






 本文探讨了矢量控制技术中的滞环电流控制在永磁同步电机(PMSM)中的应用。通过建立仿真模型,分析了在空载、突加负载和突降负载三种工况下,滞环电流控制器的性能。相较于传统的PI控制器,滞环电流控制具有不依赖电机参数、鲁棒性强的优点,但输出电流脉动大,可能引入噪声。仿真结果显示,滞环控制能实现快速动态响应,但在不同工况下可能存在稳态误差,需要通过参数调整或自适应控制来优化。
本文探讨了矢量控制技术中的滞环电流控制在永磁同步电机(PMSM)中的应用。通过建立仿真模型,分析了在空载、突加负载和突降负载三种工况下,滞环电流控制器的性能。相较于传统的PI控制器,滞环电流控制具有不依赖电机参数、鲁棒性强的优点,但输出电流脉动大,可能引入噪声。仿真结果显示,滞环控制能实现快速动态响应,但在不同工况下可能存在稳态误差,需要通过参数调整或自适应控制来优化。
矢量控制技术是借鉴直流电机电枢电流和励磁电流相互垂直,没有耦合以及可以独立控制的思路,以坐标变换理论为基础,通过对电机定子电流在同步旋转坐标系中大小和方向的控制,达到对直轴和交轴分量的解耦目的,从而实现磁场和转矩的解耦控制,使交流电机具有类似直接电机的控制性能。
1 滞环电流控制的基本原理
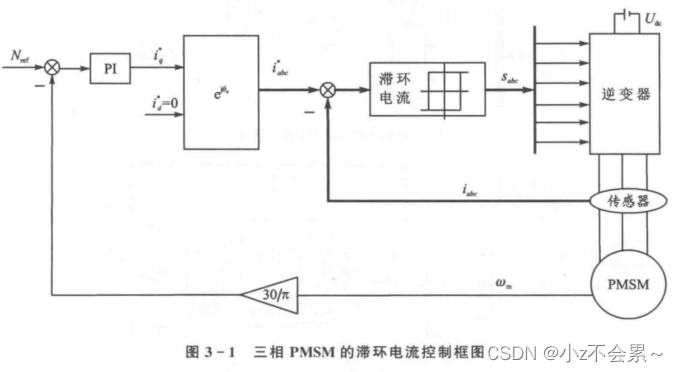
在电压源逆变器中,滞环电流控制提供了一种控制瞬态电流输出的方法。其基本思想是将电流给定信号与检测到的逆变器实际输出电流信号相比较,若实际电流值大于给定值,则通过改变逆变器的开关状态使之减小,反之增大。这样,实际电流给定电流波形作锯齿状变化,并将偏差限制在一定范围内。