







时隔一年,重新将去年暑假的赛题找出来做了做。
分析了当时比赛的心态和不足,认真复盘以后给出了新的解答过程。
总体完成下来很顺,但是当时比赛的时候可能是受到了心态的影响导致结果不如人意。
一、题目
试题:激光点云数据的平面分割
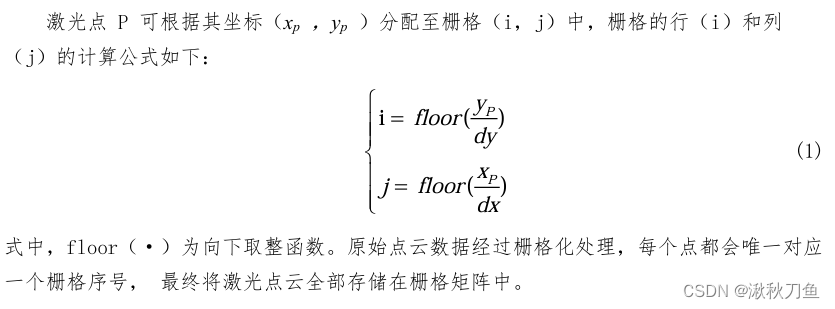
点云数据分割的目标是将具有相似特征的点聚类成均匀区域,主要方法有基于边缘信 息的分割、基于模型拟合的分割、基于属性的分割等多种方法。本题主要基于采用基于栅 格投影的点云分割算法和随机抽样一致(RANSAC)平面分割方法。
1.基于栅格投影的点云分割算法
将原始点云进行栅格化,计算栅格单元高度差、平均高度和高度方差信息,综合三个 指标实现地面点云快速分割。
1.1 点云数据栅格化
如图 1 所示,将研究区域分成10×10个栅格,栅格单元的长(dx)和宽(dy)取值为10m。

解决这个问题,划分栅格是一个非常重要的步骤,考验对列表和数组的应用。
List<AllPoint> Allpoints = new List<AllPoint>();
List<AllPoint>[,] PointClouds;
List<Polygon> polygon = new List<Polygon>();
List<J2Points> J2Points = new List<J2Points>();
List<Polygon2> polygon2 = new List<Polygon2>();
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog op = new OpenFileDialog();
op.Filter = "文本文件(*.txt)|*.txt";
if (op.ShowDialog() == DialogResult.OK)
{
string filename = op.FileName;
StreamReader sr = new StreamReader(filename);
string[] info = sr.ReadLine().Split(',');
//AllPoint point;
while (!sr.EndOfStream)
{
info = sr.ReadLine().Split(',');
string num = info[0];
double x = Convert.ToDouble(info[1]);
double y = Convert.ToDouble(info[2]);
double z = Convert.ToDouble(info[3]);
AllPoint point = new AllPoint(num, x, y, z);
//point = new AllPoint(num, x, y, z);
Allpoints.Add(point);
}
}
richTextBox1.Text = "NUM," + "X," + "Y," + "Z," + "\n";
foreach (var point in Allpoints) { richTextBox1.Text += point.Num + "," + point.X + "," + point.Y + "," + point.Z + "\n"; }
PointClouds = new List<AllPoint>[dx, dy];
for (int i = 0; i < 10; i++)
{
for (int j = 0; j < 10; j++)
{
PointClouds[i, j] = new List<AllPoint>();
}
}
foreach (var point in Allpoints)
{
//计算行列号
int i = (int)Math.Floor(point.Y / dy);
int j = (int)Math.Floor(point.X / dx);
if ((point.X / 10) > 0 && (point.X / 10) < dx && (point.Y / 10) > 0 && (point.Y / 10) < dy)
{
PointClouds[i, j].Add(point);
}
}
}主要的算法实现在这个部分。首先划分10×10个栅格,然后遍历存放点云的列表,首先判断列表中点的行列号,然后将点云依次添加到对应的栅格中。解决了这一步以后&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 6698
6698











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











