






扩展反电动势无位置传感器估算方法推导
本文是个人工作中的学习笔记,主要是通过扩展反电动势的方式,针对FOC控制无位置传感器转子位置估算进行推导,在风机中得到量产使用。
一、与位置传感器控制结构的差异
1.1带位置传感器FOC控制结构图
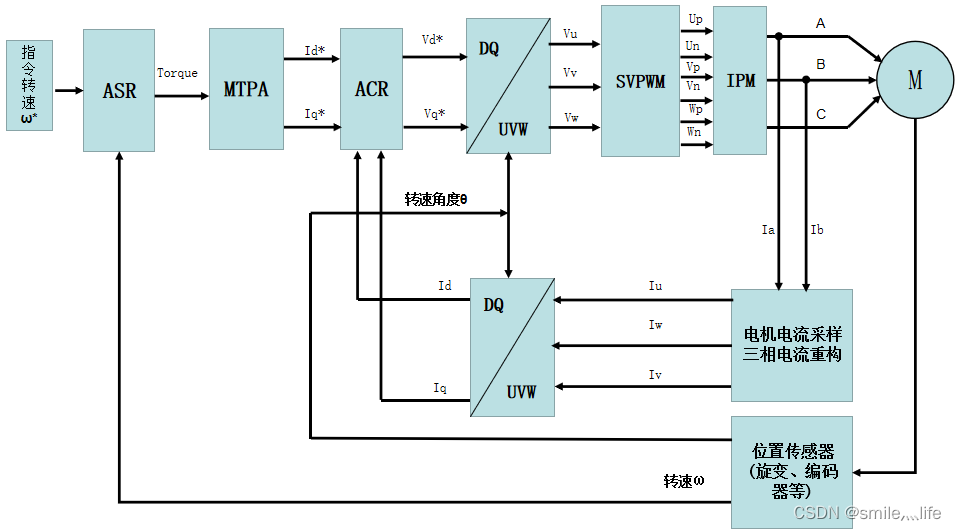
1.2无位置传感器FOC控制结构图

二、.估算方法的推导
