






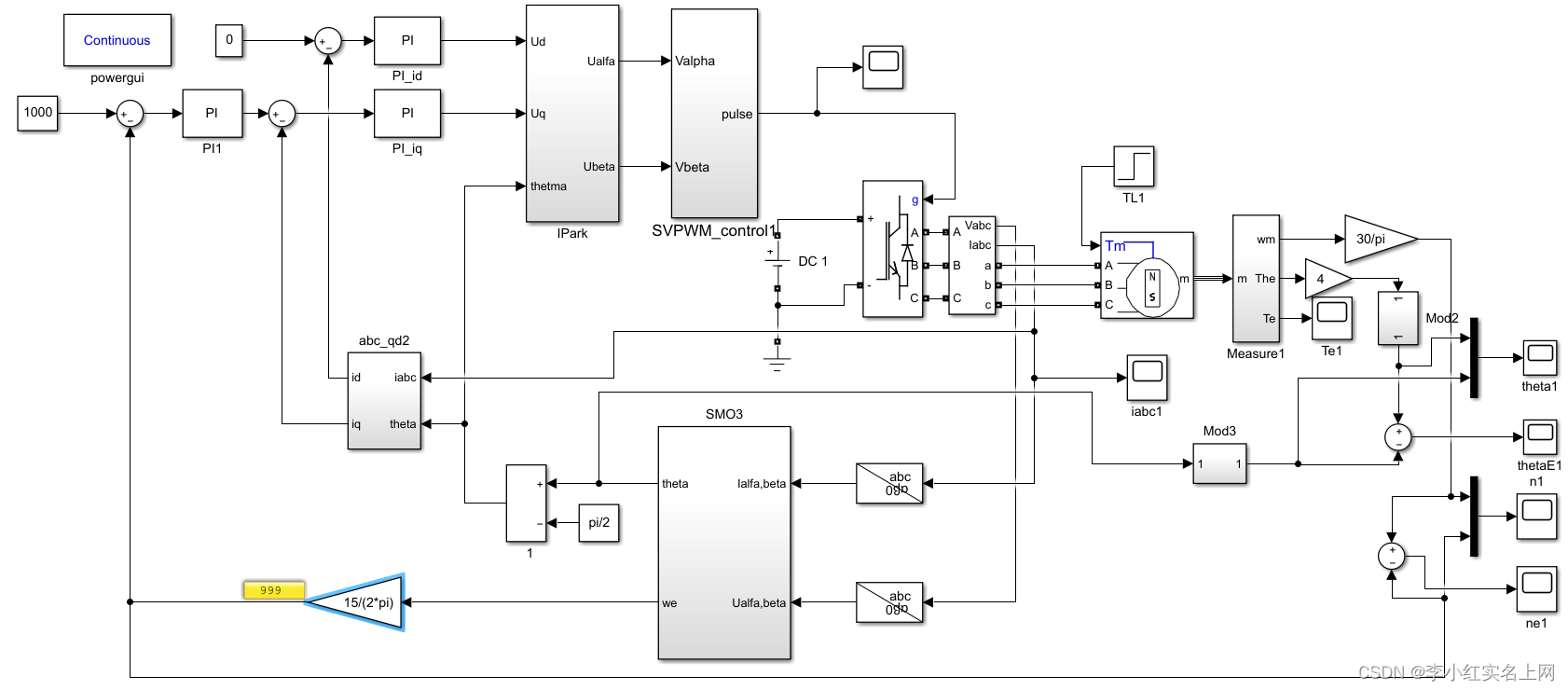
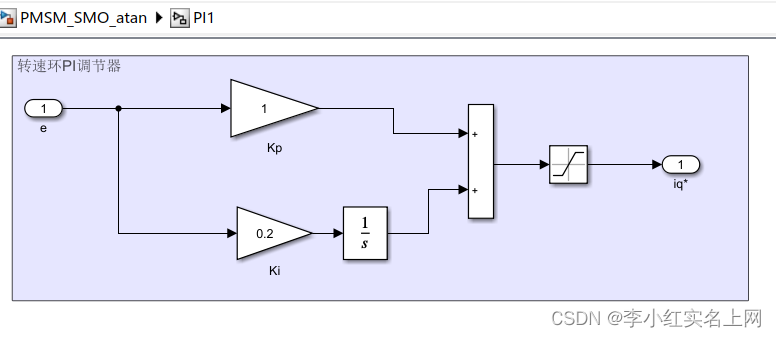
依据袁雷老师的书学习后并搭建的模型
总体模型
反PARK变换
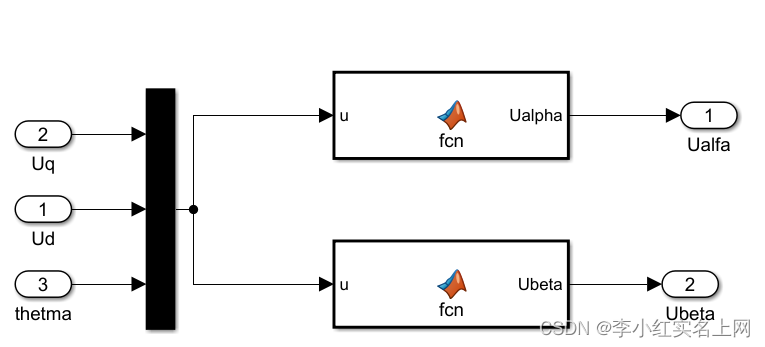
function Ualpha = fcn(u)
