







 本文介绍了电机控制中的扩展反电动势(ElectromotiveForce,EEMF)模型,特别关注SPM和IPM的区别。EEMF模型统一了SPM和IPM的无感控制算法,允许在两种电机类型上计算包含转子位置信息的反电动势,进而实现无位置传感器控制。文章详细推导了EEMF的理论,并通过仿真验证了其在IPM电机上的效果。
本文介绍了电机控制中的扩展反电动势(ElectromotiveForce,EEMF)模型,特别关注SPM和IPM的区别。EEMF模型统一了SPM和IPM的无感控制算法,允许在两种电机类型上计算包含转子位置信息的反电动势,进而实现无位置传感器控制。文章详细推导了EEMF的理论,并通过仿真验证了其在IPM电机上的效果。
电机控制专题(二)——Sensorless之扩展反电动势EEMF
前言
总结下电机控制中的扩展反电动势模型。
纯小白,如有不当,轻喷,还请指出。
在得出EEMF(Extended Electromotive Force)之前,有必要先从一个不具有凸机效应的表贴式永磁同步电机Suface Mounted Permanet Machine(SPM)的模型入手。
SPM在两相静止坐标系下的数学模型可表示为
[
v
α
v
β
]
=
[
R
+
p
L
0
0
R
+
p
L
]
[
i
α
i
β
]
+
ω
r
e
ψ
f
[
−
sin
θ
r
e
cos
θ
r
e
]
\begin{bmatrix}v_\alpha\\v_\beta\end{bmatrix}=\begin{bmatrix}R+pL&0\\0&R+pL\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}+\omega_{re}\psi_f\begin{bmatrix}-\sin\theta_{re}\\\cos\theta_{re}\end{bmatrix}
[vαvβ]=[R+pL00R+pL][iαiβ]+ωreψf[−sinθrecosθre](1)
其中 v α β v_{\alpha\beta} vαβ为 α β \alpha\beta αβ轴电压分量, i α β i_{\alpha\beta} iαβ为 α β \alpha\beta αβ轴电流分量, R , L , ω r e , ψ f R,L,\omega_{re},\psi_f R,L,ωre,ψf分别为电机的电阻、电感、电角速度和永磁体基波磁链幅值, p p p是微分算子。
式(1)说明,通过测量 v α β v_{\alpha\beta} vαβ, i α β i_{\alpha\beta} iαβ,即可算出 α β \alpha\beta αβ轴的反电势,即式(1)等号右边的第二项。而反电势包含有转子位置信息,因此可以通过反正切或者锁相环PLL等算法提取得到电机的电角度和转速,从而实现无位置传感器Sensorless控制。
上述的SPM的基于反电动势的无感控制算法看上去还挺简单的对吧,但当电机是一个具有凸极效应的内置式永磁电机Interior Permanent Machine(IPM)的时候,情况又是怎样的呢?
IPM在两相静止坐标系下的数学模型如下:
[
v
α
v
β
]
=
[
R
+
p
L
α
p
L
α
β
p
L
α
β
R
+
p
L
β
]
[
i
α
i
β
]
+
ω
r
e
ψ
f
[
−
sin
θ
r
e
cos
θ
r
e
]
\begin{bmatrix}v_\alpha\\v_\beta\end{bmatrix}=\begin{bmatrix}R+pL_\alpha&pL_{\alpha\beta}\\pL_{\alpha\beta}&R+pL_\beta\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}+\omega_{re}\psi_f\begin{bmatrix}-\sin\theta_{re}\\\cos\theta_{re}\end{bmatrix}
[vαvβ]=[R+pLαpLαβpLαβR+pLβ][iαiβ]+ωreψf[−sinθrecosθre](2)
L
α
=
L
0
+
L
1
cos
2
θ
r
e
L
β
=
L
0
−
L
1
cos
2
θ
r
e
L
α
β
=
L
1
sin
2
θ
r
e
L
0
=
(
L
d
+
L
q
)
2
L
1
=
(
L
d
−
L
q
)
2
.
\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\begin{aligned} L_{\alpha}=& L_0+L_1\cos2\theta_{re} \\ L_{\beta}=& L_0-L_1\cos2\theta_{re} \\ L_{\alpha\beta}=& L_1\sin2\theta_{re} \\ L_0=& \begin{aligned}\frac{(L_d+L_q)}{2}\end{aligned} \\ L_{1}=& \begin{aligned}\frac{(L_d-L_q)}{2}.\end{aligned} \end{aligned}
Lα=Lβ=Lαβ=L0=L1=L0+L1cos2θreL0−L1cos2θreL1sin2θre2(Ld+Lq)2(Ld−Lq).
