






本篇博客纯属个人心得感悟与开发过程中的各种阻碍,个人感情成分极大,属于瞎发着玩的。
前些日子闲来无聊,看到了b站上面的各种轮足机器人视频,尤其是珠海航展上面的轮组机器人(找不到视频了,感觉也有可能是营销号拼接的视频),遂心中产生轮足机器人的开发想法。

云深处科技的轮足机器人(太牛批了)
根据b站上的DengFoc的视频,了解了一下这东西的技术路线是先学无刷电机FOC控制,然后再学PID控制,之后是平衡车,再之后是学轮足机器人。
先介绍一下博主的水平,常规混吃等死刚毕业自动化专业二本大学生(甚至末流二本),本科期间太无聊怒学无人机,对无刷电机还是有些许了解,但是之前的无刷电机都是靠电调驱动的(唉捞的一批,还贵的一)。学过一部分hal库,内心对Arduino看不起(经典眼高手低,没水平还搁那里瞎BB)。pcb主打一手无师自通,在大四实习期间得到过西门子高级硬件工程师指点(其实是实习公司大佬舍友,公司项目板子太烂了过来帮忙)。机械设计只会sw画方块,破解版还一堆bug。
其实能看出来博主纯纯冲击波,一定程度上还没有大一学生好学和有好奇心,但是现在上班太无聊了,晚上天天打彩虹六号也没意思,就想干点事(游戏水平也差的一批天天挨喷)遂想起大二的心愿:“我要做一台和彩虹六号里面的小车一样的东西!”于是搁置到现在,那么不妨让我给我的小小心愿加个码,做一个高级一点的小小轮足机器人吧(要是有钱做大号的也好啊)
再来是定一下一些个人小要求吧:本人虽然菜的一,但是跟头犟驴一样,主打一手重复造轮子,网上现成的模块不用,自己画板子自己焊,而且b站上面dengfoc的视频用的是esp32,我就用stm32,反正好用就行,至于32的选型先挑一个f4系列的吧,我代码写的烂,f4的算力应该顶得住(实在不行H7)。然后一些功能模块尽量自己写,写不出来也要在CV之前把其他人的代码看懂了再整,另外我由于以前爱玩无人机,那就要用航模遥控器遥控,用Sbus模式接收信号。
说一下当前的进度:现在是下载了Dengfoc的一些资料,看了看原理图,初步了解了大概要干嘛,反正无刷电机三根线,一定给它拿下。
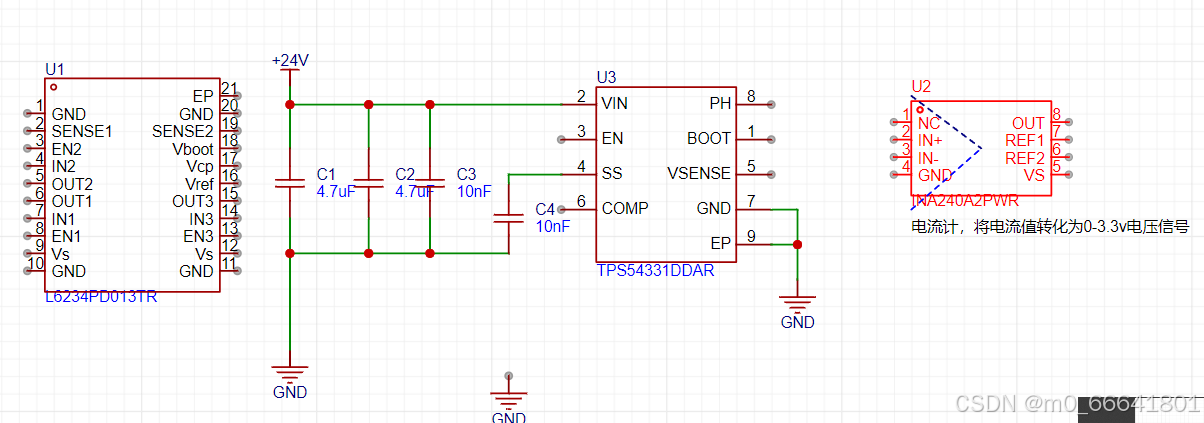
核心是这三芯片,左边的贼贵的L6234PD013TR是意法半导体的无刷电机管理芯片,大概看了下数据手册,意思是IN引脚是把控制的电压灌进去控制mos管(好像是PWM控制的?),EN是高低电平控制相应的OUT引脚输出电压,out引脚的电压是IN角疑似pwm占空比控制的(反正博客瞎写的,主打一手先质疑后验证)。
中间的是个电压管理芯片,3-28V电压从Vin口灌进去,输出你通过各种调电阻比例来制定(德州仪器的数据手册看起来就是舒服,连参考电路图和PCB都给,省心啊)
右边的是个电流计,其实之前公司项目也用过这种东西,但是这玩意我没把握就没用上,现在回旋镖了捏,两个IN口并个小电阻接到电机一项上就可以拿电流值然后32adc一读就行。
电路图没怎么细画,过两天上班摸鱼偷偷画。
然后是程序,这边看了DENGFOC的克拉克变换和帕克变换,照着程序写了个MATLAB脚本,放仿真里面跑的不对劲,过两天再截图发进来。
今天就这些,其实我现在作为刚毕业大学生,挺无所适从的,总感觉要被裁,自己水平不咋地,游戏游戏打的和猪一样,平时宅家也不想出门,这么一想,耶,好像哥们这辈子真一事无成了,那就赌一把,我觉得我这人有天赋,毕竟我老爹是电工,有基因在,我可能对这些无聊小发明感兴趣,又觉得自己可能拿不下决心,就写博客好吧,说不定能一直写下去,不过也有可能哪天中道崩殂了。(QAQ)
就这样,作为一个刚毕业半年不到大学生的小博客。

















 8272
8272

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









