



实验一: IMU 数据进行轨迹的推算
实验代码
ch3/imu_integration.h
实现了一个 IMU(惯性测量单元)积分功能,用于根据 IMU 数据更新载体(比如无人机、小车 )的位置 p、速度 v和姿态 R
#ifndef SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
#define SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
#include "common/eigen_types.h"
#include "common/imu.h"
#include "common/nav_state.h"
namespace sad {
// IMU积分器类,封装状态和操作,方便模块化使用
class IMUIntegration {
public:
IMUIntegration(const Vec3d& gravity, const Vec3d& init_bg, const Vec3d& init_ba)
: gravity_(gravity), bg_(init_bg), ba_(init_ba) {}
// 处理 IMU 数据并更新状态
void AddIMU(const IMU& imu) {
double dt = imu.timestamp_ - timestamp_;
if (dt > 0 && dt < 0.1) {
// 假设IMU时间间隔在0至0.1以内
p_ = p_ + v_ * dt + 0.5 * gravity_ * dt * dt + 0.5 * (R_ * (imu.acce_ - ba_)) * dt * dt;
v_ = v_ + R_ * (imu.acce_ - ba_) * dt + gravity_ * dt;
R_ = R_ * Sophus::SO3d::exp((imu.gyro_ - bg_) * dt);
}
// 更新时间
timestamp_ = imu.timestamp_;
}
/// 状态获取接口
NavStated GetNavState() const { return NavStated(timestamp_, R_, p_, v_, bg_, ba_); }
SO3 GetR() const { return R_; }
Vec3d GetV() const { return v_; }
Vec3d GetP() const { return p_; }
private:
// 累计量
SO3 R_;
Vec3d v_ = Vec3d::Zero();
Vec3d p_ = Vec3d::Zero();
double timestamp_ = 0.0;
// 零偏,由外部设定
Vec3d bg_ = Vec3d::Zero();
Vec3d ba_ = Vec3d::Zero();
Vec3d gravity_ = Vec3d(0, 0, -9.8); // 重力
};
} // namespace sad