Ualpha = cos(u(3))*u(2)-sin(u(3))*u(1);
function Ubeta = fcn(u)
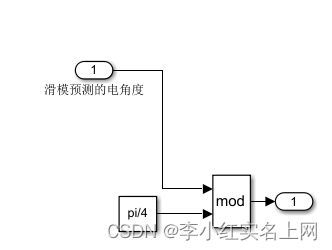
Ubeta =sin(u(3))*u(2)+cos(u(3))*u(1);mod2
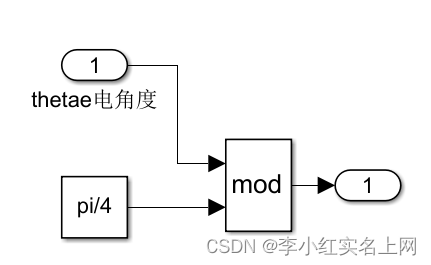
mod4
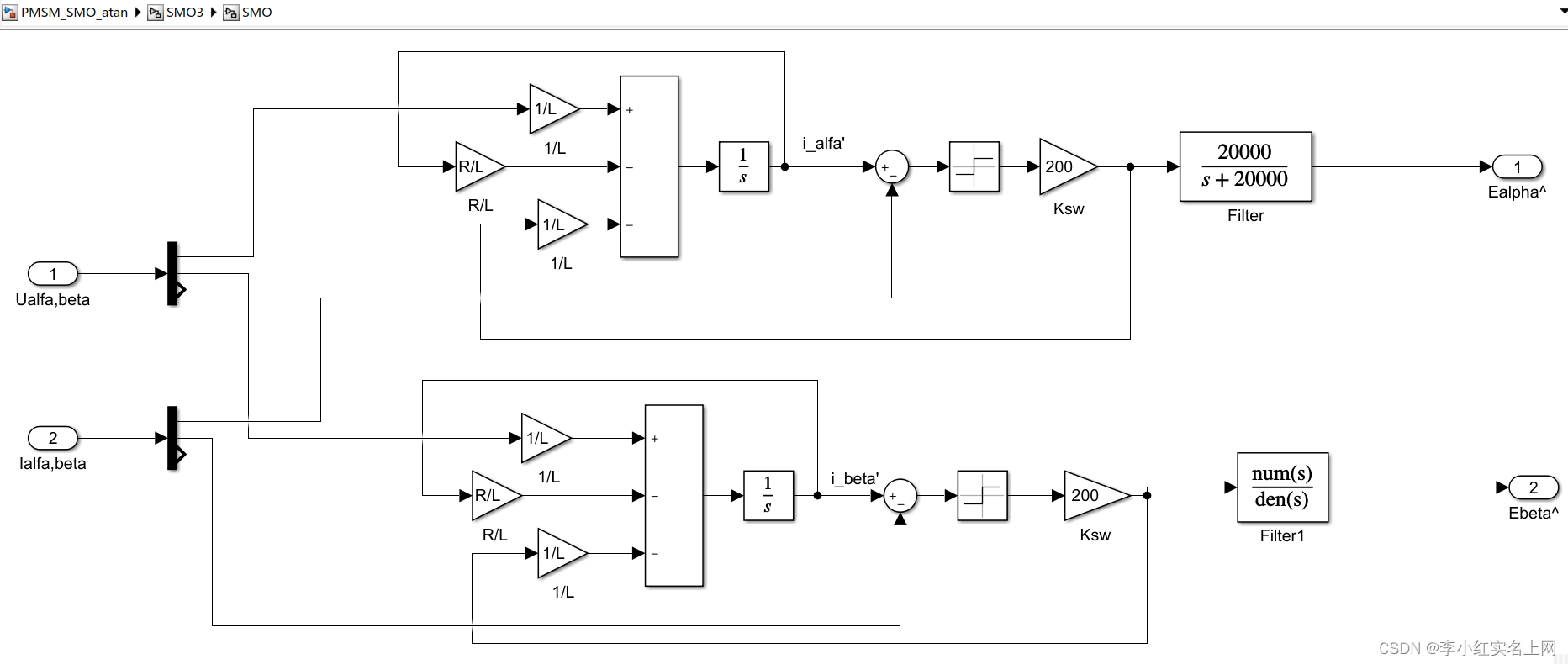
