






本节此介绍GD32F470梁山派移植正点原子的mpu6050例程,本次只针对程序进行移植处理不对程序进行讲解,主要是更改引脚,以及DMP库的移植
- 将正点原子的MPU6050文件夹粘贴进Hardware文件,mpuiic文件是软件模拟iic程序,mpu6050.c为模块相关初始化函数,eMPL是DMP相关的库函数。
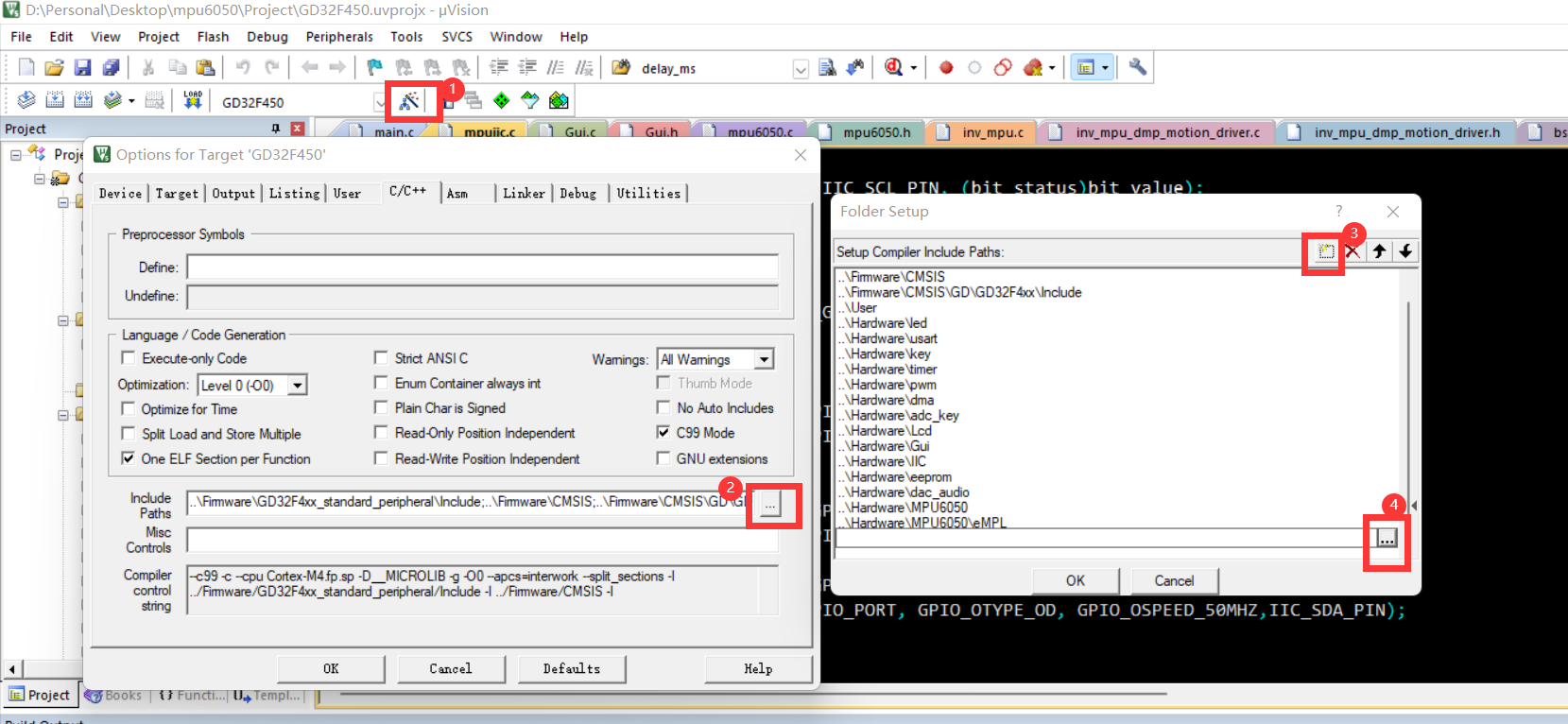
2.添加头文件路径,按照下图所示 1 2 3 4 顺序依次点击,
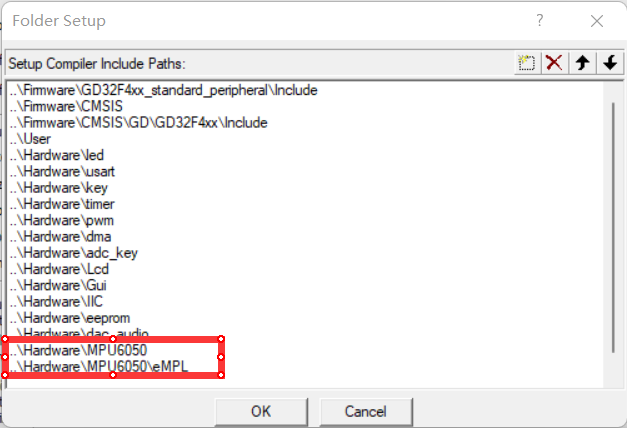
选择MPU6050文件夹以及eMPL文件夹,添加好后如下图所示
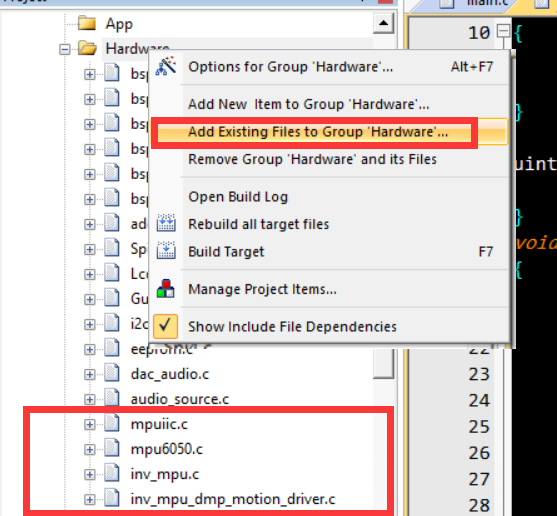
把用到的.c相关文件添加到工程里。
-
模拟iic驱动程序,引脚模式设置为开漏模式 外加上拉电阻,pb10->scl pb11->sda
#include "mpuiic.h" void my_i2c_w_SDA(uint8_t bit_value) { gpio_bit_write(IIC_SDA_GPIO_PORT, IIC_SDA_PIN, (bit_status)bit_value); delay_1us(10); } void my_i2c_w_SCL(uint8_t bit_value) { gpio_bit_write(IIC_SCL_GPIO_PORT, IIC_SCL_PIN, (bit_status)bit_value); delay_1us(10); } uint8_t my_i2c_r_SDA(void){ return gpio_input_bit_get(IIC_SDA_GPIO_PORT, IIC_SDA_PIN); } void MPU_IIC_Init() { rcu_periph_clock_enable(IIC_SCL_GPIO_CLK); rcu_periph_clock_enable(IIC_SDA_GPIO_CLK); /* configure