#endif // SLAM_IN_AUTO_DRIVING_IMU_INTEGRATION_H
ch3/run_imu_integration.cc
IMU 数据积分程序的主函数,功能是读取 IMU 传感器数据,通过积分计算出载体(如小车、无人机)的位置、速度和姿态,并可实时可视化运动状态,同时将结果保存到文件中。
#include <glog/logging.h>
#include <iomanip>
#include "ch3/imu_integration.h"
#include "common/io_utils.h"
#include "tools/ui/pangolin_window.h"
// 定义命令行参数:IMU数据文件路径,默认值为"./data/ch3/10.txt"
DEFINE_string(imu_txt_path, "./data/ch3/10.txt", "数据文件路径");
// 定义命令行参数:是否显示图形界面,默认值为true
DEFINE_bool(with_ui, true, "是否显示图形界面");
/// 本程序演示如何对IMU进行直接积分
/// 该程序需要输入data/ch3/下的文本文件,同时它将状态输出到data/ch3/state.txt中,在UI中也可以观察到车辆运动
int main(int argc, char** argv) {
google::InitGoogleLogging(argv[0]); // 初始化Google日志库
FLAGS_stderrthreshold = google::INFO; // 设置日志输出级别为INFO及以上
FLAGS_colorlogtostderr = true; // 日志输出到控制台时带颜色
google::ParseCommandLineFlags(&argc, &argv, true); // 解析命令行参数(更新上面定义的FLAGS_xxx)
if (FLAGS_imu_txt_path.empty()) { // 检查IMU数据文件路径是否为空
return -1; // 路径为空则退出程序,返回错误码
}
sad::TxtIO io(FLAGS_imu_txt_path); // 创建TxtIO对象,用于读取指定路径的IMU文本数据
// 该实验中,我们假设零偏已知
Vec3d gravity(0, 0, -9.8); // 重力方向
Vec3d init_bg(00.000224886, -7.61038e-05, -0.000742259);
Vec3d init_ba(-0.165205, 0.0926887, 0.0058049);
sad::IMUIntegration imu_integ(gravity, init_bg, init_ba);
std::shared_ptr<sad::ui::PangolinWindow> ui = nullptr; // 声明可视化窗口智能指针
if (FLAGS_with_ui) { // 如果命令行参数指定显示界面