因此,采用滞环电流控制的逆变器系统包括转速控制环和一个采用bang-bang控制(滞环控制)的电流环,这将加快动态调节和抑制环内扰动,而且这种电流控制方法简单,且不依赖于电机参数,鲁棒性好。
其缺点在于:逆变器的开关频率随着电机运行状况的不同而发生变化,因为滞环控制原理就是不同切换开关,让电流稳定在滞环的带宽内,这个带宽是人为给定的,所以,不同工况下都会对开关的切换频率造成影响,这是无可避免的。其变化范围非常大,运行不规则,输出电流波形脉动较大,并且这些变化都会带来噪声。虽然可以利用引入频率锁相环节或改用同步开关型的数字实现方法来克服上述缺点,但实现起来比较复杂。实际上,因为三相之间的相互联系,电流的纹波值可以达到两倍的滞环大小。
2 仿真搭建
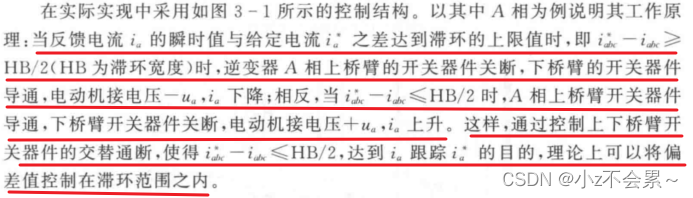
