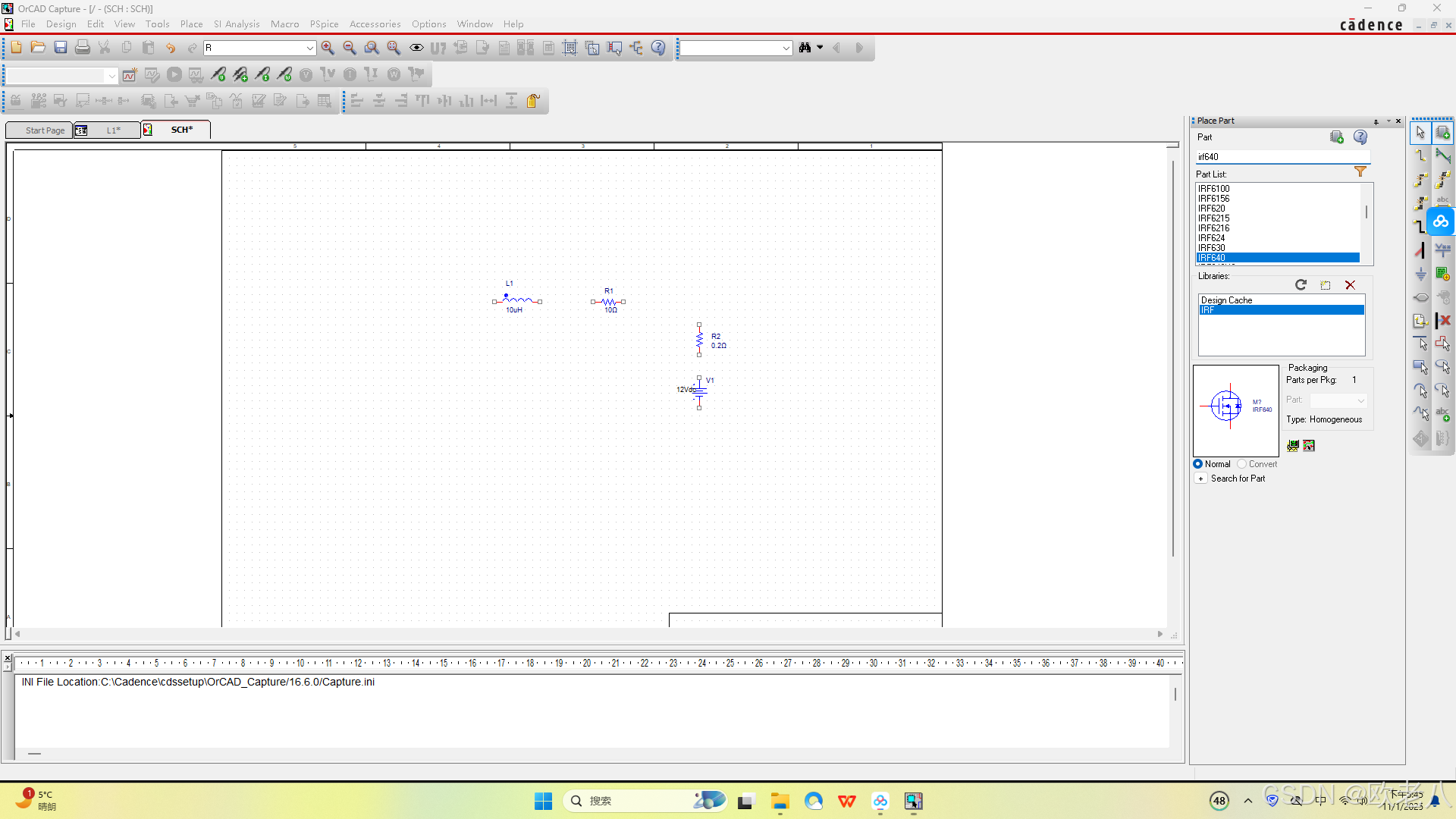
2.放置元器件(电阻,电感,脉冲),并进行连线,设置相关参数,放置探针