无位置传感器估算方法,根据实际的转子位置θ_d和控制系统中设想的位置θ_dc之差∆θ=θ_dc-θ_d来进行位置和转速的估算。
实际估算过程中主要根据采样电机的三相电流信息来来获取控制轴和转子实轴的角度差∆θ来进行转子的转速和位置的估算。
符号说明:
ω1:变频输出角频率 (rad/s),
ωre:马达旋转電気角速度 (rad/s) ,
ωs = ω1-ωre:差频率数 (rad/s),相当电机的滑动频率
θ_d:实际转子和参考轴(一般式电机A相)的夹角
θ_dc:控制轴和参考轴(一般式电机A相)的夹角
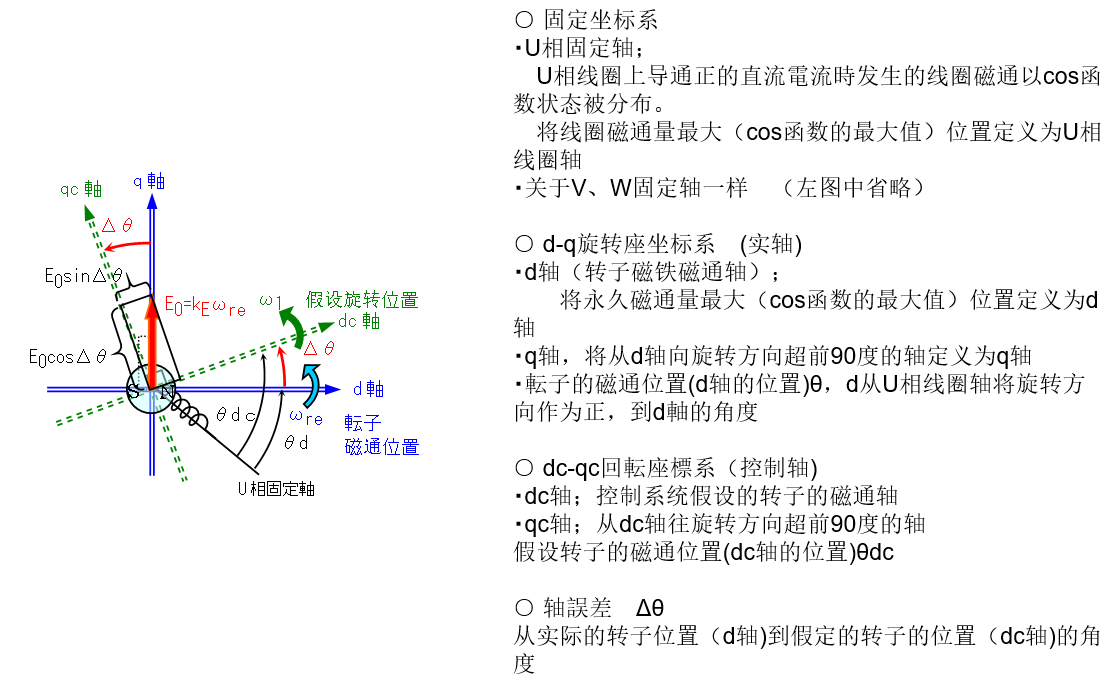
2.1 突极型电机U相等效电路和各个物理量的相位关系

2.2 电机相电压、电流和DQ轴电压、电流关系
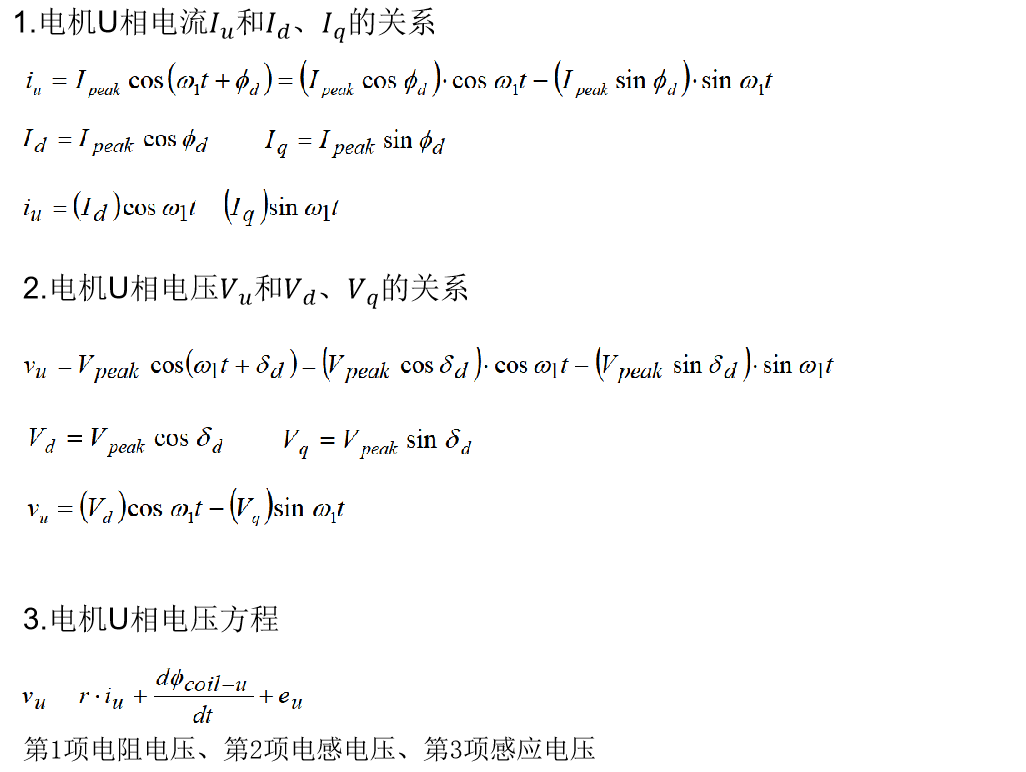
