









平面模型拟合在PCL库中可以设置模型类别,这个算法并不是真正意义上的分割,他只能分割出平面上的点云,但是在“点云分割(3)”中涉及到该方法,目的是将地面,墙壁等这些平面过滤了,就可以更好地进行分割。这个方法很简单,只有一个参数需要调整。
如图所示为例程得到的结果:
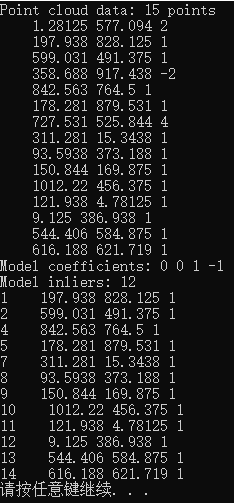
具体过程为:随机产生15个点云数据,都在z=1的平面上,其中人为设置了3个错误点,通过该模型,可以得到平面的四个参数和正确点的个数(12个),并且将正确点的坐标输出。
接下来是基于最小割的算法,先上整理的PPT~
 本文介绍了使用PCL库进行平面模型拟合来分割点云,该方法能有效过滤地面和墙壁等平面,便于后续分割。接着讲解了基于最小割的点云分割算法,该算法利用图论知识,通过构建点云间的图和权重,实现分割。最小割方法适用于水平排列的点云图像,但仅能在水平方向分割。文中分享了学习心得并鼓励读者交流讨论。
本文介绍了使用PCL库进行平面模型拟合来分割点云,该方法能有效过滤地面和墙壁等平面,便于后续分割。接着讲解了基于最小割的点云分割算法,该算法利用图论知识,通过构建点云间的图和权重,实现分割。最小割方法适用于水平排列的点云图像,但仅能在水平方向分割。文中分享了学习心得并鼓励读者交流讨论。
平面模型拟合在PCL库中可以设置模型类别,这个算法并不是真正意义上的分割,他只能分割出平面上的点云,但是在“点云分割(3)”中涉及到该方法,目的是将地面,墙壁等这些平面过滤了,就可以更好地进行分割。这个方法很简单,只有一个参数需要调整。
如图所示为例程得到的结果:
具体过程为:随机产生15个点云数据,都在z=1的平面上,其中人为设置了3个错误点,通过该模型,可以得到平面的四个参数和正确点的个数(12个),并且将正确点的坐标输出。
接下来是基于最小割的算法,先上整理的PPT~
 3483
4332
3483
4332











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