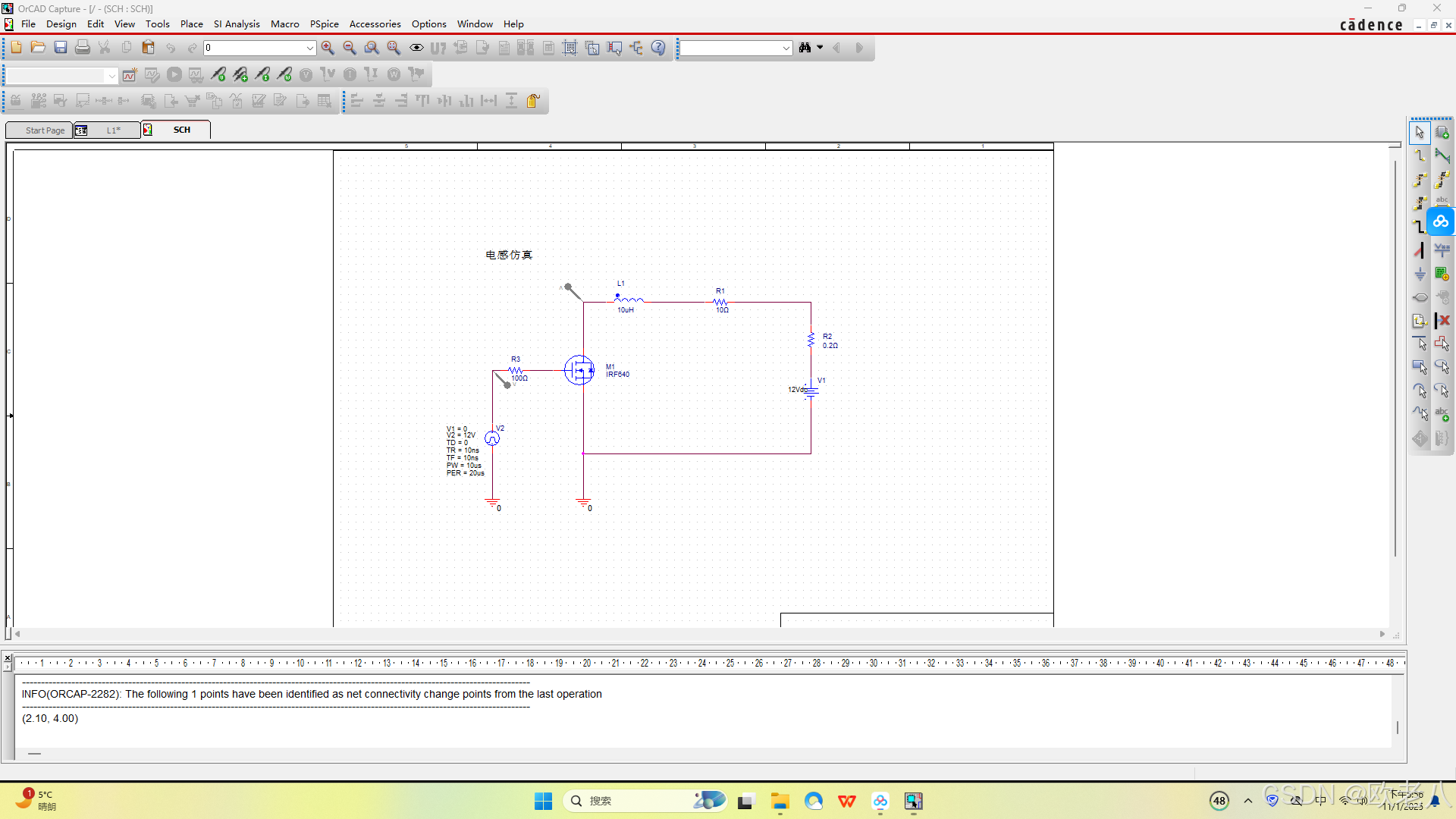
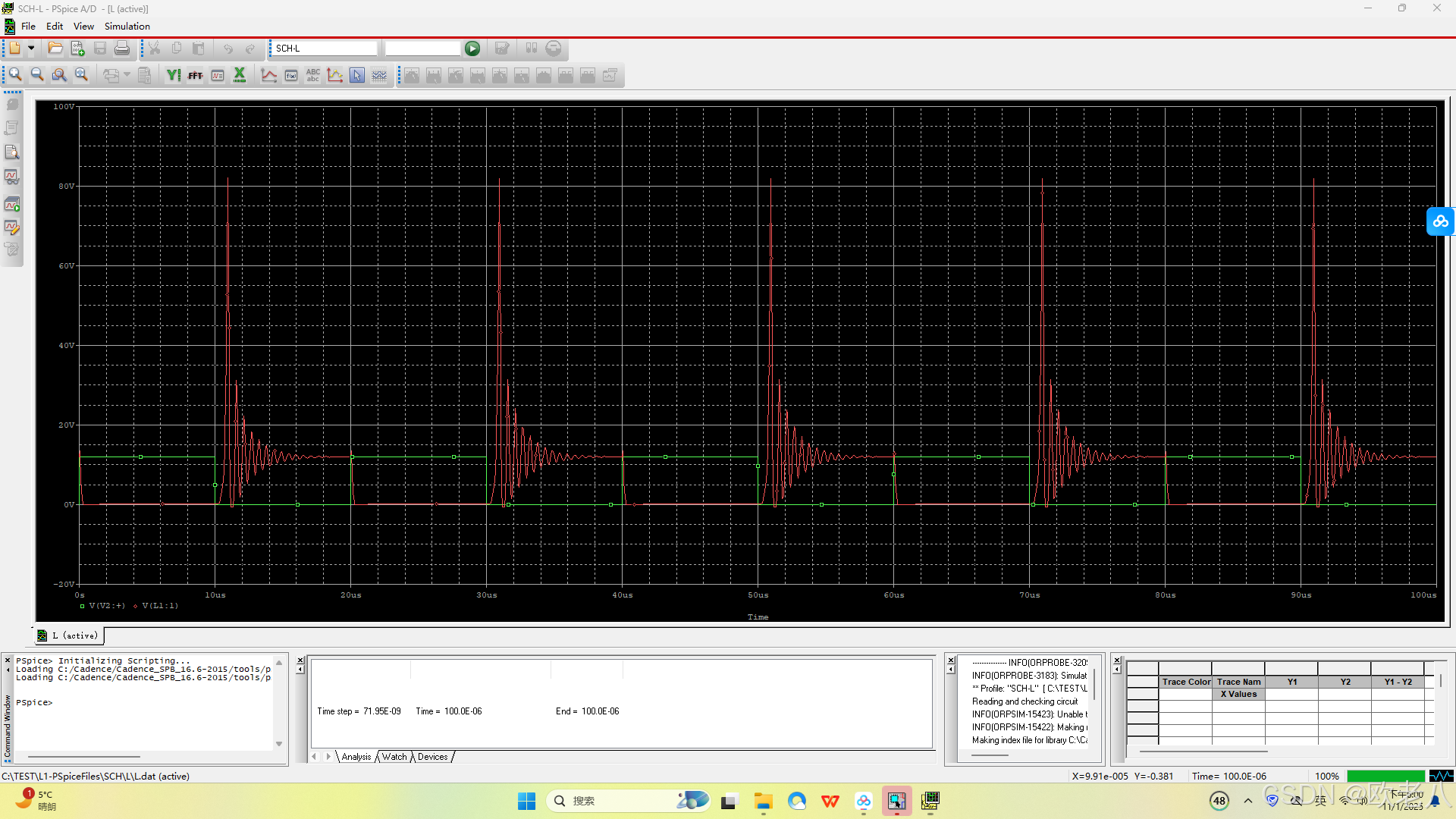