反park模块
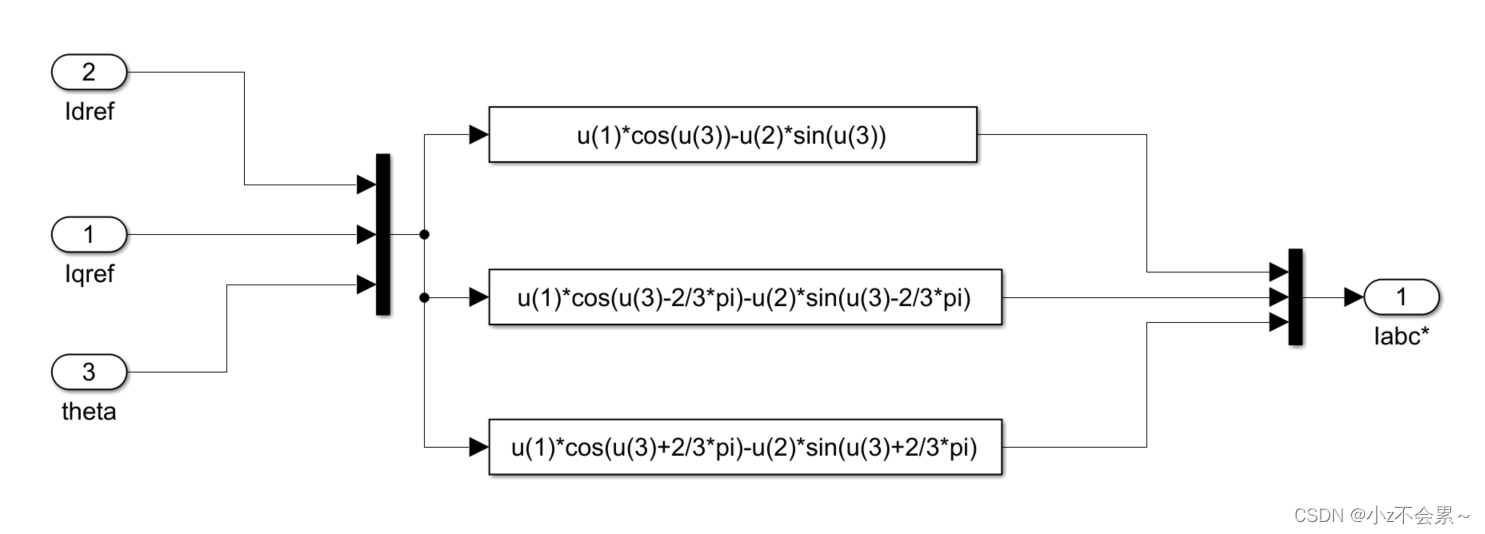
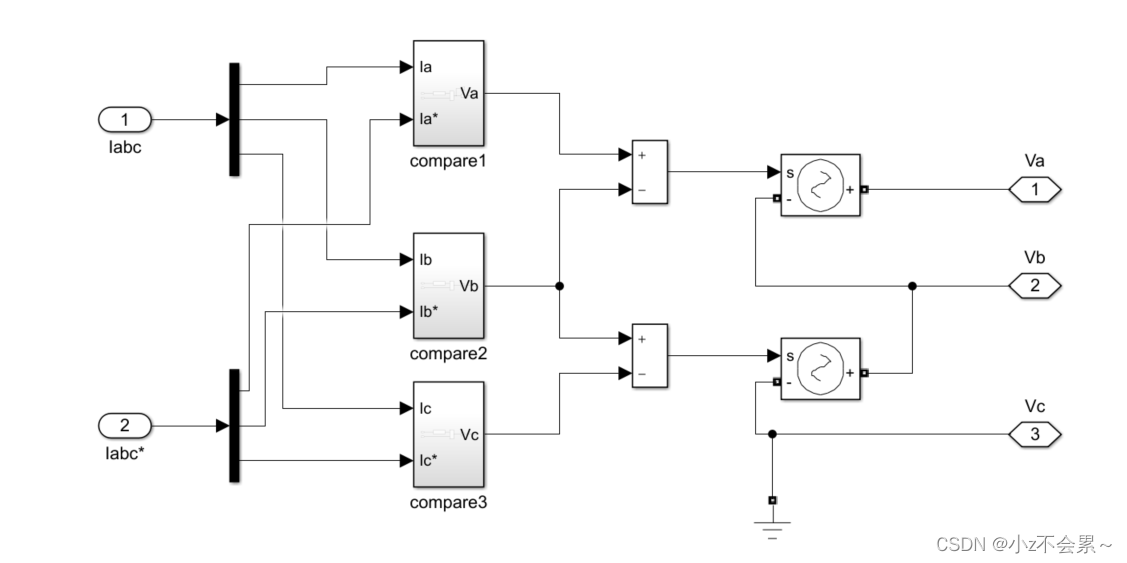
A相滞环电流控制比较模块,B、C模块同理
三相滞环电流控制器,相当于代替了PI控制器和逆变器
系统整体框图
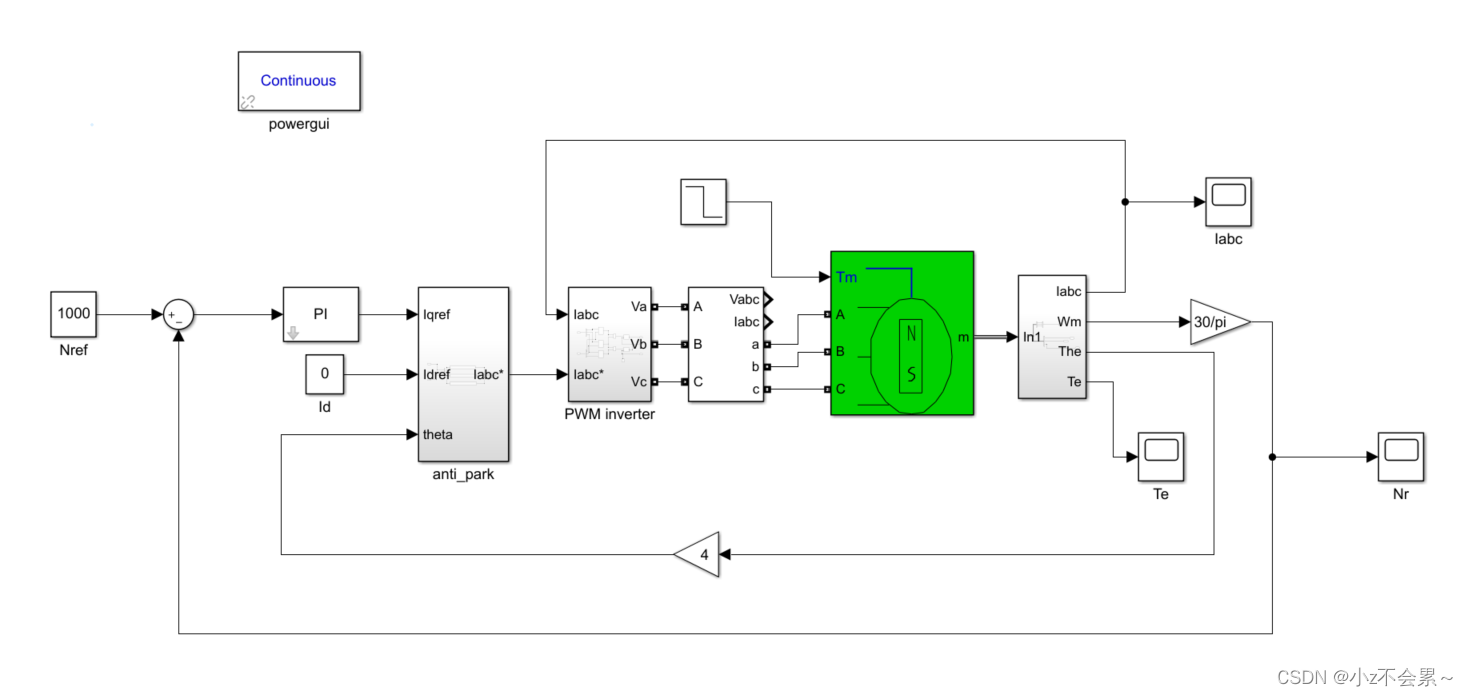
补充说明:三相PMSM数学模型中用到的都是电角度,而电机输出的是机械角度
,两者的关系为
为电机的极对数。给定转速
的单位是转
,而电机输出的转速为机械角速度
单位为
,所以
。
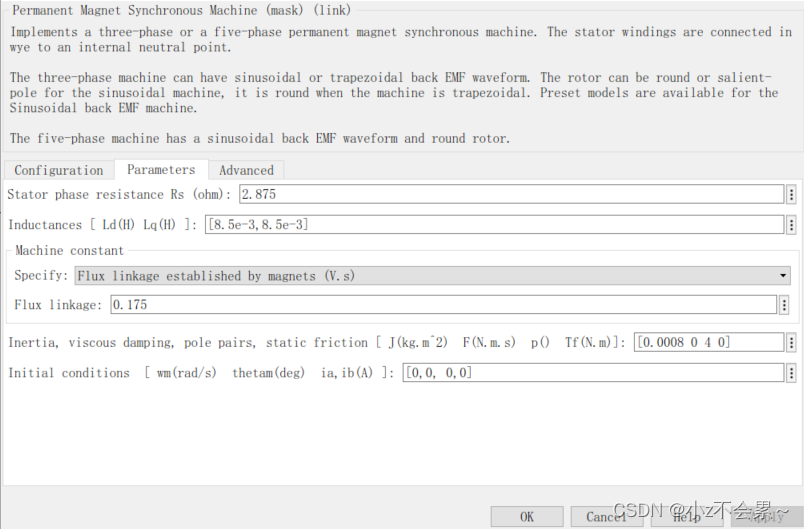
电机的参数设置
仿真验证
滞环比较器参数设置