SMO模块
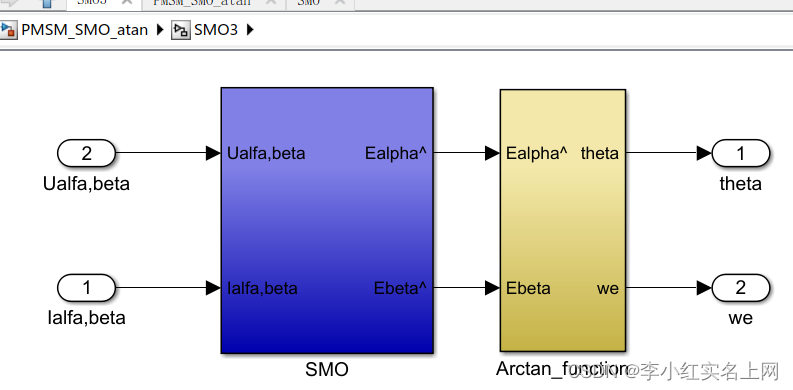
SMO
反正切计算转子位置
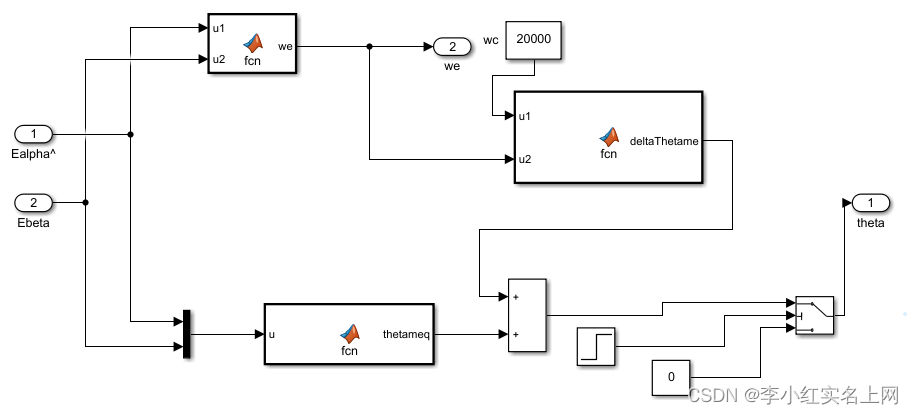
function we = fcn(u1,u2)
%u1=Ualpha^;
%u2=Ubeta
%1/0.175=1/flux
