










做笔记的时候,我把[15.5_Nonlinear Backstepping Controller_补充习题]跳过了。后面的做完了,空了再做。
6月初应该非线性的就结束了。
DR_CAN老师视频地址:https://www.bilibili.com/video/BV1yW411u7qvspm_id_from=333.999.0.0
自适应控制器(Adaptive controller)
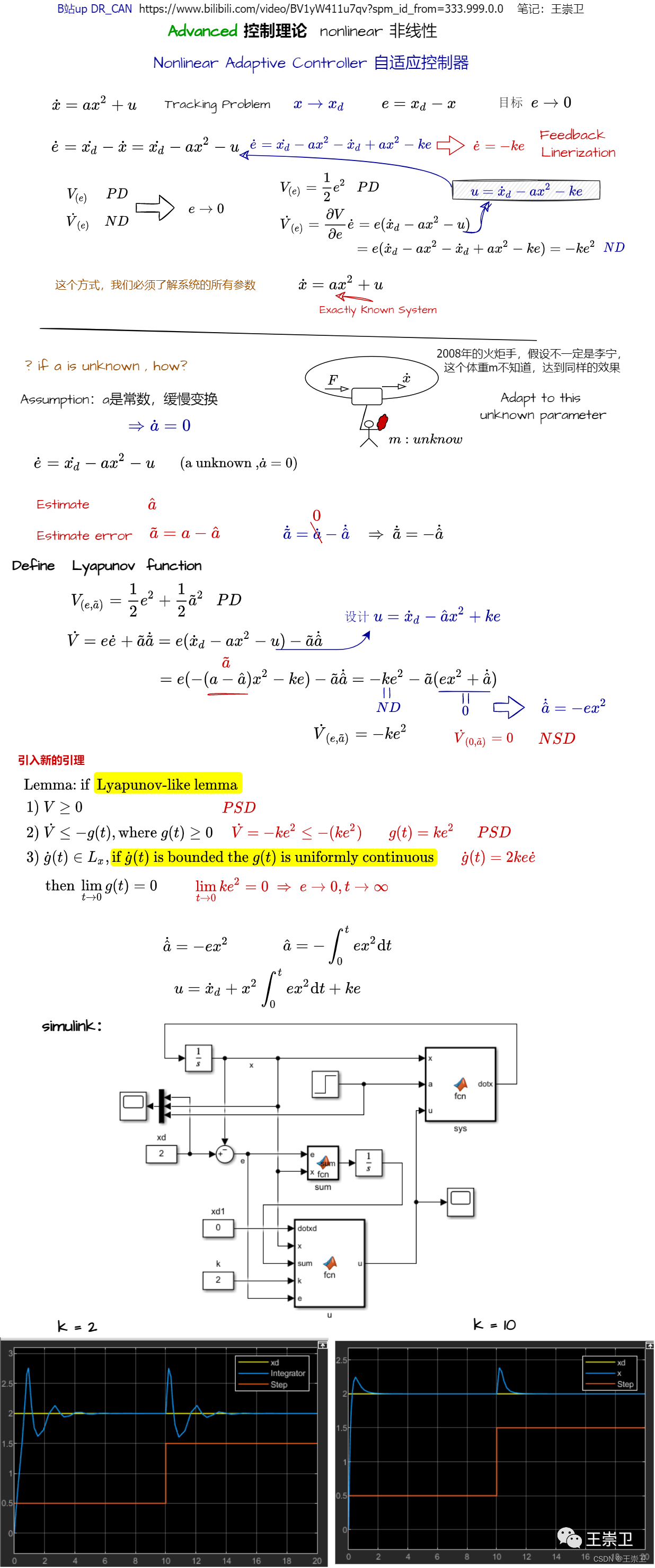
- 回顾上节,反馈线性化控制器的实现。发现这个方式,我们必须了解系统的所有参数。系统必须是exactly known system。
- 假如其中参数不知道,怎么办。比如2008年的小车吊着火炬手匀速前进,这个人不是李宁而是姚明,这个体重是未知的,要达到同样的效果。控制器要适应这个未知的参数。。
- 参数是一个常数,缓慢变化的数,数学意义,导数为0。
- 构建a的估计参数,结合Lyapunov稳定性进行设计,设计常数的自适应率,和控制器u。
- simulink,仿真。
[非线性控制理论]3_基础反馈稳定控制器设计
[非线性控制理论]2_不变性原理
[非线性控制理论]1_Lyapunov直接方法















 412
412











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









