










打开Matlab/Simulink,新建一个空的模型,按ctrl+E,打开系统配置参数
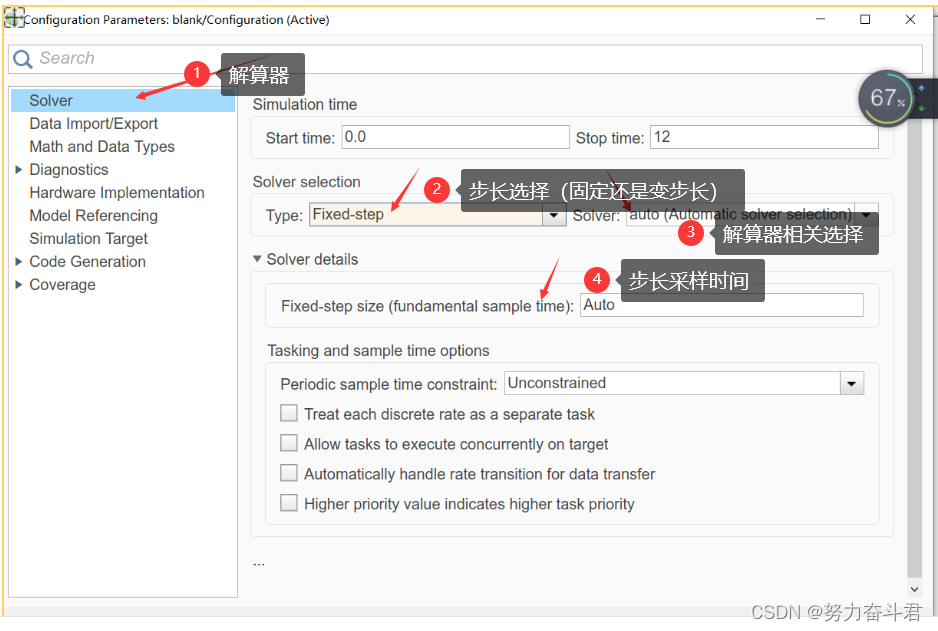
先看变步长解算器及其算法
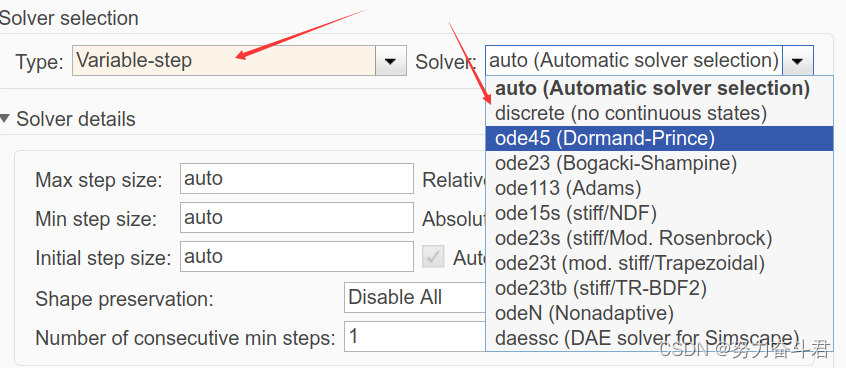
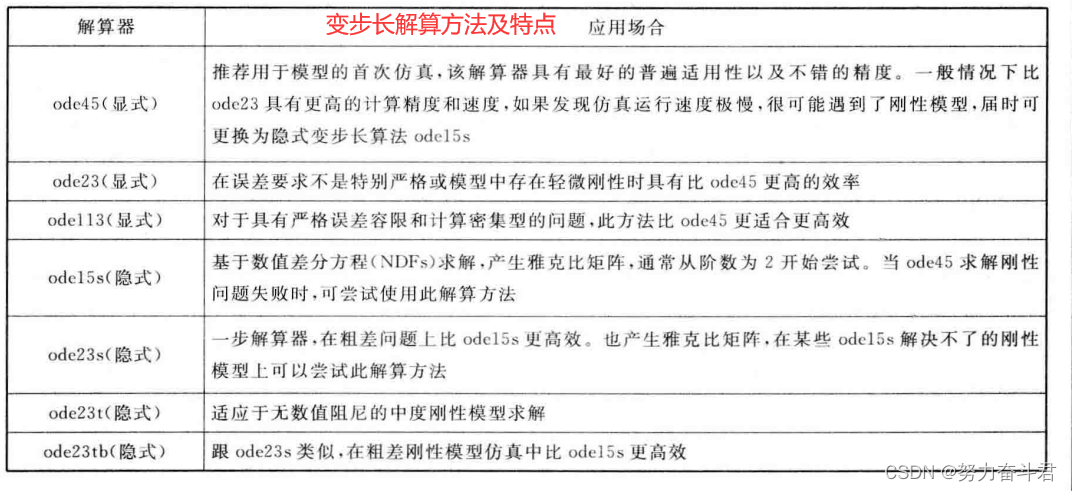
变步长解算方法在仿真过程中自动检测局部误差以增大或减小步长来满足用户设定的误差容限。变步长下默认为ode45解算器。变步长解算器库中提供的各种解算方法的应用场合如表所列。
固定步长解算器及其算法
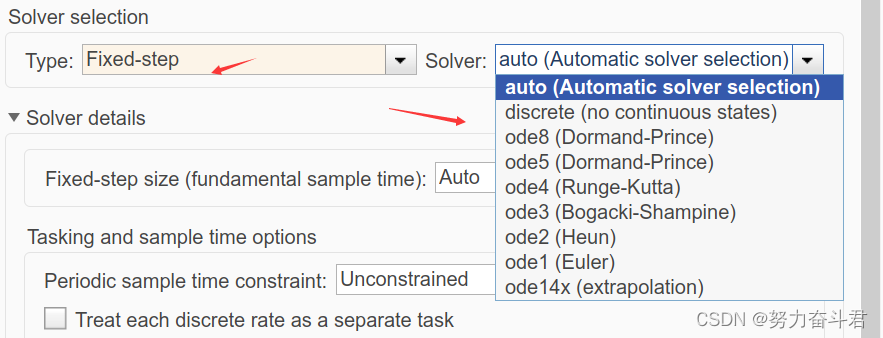