其中
L
d
,
L
q
L_d,L_q
Ld,Lq为dq轴电感,
θ
r
e
\theta_{re}
θre是电角度。
式(2)说明,当电机是一个IPM时,转子位置信息不仅位于反电动势中,还耦合在电感矩阵中,但由于转子位置位置,因此电感矩阵也是未知的,不能算出正确的反电动势。
到这里读者应该可以发现了,同样都出于计算电机反电动势来实现无感控制的目的,但却只适用于SPM,那未免也太鸡肋了。所以EEMF概念的提出就是为了将SPM和IPM的基于反电动势无感算法统一起来,在这个EEMF模型下,对SPM和IPM都适用,是一个通用的交流电机无感控制算法。
理论推导
IPM在dq坐标系下的数学模型为
[
v
d
v
q
]
=
[
R
+
p
L
d
−
ω
r
e
L
q
ω
r
e
L
d
R
+
p
L
q
]
[
i
d
i
q
]
+
[
0
ω
r
e
ψ
f
]
\begin{bmatrix}v_d\\v_q\end{bmatrix}=\begin{bmatrix}R+pL_d&-\omega_{re}L_q\\\omega_{re}L_d&R+pL_q\end{bmatrix}\begin{bmatrix}i_d\\i_q\end{bmatrix}+\begin{bmatrix}0\\\omega_{re}\psi_f\end{bmatrix}
[vdvq]=[R+pLdωreLd−ωreLqR+pLq][idiq]+[0ωreψf](3)
重写式(3)中的电感矩阵和旋转反电势项,得到
[
v
α
v
β
]
=
[
R
+
p
L
d
ω
r
e
(
L
d
−
L
q
)
−
ω
r
e
(
L
d
−
L
q
)
R
+
p
L
d
]
[
i
α
i
β
]
+
{
(
L
d
−
L
q
)
(
ω
r
e
i
d
−
i
q
)
+
ω
r
e
ψ
f
}
[
−
sin
θ
r
e
cos
θ
r
e
]
\begin{bmatrix}v_\alpha\\v_\beta\end{bmatrix}=\begin{bmatrix}R+pL_d&\omega_{re}(L_d-L_q)\\-\omega_{re}(L_d-L_q)&R+pL_d\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}\\+\big\{(L_d-L_q)(\omega_{re}i_d-i_q)+\omega_{re}\psi_f\big\}\left[\begin{array}{c}-\sin\theta_{re}\\\cos\theta_{re}\end{array}\right]
[vαvβ]=[R+pLd−ωre(Ld−Lq)ωre(Ld−Lq)R+pLd][iαiβ]+{(Ld−Lq)(ωreid−iq)+ωreψf}[−sinθrecosθre](4)
对式(4)进行反Park变化,得到两相静止坐标系下的数学模型
[
v
α
v
β
]
=
[
R
+
p
L
d
ω
r
e
(
L
d
−
L
q
)
−
ω
r
e
(
L
d
−
L
q
)
R
+
p
L
d
]
[
i
α
i
β
]
+
{
(
L
d
−
L
q
)
(
ω
r
e
i
d
−
i
˙
q
)
+
ω
r
e
ψ
f
}
[
−
sin
θ
r
e
cos
θ
r
e
]
