







机械手控制分几部分来完成;
1.1外部硬件接口:
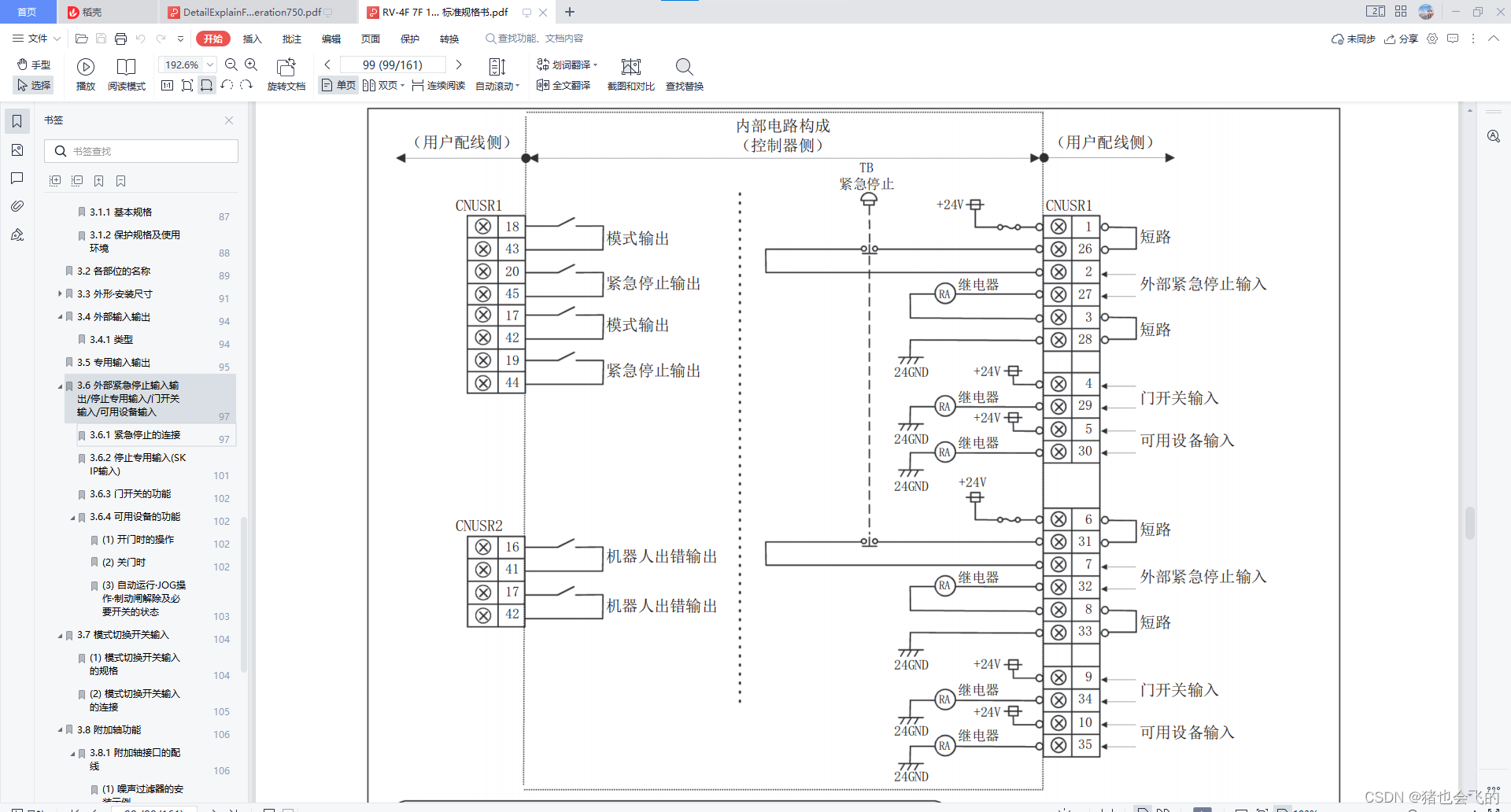
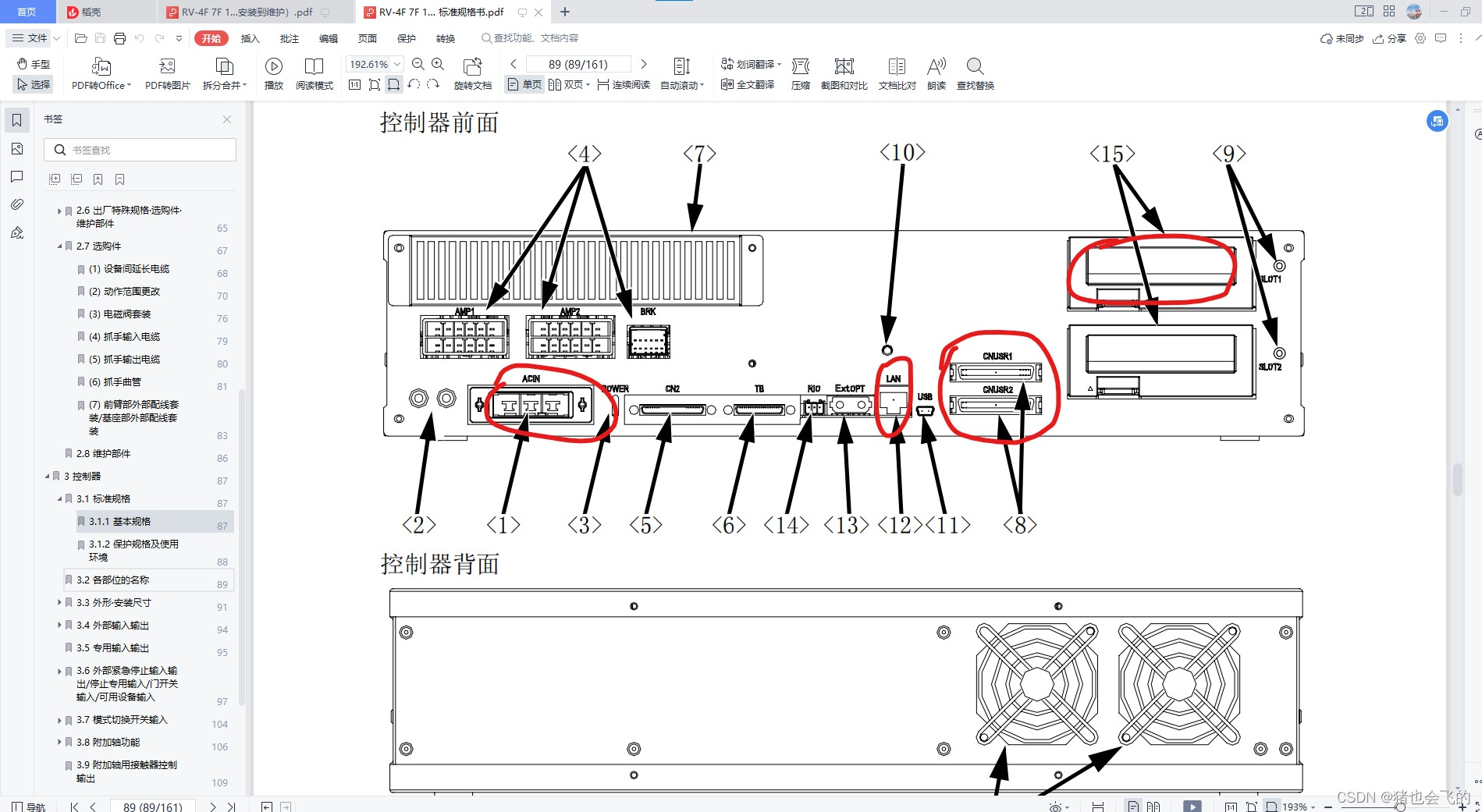
CNUSR1 与2 : 这两个为指定接口(急停、安全门与其他特殊功能等),没有用到一些通用接口的分配;
1.2
使用IO 控制需要加模块; (模块分几种一个是RIO 接口. 另一种是SLOT1 / 2 这个可以接通讯模块和IO模块,通讯模块的地址从2000开始。最大4048 ;)