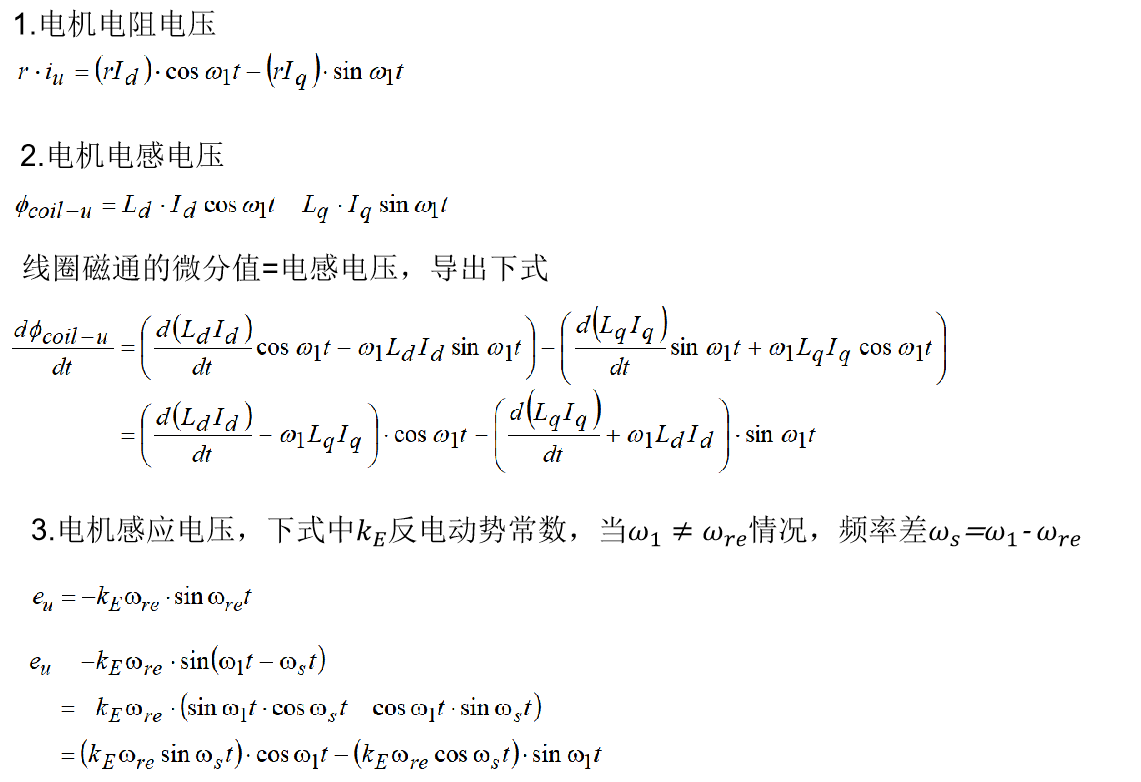
2.3 电机相电压方程各项电压的导出
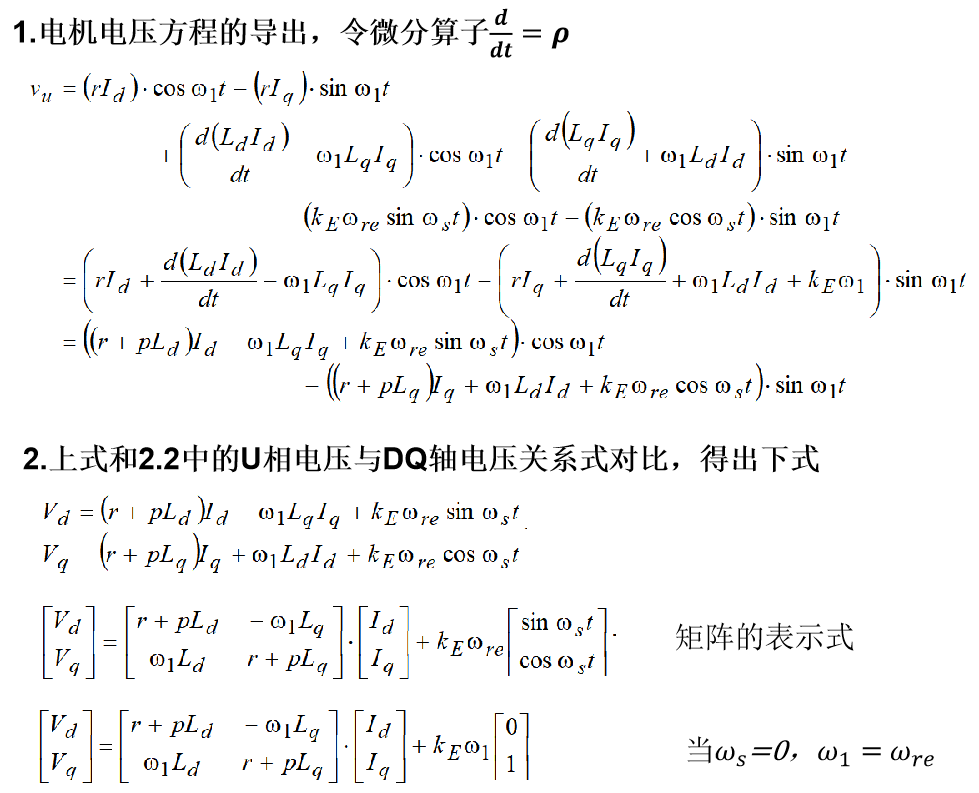
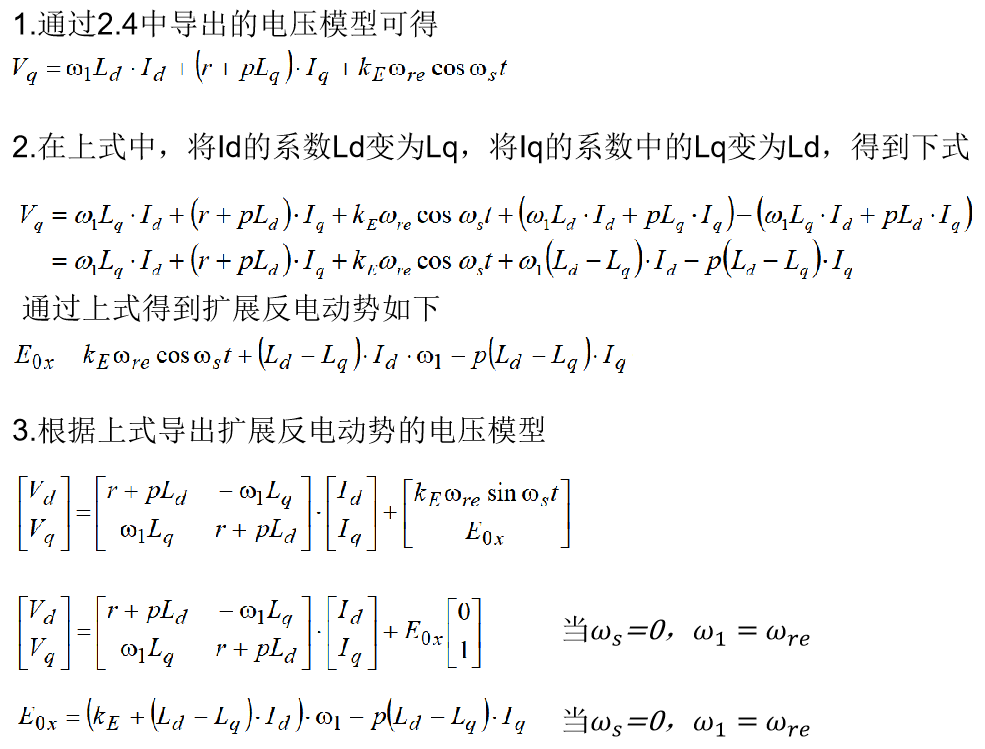
2.4 电机电压方程模型导出
2.5 扩展反电动势模型的导出
2.6 轴误差的概念
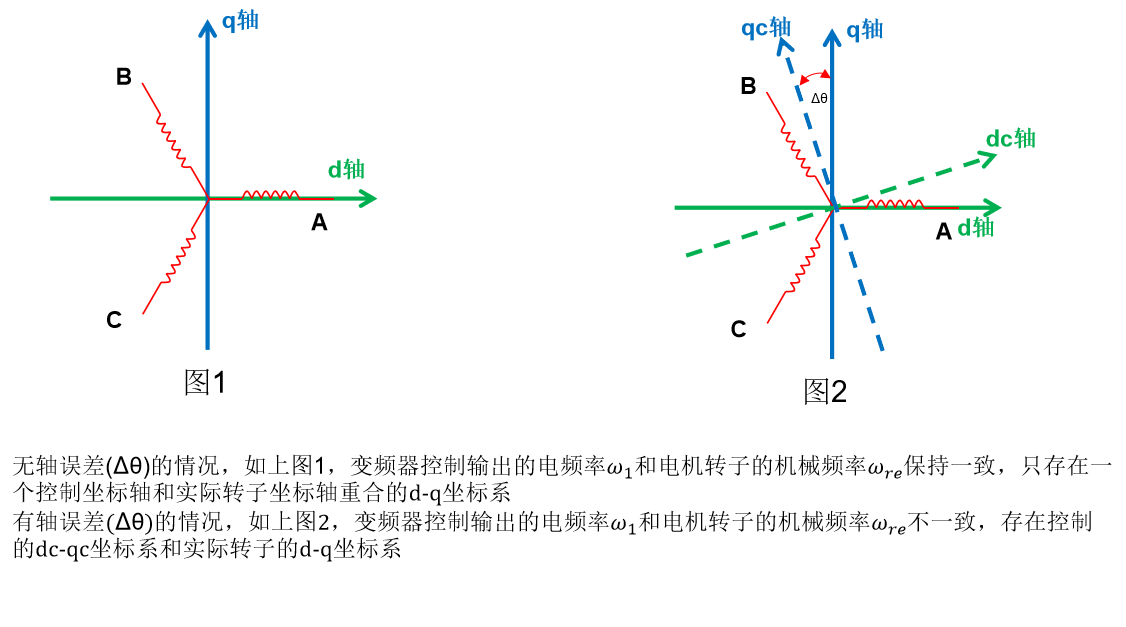