\begin{bmatrix}v_\alpha\\v_\beta\end{bmatrix}=\begin{bmatrix}R+pL_d&\omega_{re}(L_d-L_q)\\-\omega_{re}(L_d-L_q)&R+pL_d\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}\\+\{(L_d-L_q)(\omega_{re}i_d-\dot{i}_q)+\omega_{re}\psi_f\}\begin{bmatrix}-\sin\theta_{re}\\\cos\theta_{re}\end{bmatrix}
[vαvβ]=[R+pLd−ωre(Ld−Lq)ωre(Ld−Lq)R+pLd][iαiβ]+{(Ld−Lq)(ωreid−i˙q)+ωreψf}[−sinθrecosθre](5)
其中等式右侧的第二项即为扩展反电动势EEMF,可以看出,当
L
d
=
L
q
L_d=L_q
Ld=Lq,EEMF即SPM的反电动势,因此EEMF是交流电机反电动势的统一的表达式。
式(5)表明,经过等价变化以后,电感矩阵不在包含于转子位置信息,转子位置只包含在EEMF中。但代价是对角元出现了与转速相关的反电动势项,仍然也是未知的。但相较于式(2),包含未知项的只有非对角元素了,本质上对模型也是有一定程度的简化。
因此通过式(5)计算得到EEMF,并设计合理的观测器PLL,估算电机的转速和角度,再反馈到式(5)中电感矩阵的非对角元素,即可使得最终估算的转速和角度收敛到真实值。
仿真验证
基于上述的EEMF模型,对一台IPM电机进行无感控制,相应的仿真参数设置如下
| 参数 | 值 |
|---|---|
| L d L_d Ld | 1.2mH |
| L q L_q Lq | 2.4mH |
| ψ f \psi_f ψf | 0.14Wb |
| U d c U_{dc} Udc | 200V |
由于反电动势与转速成正比,低转速情况下的反电动势,计算得到的反电动势误差较大,因此需要将电机开环拖动至较高转速,至转速及角度收敛以后再切入转速闭环。
设置电机空载启动0.12s后,切入闭环控制,控制转速为2000rpm,0.2s加载至5N·m,0.3s加速至3000rpm,仿真总时长0.4s。相应的仿真结果如下图所示。

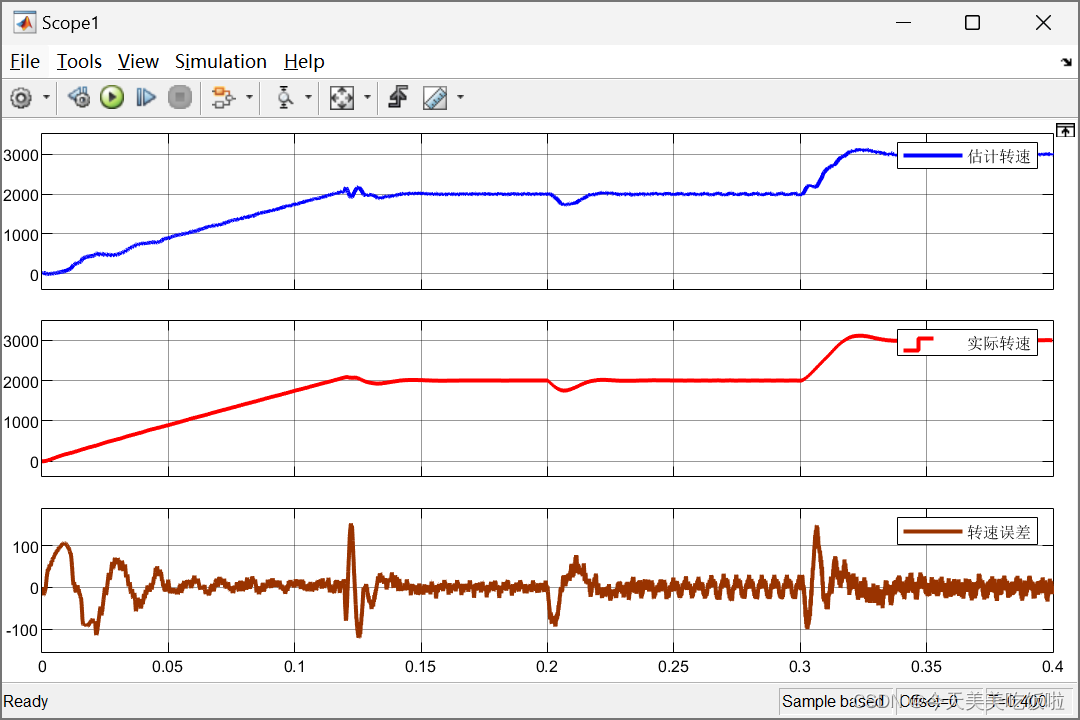
仿真结果表明,应用EEMF能够对一台IPM实现转子速度及位置的估算。
总结
EEMF是IPM,以及SPM的反电动势的统一模型。不论是IPM还是SPM,都可以计算出含转子位置信息的EEMF,从而结合观测器提取转子转速以及转子角,实现无位置控制。
参考文献
[1] Chen Z, Tomita M, Doki S, et al. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors[J/OL]. IEEE Transactions on Industrial Electronics, 2003, 50(2): 288-295.


















 1111
1111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