2.变量定义
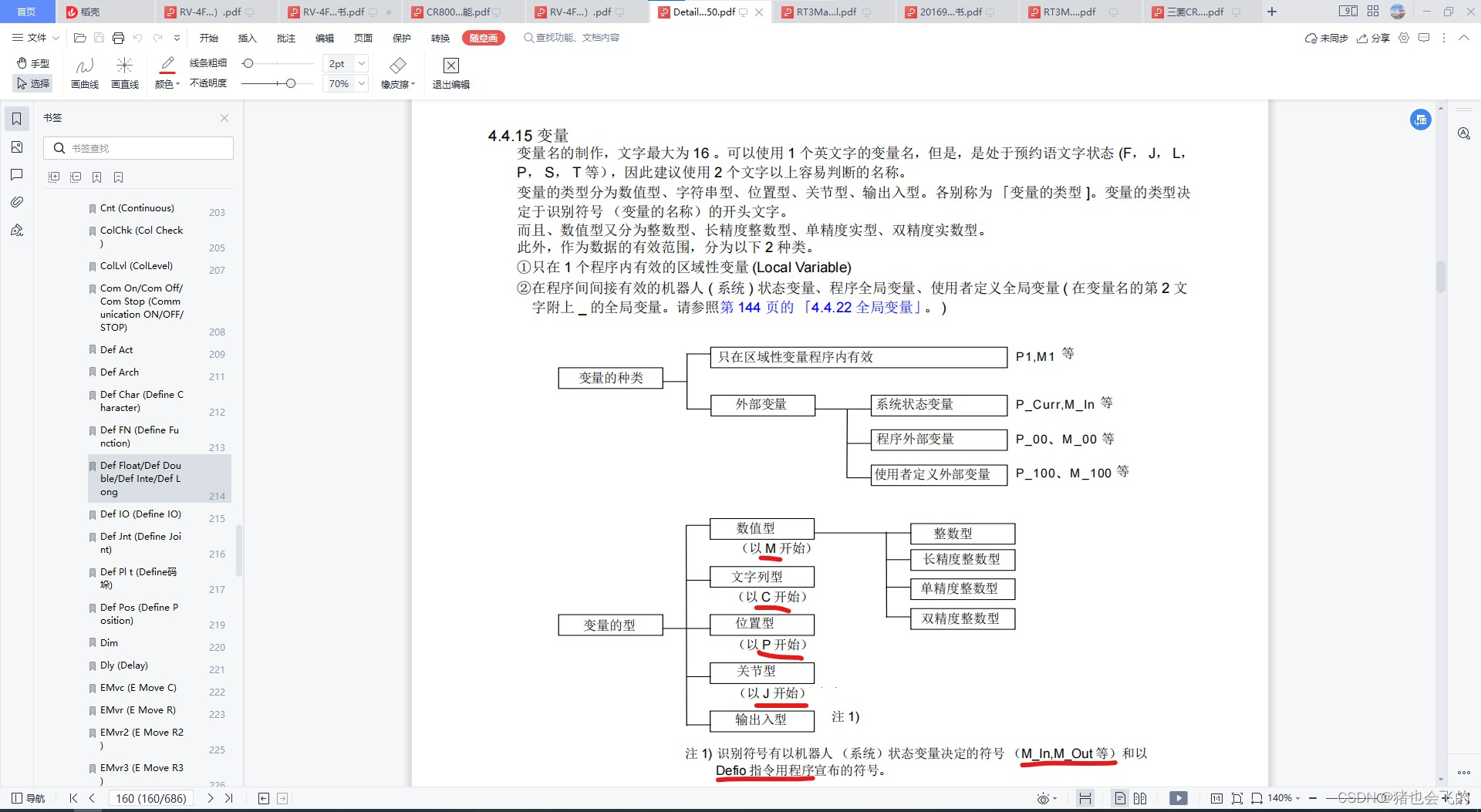
变量定义也非常特殊 ,机械手的变量定义的方式第一种为全局用户自定义; 第二种为按系统规范定义; 第三种系统自带变量;
机械手控制分几部分来完成;
1.1外部硬件接口:
CNUSR1 与2 : 这两个为指定接口(急停、安全门与其他特殊功能等),没有用到一些通用接口的分配;
1.2
使用IO 控制需要加模块; (模块分几种一个是RIO 接口. 另一种是SLOT1 / 2 这个可以接通讯模块和IO模块,通讯模块的地址从2000开始。最大4048 ;)
2.变量定义
变量定义也非常特殊 ,机械手的变量定义的方式第一种为全局用户自定义; 第二种为按系统规范定义; 第三种系统自带变量;
 1万+
422
1万+
422

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