2.7 坐标轴以及轴误差的定义
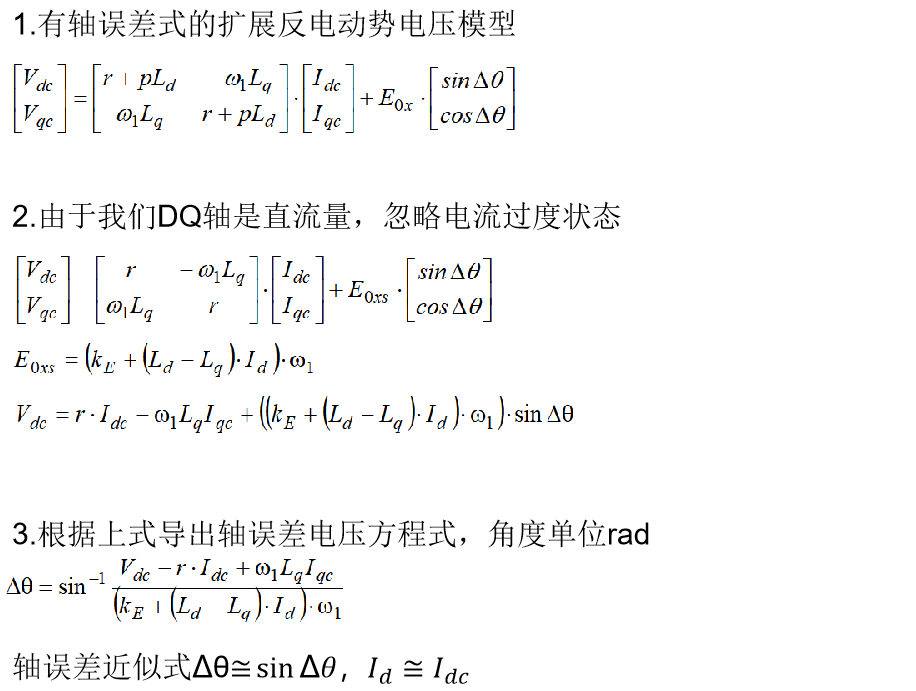
2.8 扩展反电动势导出式
三、转速和位置的估算框图

原创博文,未经同意不得转载。


















 1759
1759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