led GPIO port */ gpio_mode_set(IIC_SCL_GPIO_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP,IIC_SCL_PIN); gpio_output_options_set(IIC_SCL_GPIO_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,IIC_SCL_PIN); gpio_mode_set(IIC_SDA_GPIO_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP,IIC_SDA_PIN); gpio_output_options_set(IIC_SDA_GPIO_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,IIC_SDA_PIN); } //i2c的起始 void MPU_IIC_Start(void){ //SDA高,SCL高,SDA低,SCL低; my_i2c_w_SDA(1); my_i2c_w_SCL(1); my_i2c_w_SDA(0); my_i2c_w_SCL(0); } //i2c的结束 void MPU_IIC_Stop(void){ my_i2c_w_SDA(0); my_i2c_w_SCL(1); my_i2c_w_SDA(1); } //SDA发送一个byte void MPU_IIC_Send_Byte(uint8_t byte_to_send){ uint8_t i; for(i = 0; i < 8; i++){ my_i2c_w_SDA(byte_to_send & (0x80>>i)); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } } //SDA读一个byte uint8_t MPU_IIC_Read_Byte(unsigned char ack){ uint8_t i; uint8_t result = 0x00; my_i2c_w_SDA(1); for(i = 0; i < 8; i++){ my_i2c_w_SCL(1); if(my_i2c_r_SDA()) result = result | (0x80>>i);//读SDA的bit值 my_i2c_w_SCL(0); } if (!ack) MPU_IIC_NAck();//发送nACK else MPU_IIC_Ack(); //发送ACK return result; } //主机应答 void MPU_IIC_Ack(void){ my_i2c_w_SCL(0); my_i2c_w_SDA(0); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } //主机非应答 void MPU_IIC_NAck(void){ my_i2c_w_SCL(0); my_i2c_w_SDA(1); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } //主机接收应答 //返回值:1,接收应答失败 // 0,接收应答成功 uint8_t MPU_IIC_Wait_Ack(void){ uint8_t ack_result; my_i2c_w_SDA(1); my_i2c_w_SCL(1); ack_result = my_i2c_r_SDA(); my_i2c_w_SCL(0); return ack_result; }- DMP库的移植,主要更改下面两个文件这几个函数的宏定义,我这里已经改好。
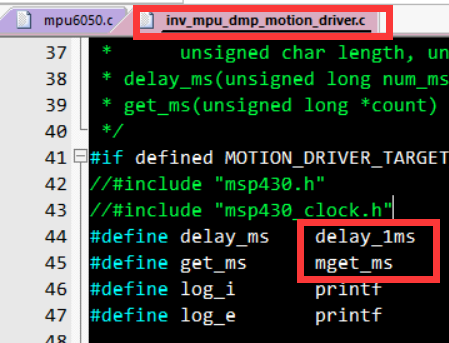
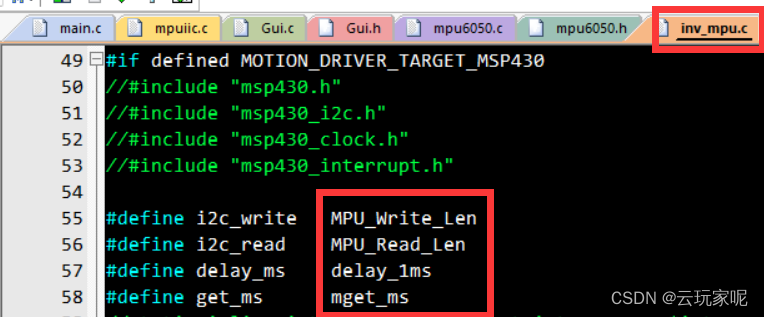
- DMP库的移植,主要更改下面两个文件这几个函数的宏定义,我这里已经改好。