we = sqrt((u1)*(u1)+(u2)*(u2))*(1/0.175);
function thetameq = fcn(u)
thetameq=atan((-u(1))/u(2))+(-u(2)+abs(u(2)))*pi/2/abs(u(2));function deltaThetame= fcn(u1,u2)
%u1=we
%u2=wc
deltaThetame=atan(u1/u2);
三相电->dq
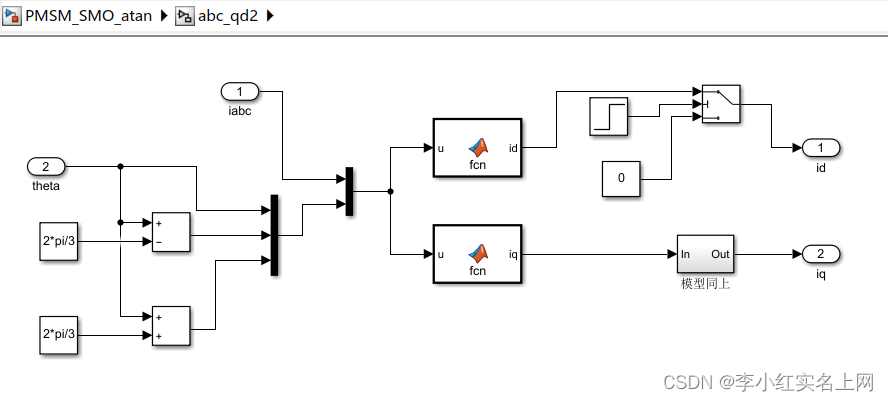
function id = fcn(u)
id = 2*(cos(u(4))*u(1)+cos(u(5))*u(2)+cos(u(6))*u(3))/3;
function iq = fcn(u)
iq =-2*(sin(u(4))*u(1)+sin(u(5))*u(2)+sin(u(6))*u(3))/3;