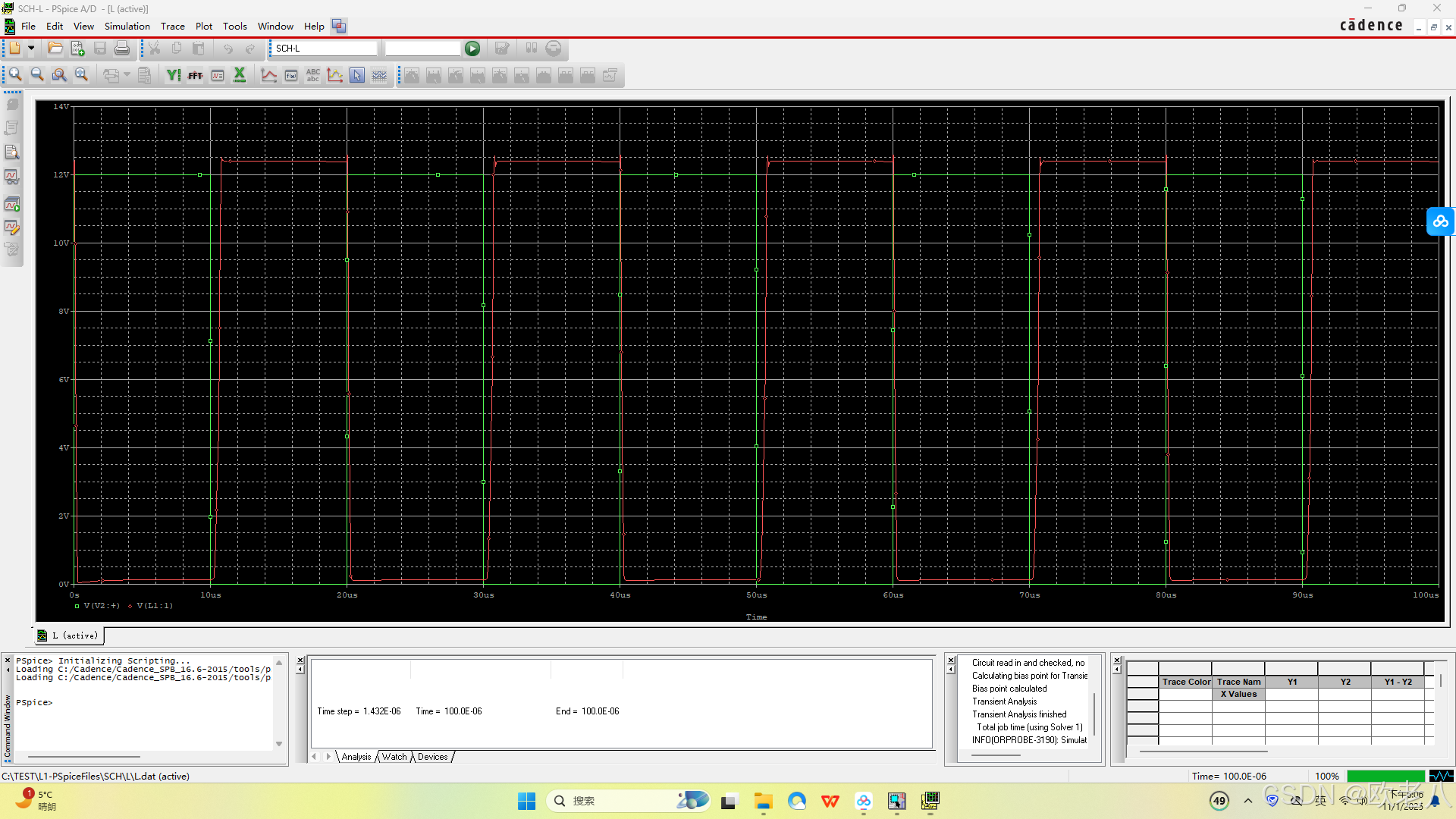
3.进行仿真,看到红色电压明显突然升高
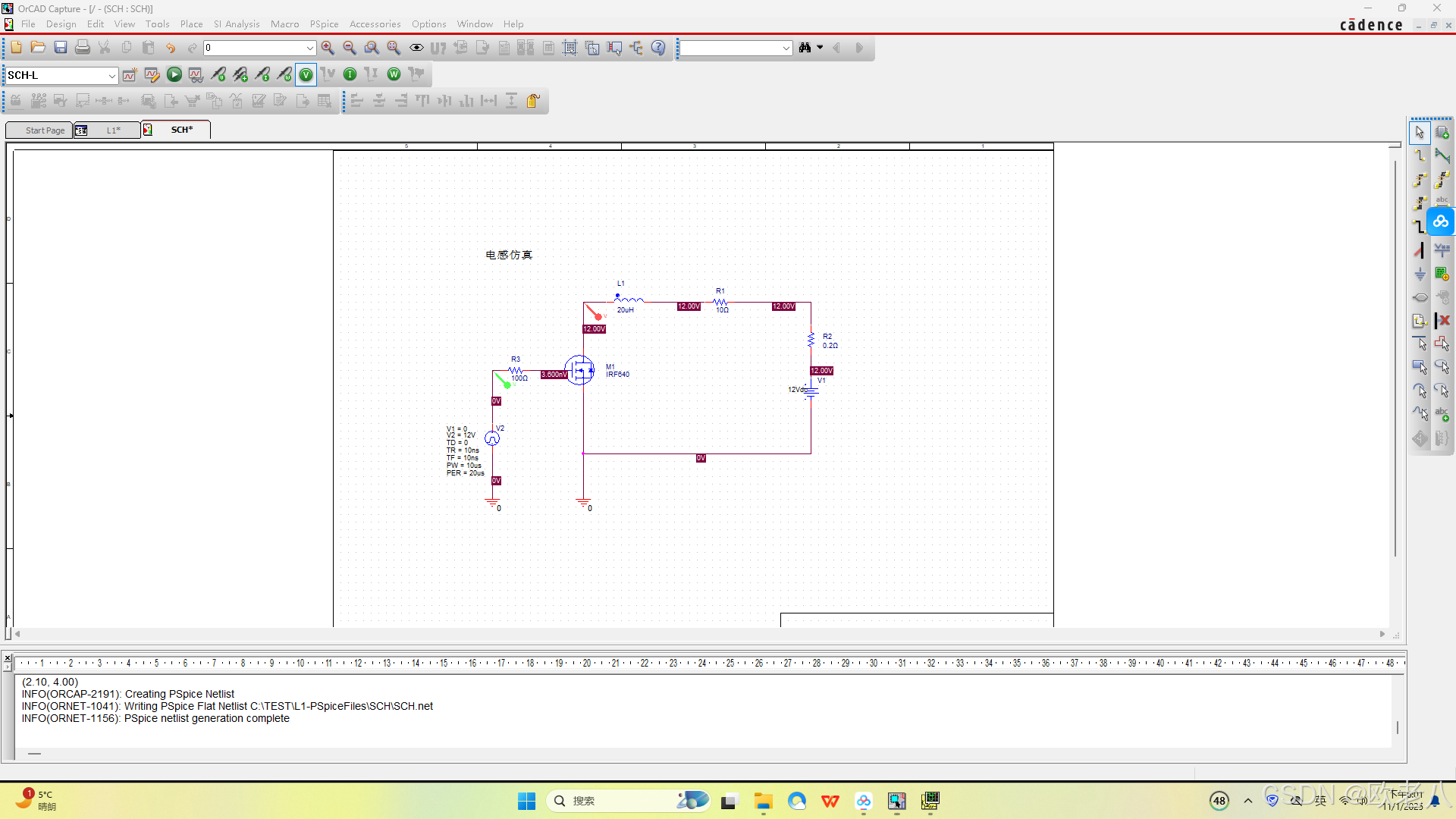