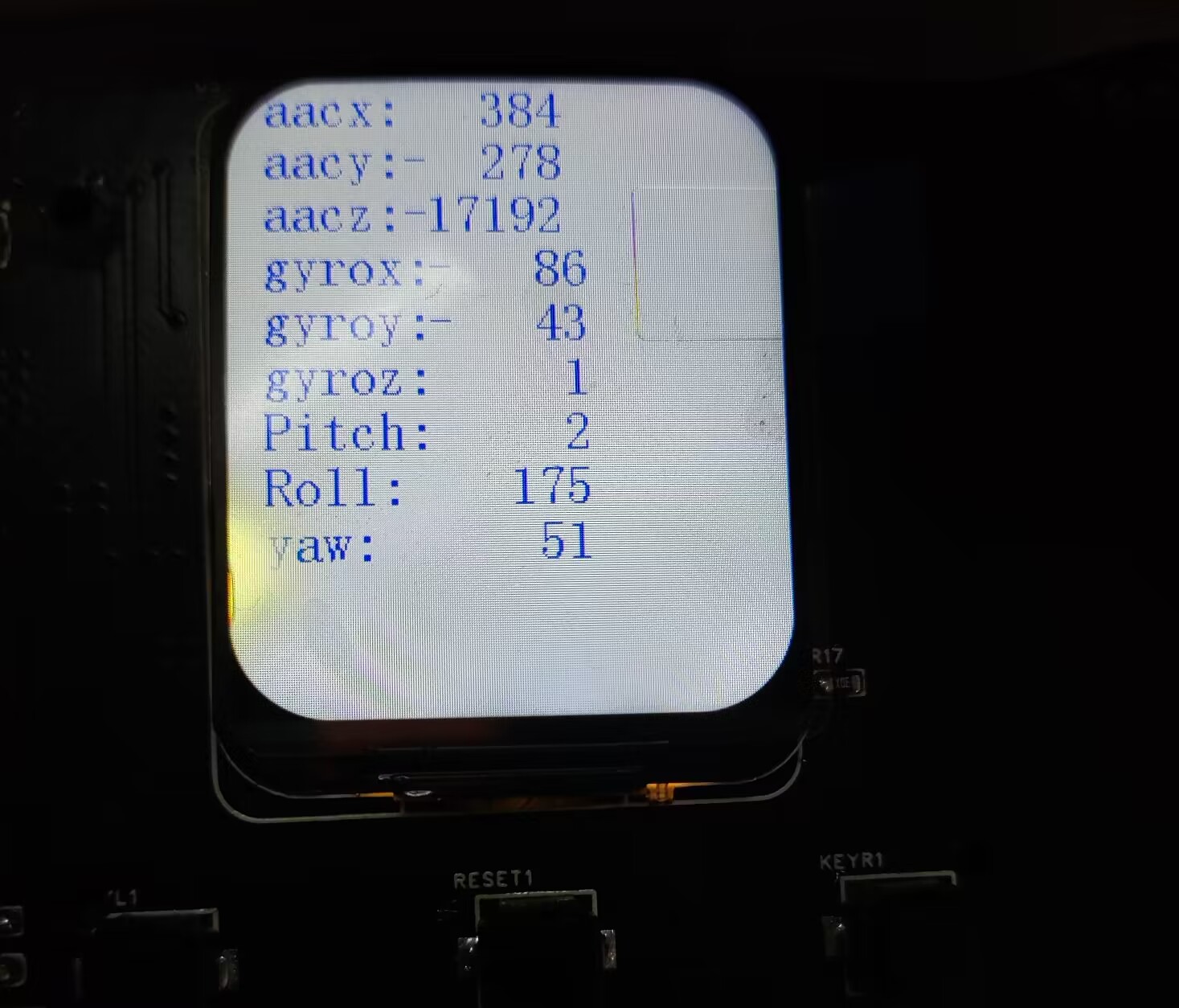
5.移植好后调用下图所示相关函数就可以输出欧拉角了
if(mpu_dmp_get_data(&pitch,&roll,&yaw) == 0)
{
if(pitch<0){
LCD_ShowChar(85,144,'-',COLOR_BLUE,COLOR_WHITE,24,0);
pitch = -pitch;
}else LCD_ShowChar(85,144,' ',COLOR_BLUE,COLOR_WHITE,24,0);
LCD_ShowIntNum(95,144,pitch,5,COLOR_BLUE,COLOR_WHITE,24);
if(roll<0){
LCD_ShowChar(85,168,'-',COLOR_BLUE,COLOR_WHITE,24,0);
roll = -roll;
}else LCD_ShowChar(85,168,' ',COLOR_BLUE,COLOR_WHITE,24,0);
LCD_ShowIntNum(95,168,roll,5,COLOR_BLUE,COLOR_WHITE,24);
if(yaw<0){
LCD_ShowChar(85,192,'-',COLOR_BLUE,COLOR_WHITE,24,0);
yaw = -yaw;
}else LCD_ShowChar(85,192,' ',COLOR_BLUE,COLOR_WHITE,24,0);
LCD_ShowIntNum(95,192,yaw,5,COLOR_BLUE,COLOR_WHITE,24);
}
完整代码工程放在这里了,需要自取
https://gitee.com/yin-jiyuan123/module-migration.git
效果如下















 768
768











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