ui = std::make_shared<sad::ui::PangolinWindow>(); // 创建可视化窗口对象
ui->Init(); // 初始化窗口(如设置窗口大小、坐标系等)
}
/// 记录结果
auto save_result = [](std::ofstream& fout, double timestamp, const Sophus::SO3d& R, const Vec3d& v,
const Vec3d& p) {
auto save_vec3 = [](std::ofstream& fout, const Vec3d& v) { fout << v[0] << " " << v[1] << " " << v[2] << " "; };
auto save_quat = [](std::ofstream& fout, const Quatd& q) {
fout << q.w() << " " << q.x() << " " << q.y() << " " << q.z() << " ";
};
fout << std::setprecision(18) << timestamp << " " << std::setprecision(9);
save_vec3(fout, p); // 保存位置
save_quat(fout, R.unit_quaternion()); // 保存姿态(转换为四元数)
save_vec3(fout, v); // 保存速度
fout << std::endl;
};
std::ofstream fout("./data/ch3/state.txt");
io.SetIMUProcessFunc([&imu_integ, &save_result, &fout, &ui](const sad::IMU& imu) {
imu_integ.AddIMU(imu);
save_result(fout, imu.timestamp_, imu_integ.GetR(), imu_integ.GetV(), imu_integ.GetP());
if (ui) {
ui->UpdateNavState(imu_integ.GetNavState());
usleep(1e2);
}
}).Go();
// 打开了可视化的话,等待界面退出
while (ui && !ui->ShouldQuit()) {
usleep(1e4); // 休眠10毫秒,等待用户关闭可视化窗口
}
if (ui) {
ui->Quit(); // 关闭可视化窗口,释放资源
}
return 0; // 程序正常退出
}
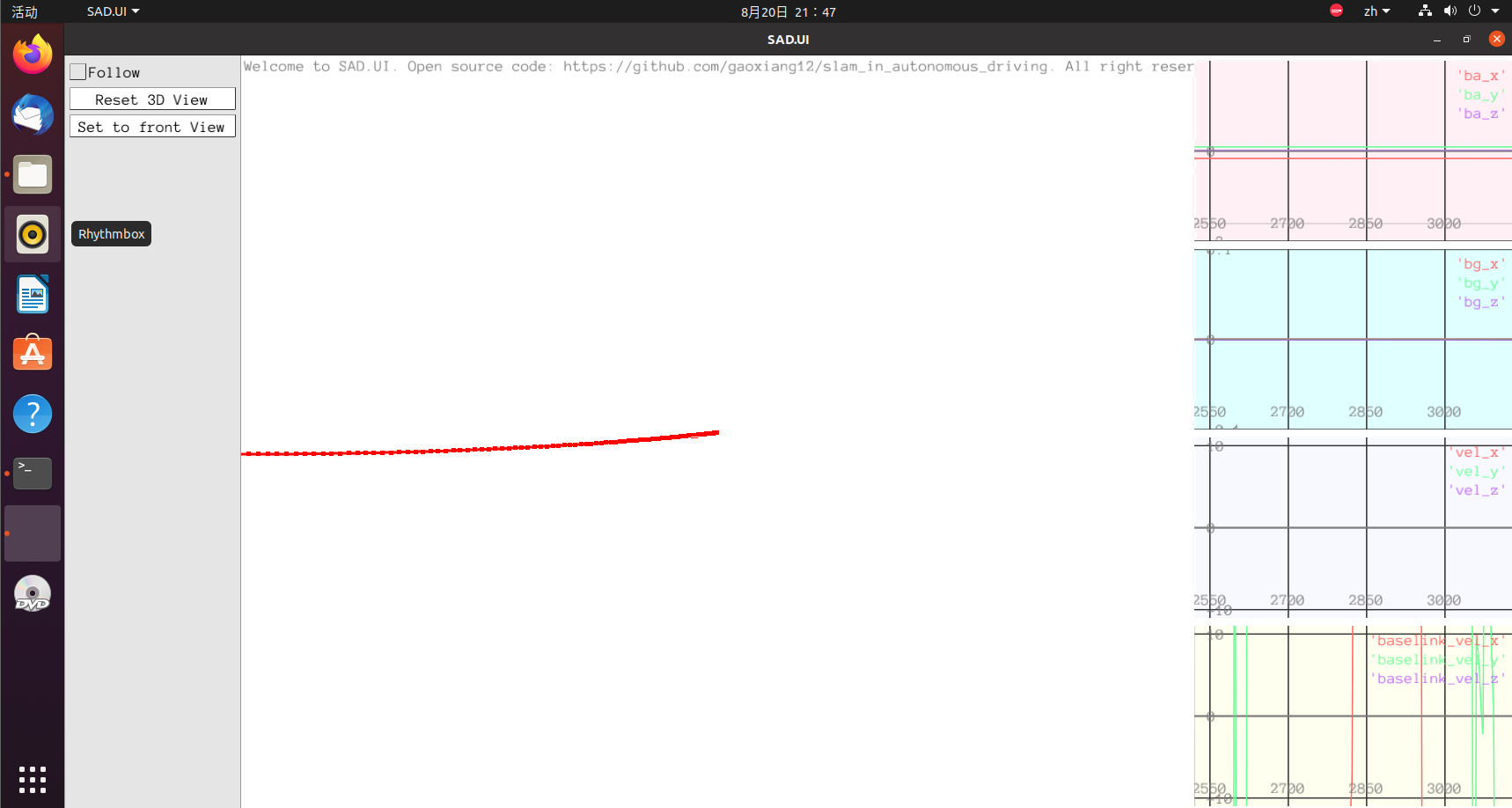
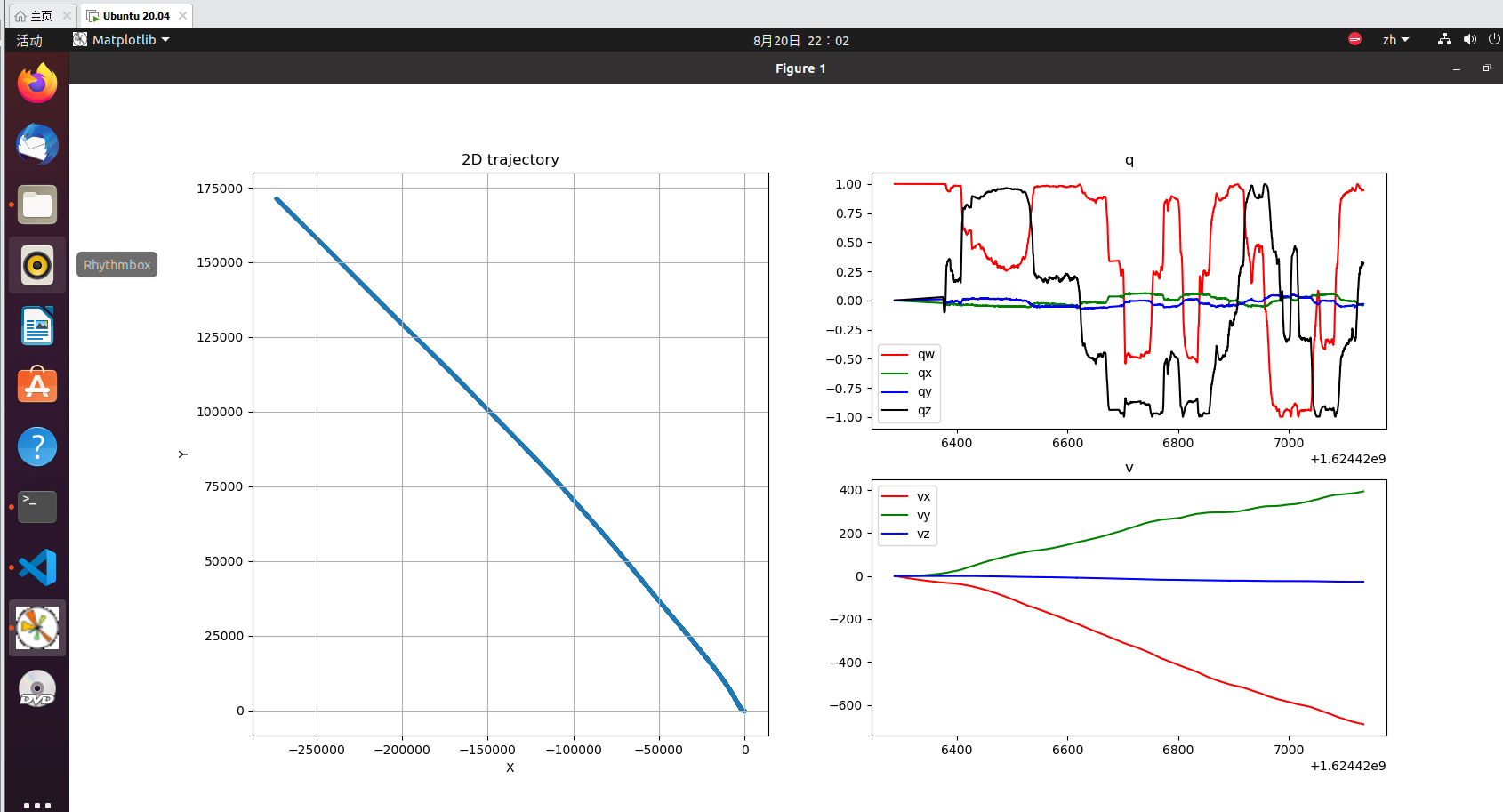
运行结果

















 2069
2069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