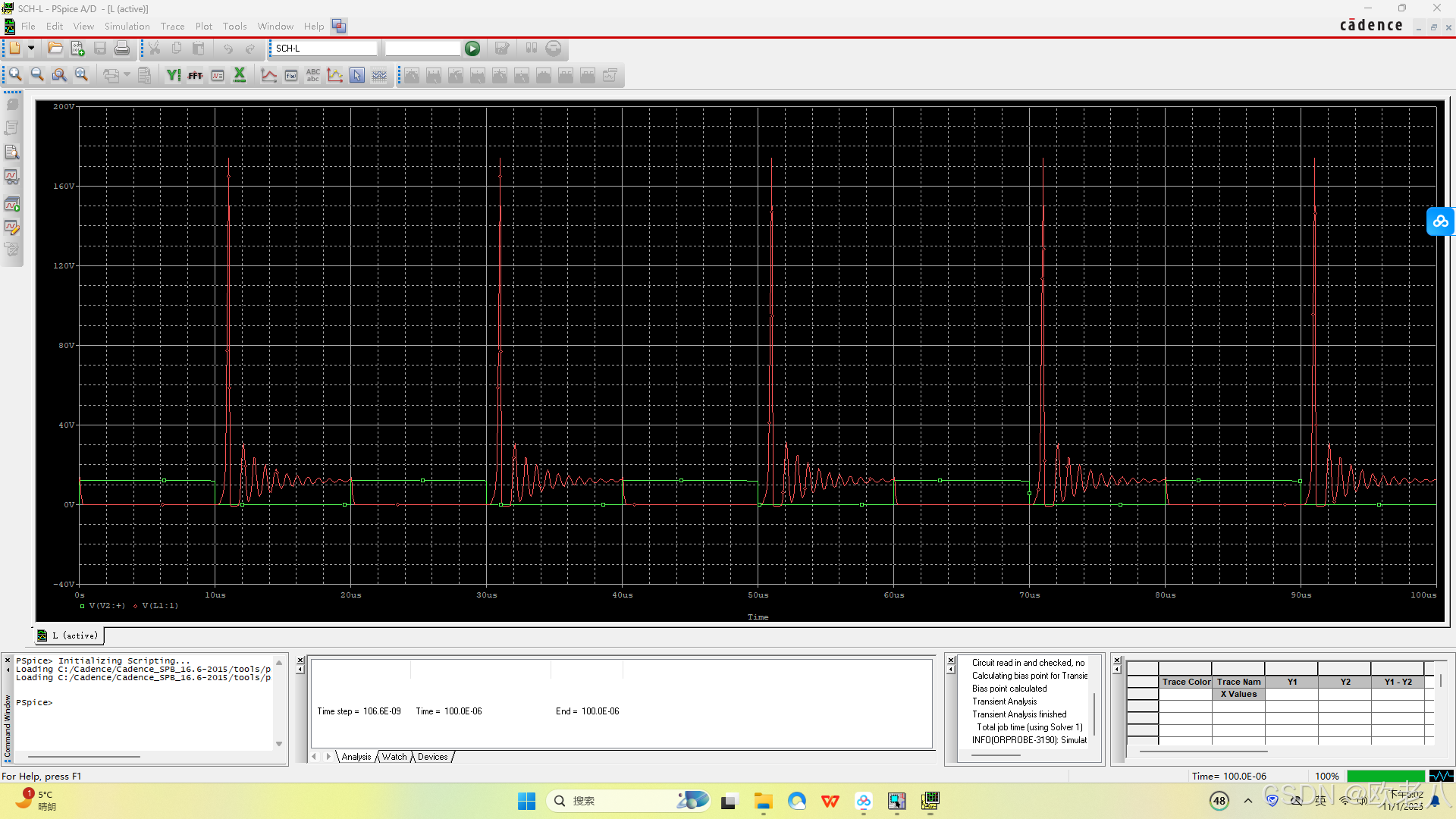
5.更换电感参数,变为20uH,发现电压升的更高
6.加上续流电路,发现电压明显好转