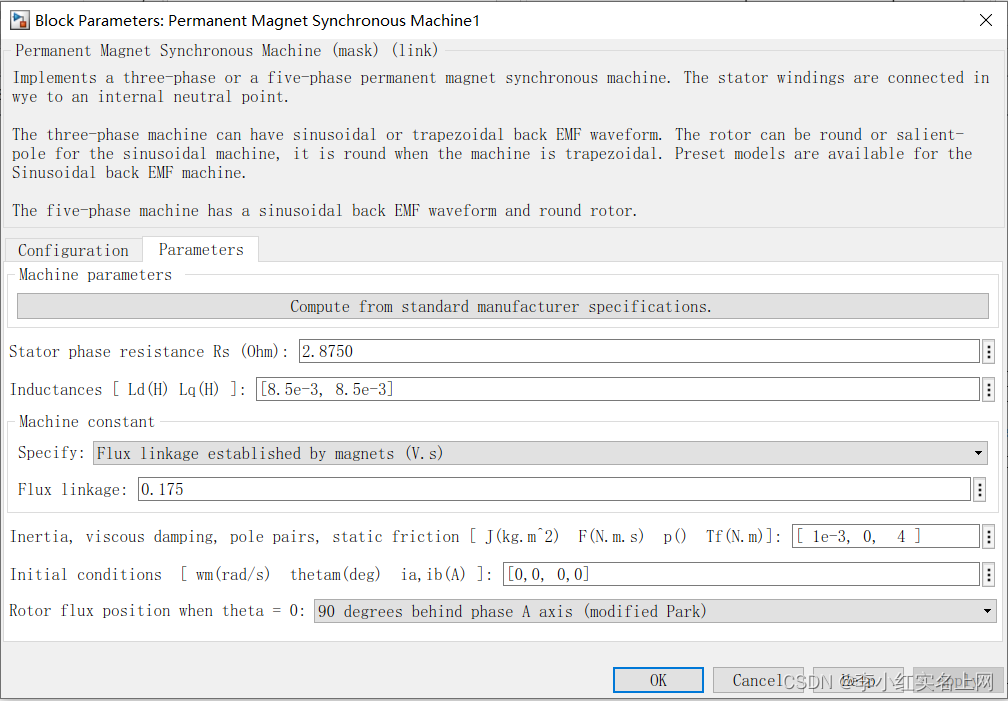
参数设置
电机参数
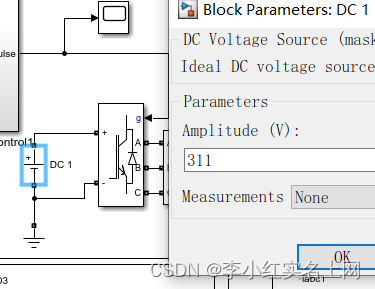
直流电压源
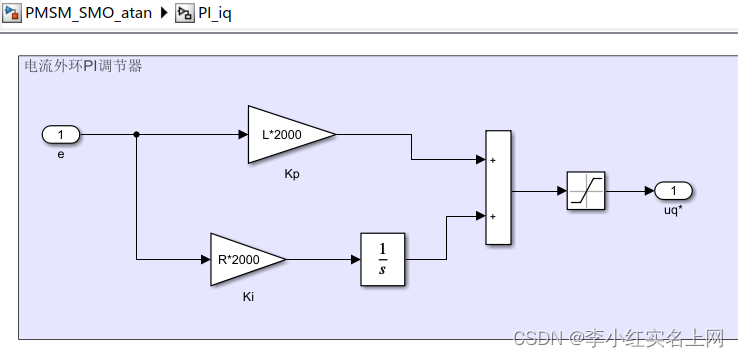
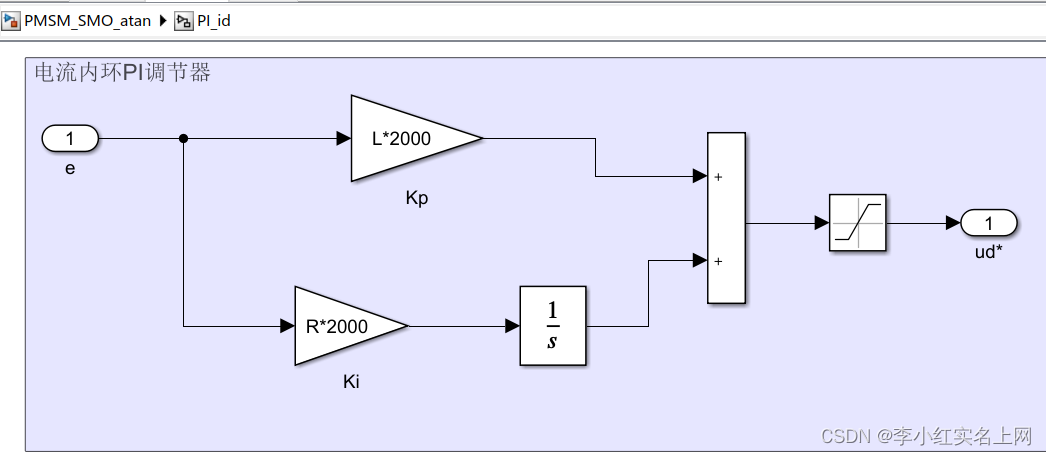
R = 2.8750;
L = 8.5e-3;