对于固定步长解算方法而言,没有误差控制,所以其计算精度完全靠步长大小来决定。步长越小,计算精度越高﹐花费的时间也越长。Simulink 提供的算法从1阶欧拉算法到8阶Dormand-Prince算法,在积分计算的复杂度上有区别, Type选择Fixed-step 时,默认选择ode3解算方法。对于同样的步长,积分计算越复杂的解算器求解精度越高,但是解算速度相对慢。读者需要在精度与速度之间做一个权衡。
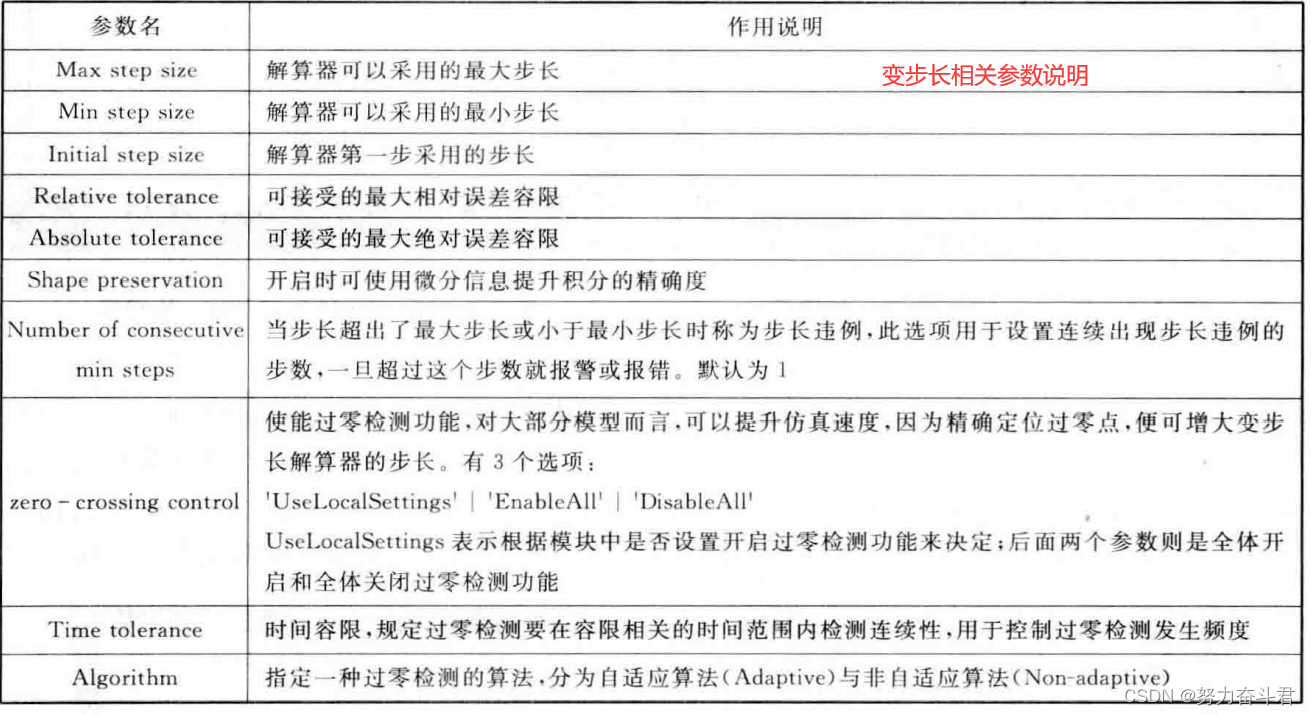
变步长solver details 的一些相关说明



















 1135
1135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