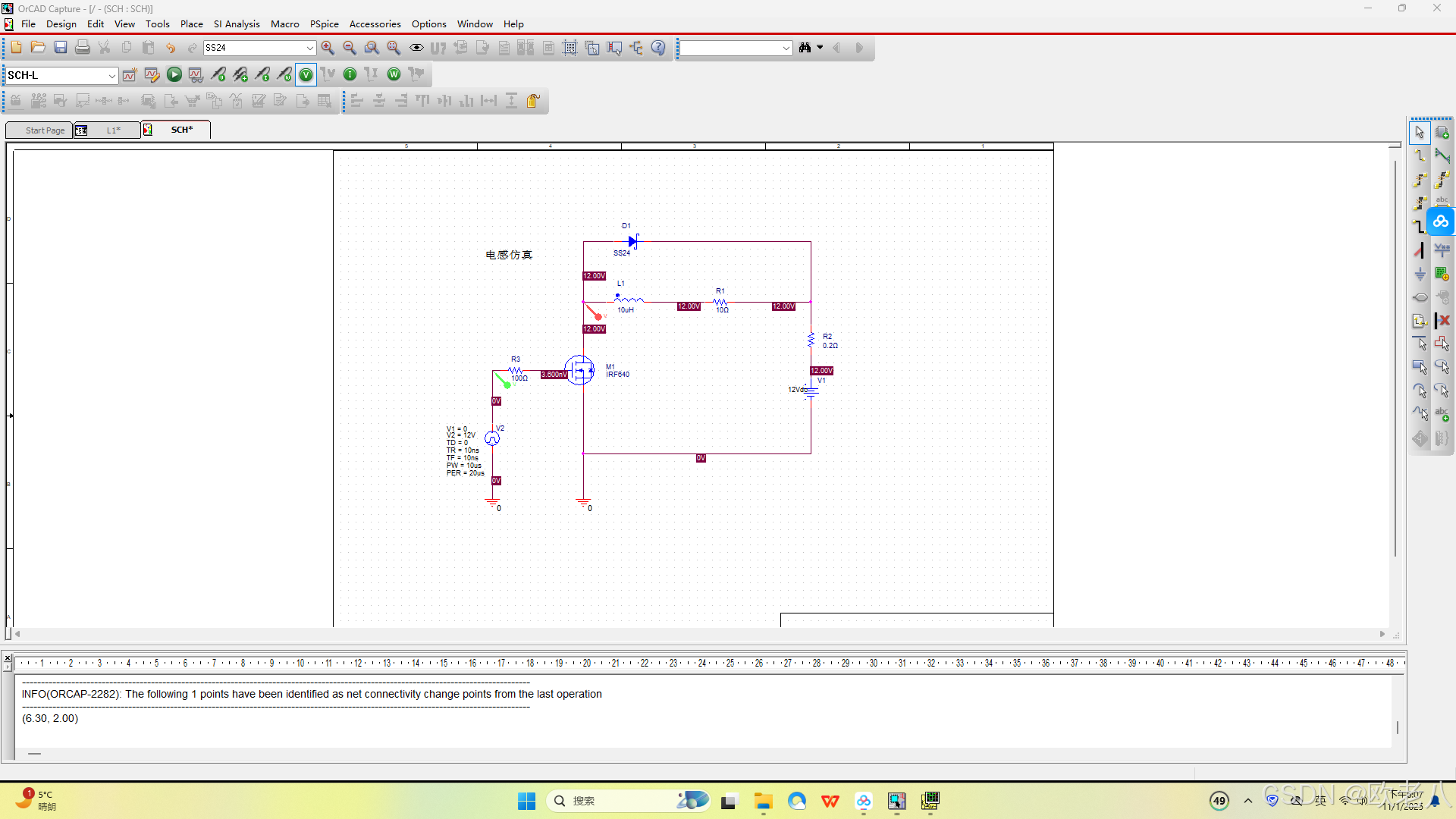
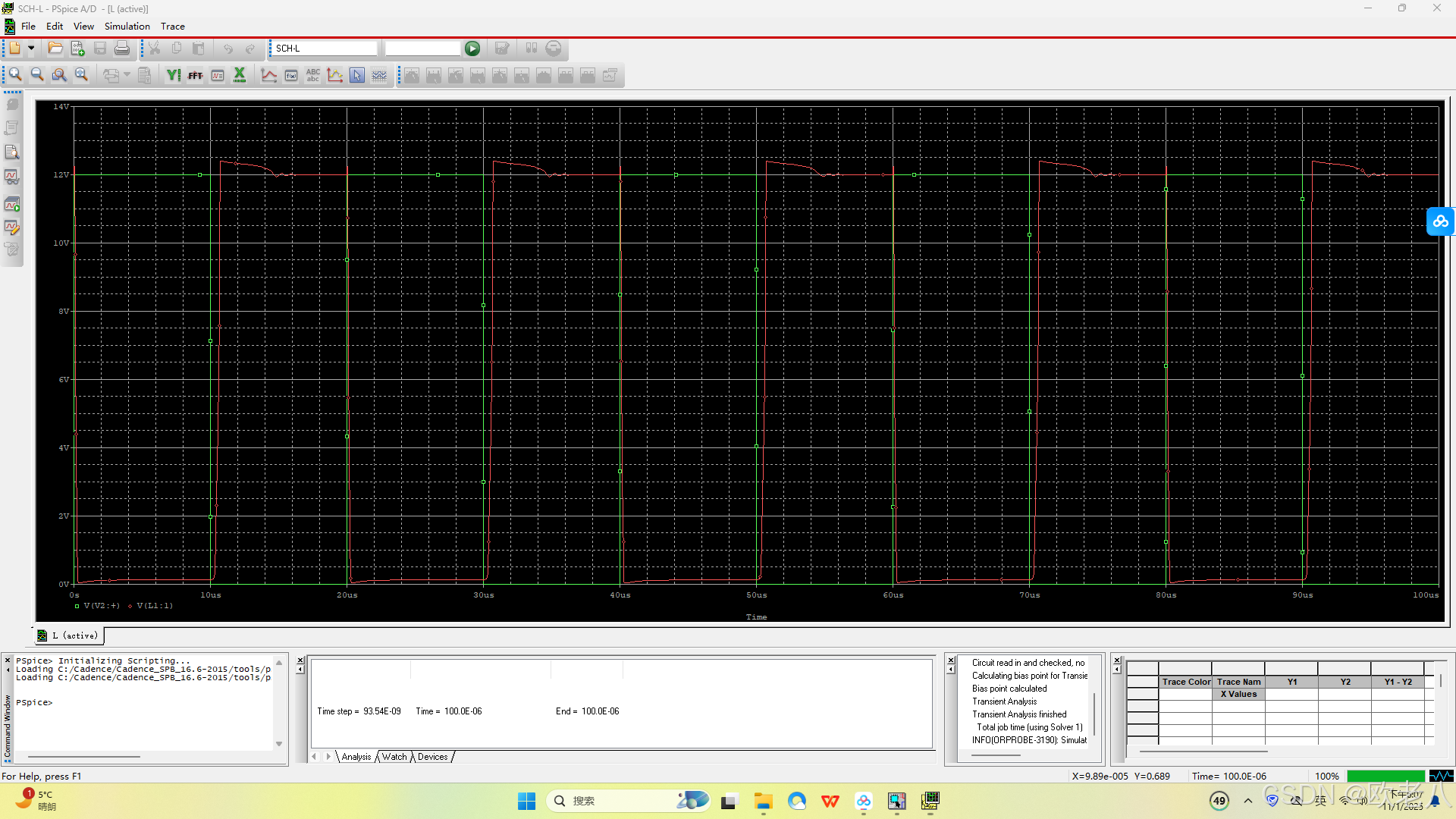
7.更换续流电路,发现电压有下降,因为电路中电阻是固定的,电流在慢慢减小。
1.使用OrCAD软件进行仿真(不能有中文路径)
2.放置元器件(电阻,电感,脉冲),并进行连线,设置相关参数,放置探针
3.进行仿真,看到红色电压明显突然升高
5.更换电感参数,变为20uH,发现电压升的更高
6.加上续流电路,发现电压明显好转
7.更换续流电路,发现电压有下降,因为电路中电阻是固定的,电流在慢慢减小。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1348
1348