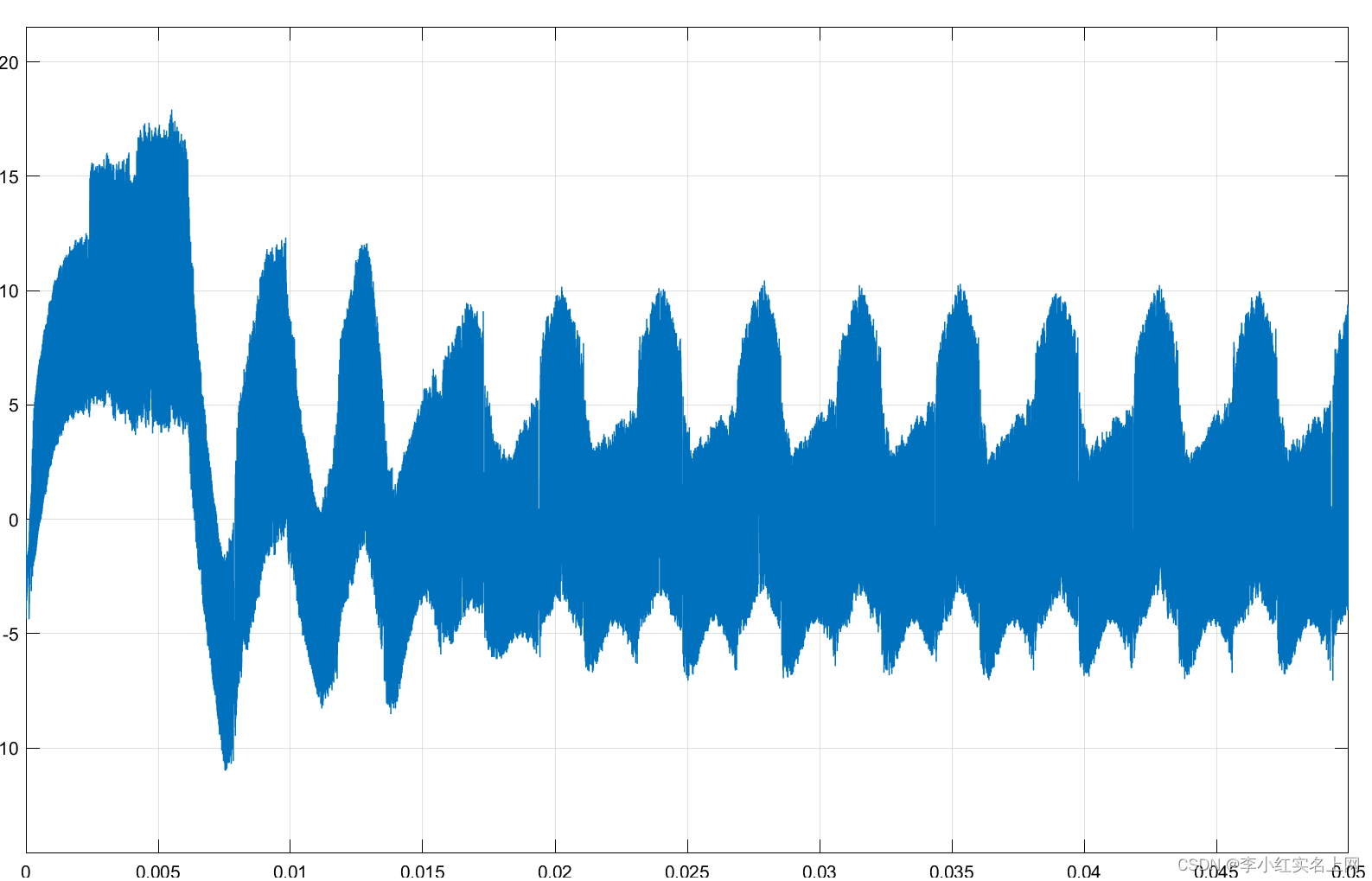
空载情况下图像如图
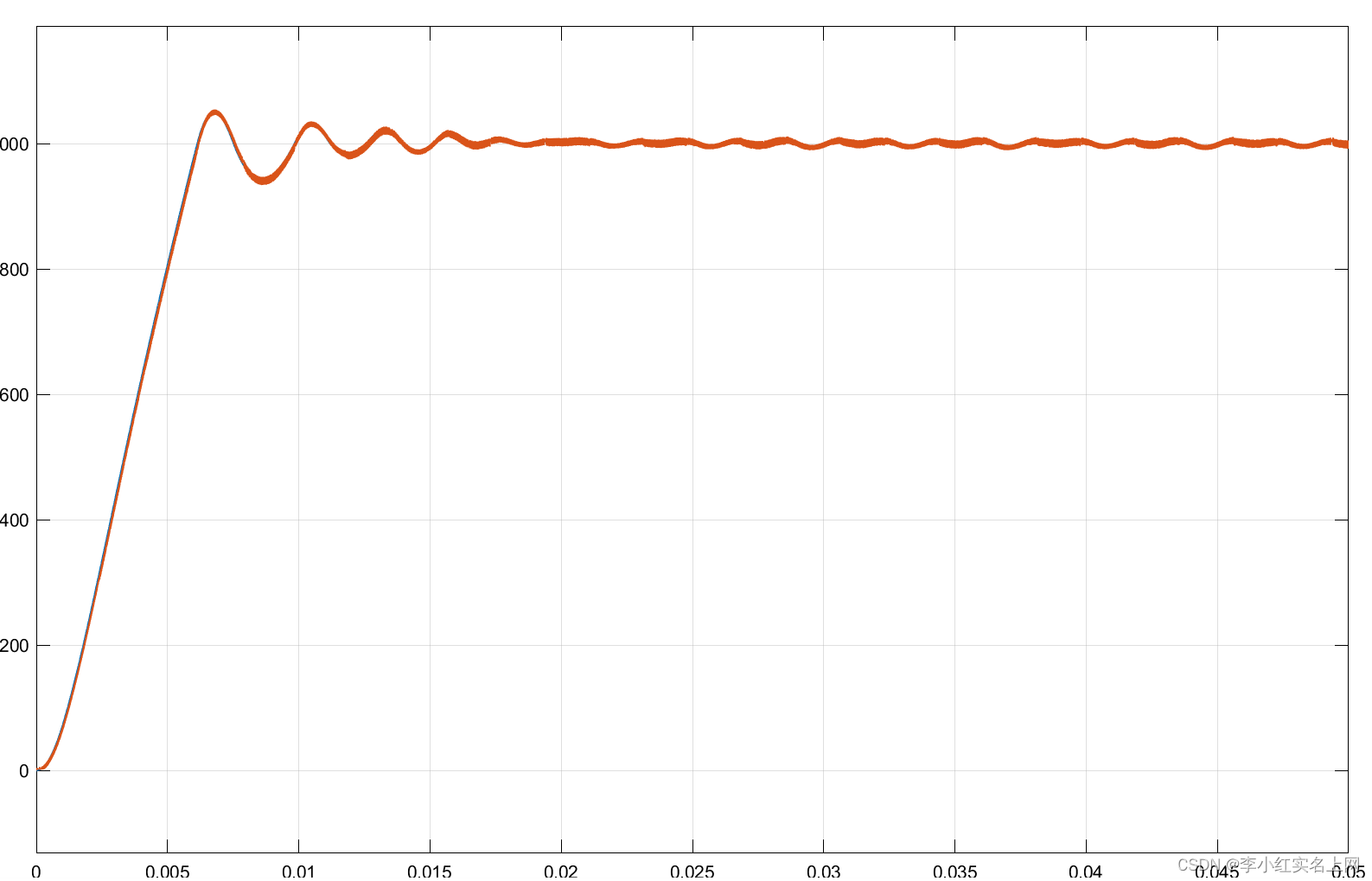
滑模控制转速误差与实际转速误差















 316
316











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