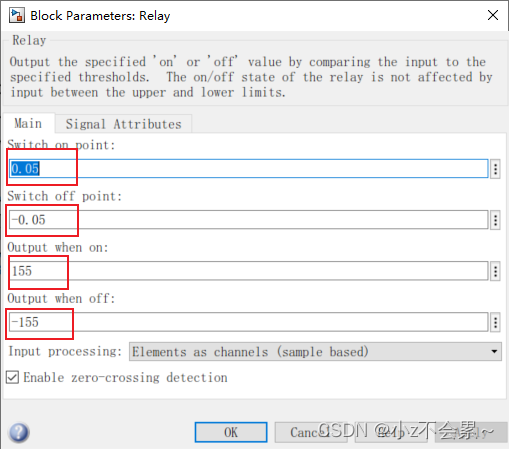
这里滞环带宽设置为0.1,±155对应直流母线电压311V。
空载
转速环PI参数设置,
速度曲线
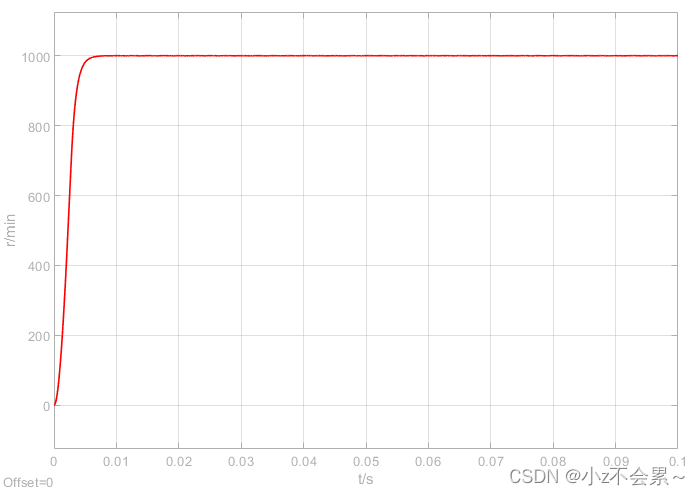
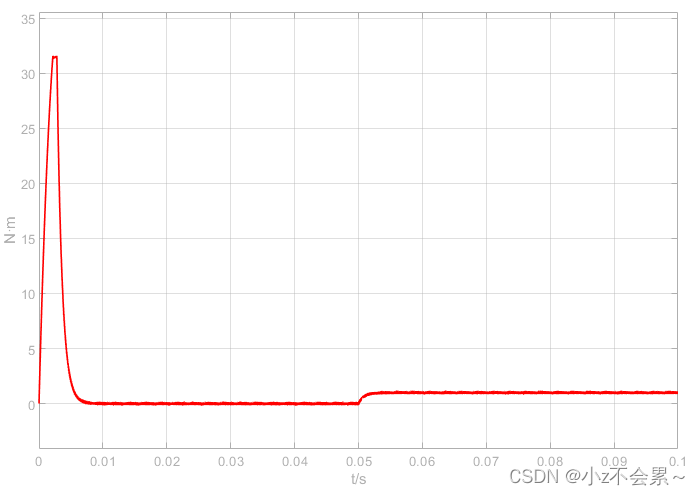
电磁转矩
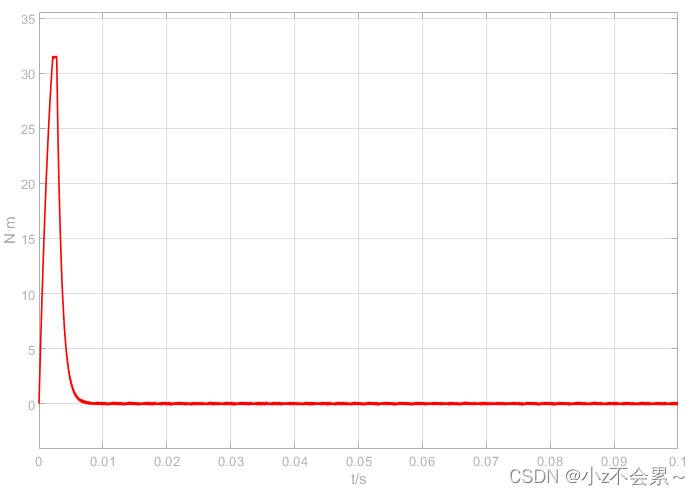
观察仿真结果,响应曲线无超调,且调节时间也较短。
突加负载,在0.05s是负载转矩为
若使用空载情形下PI参数,
速度曲线
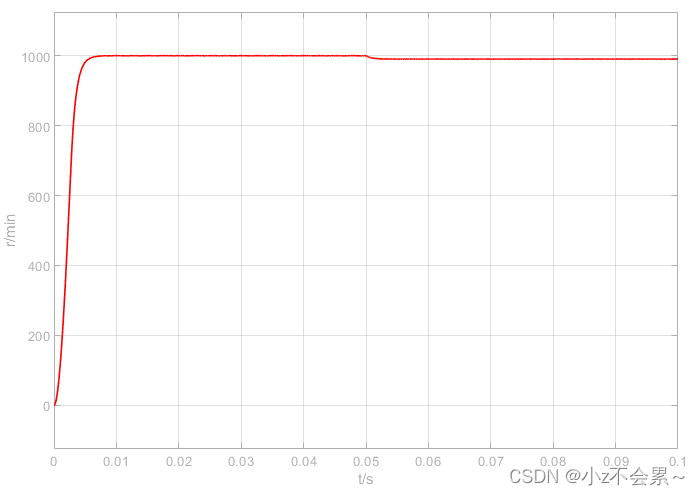
我们发现,速度曲线存在稳态误差。调整PI参数,我们增大
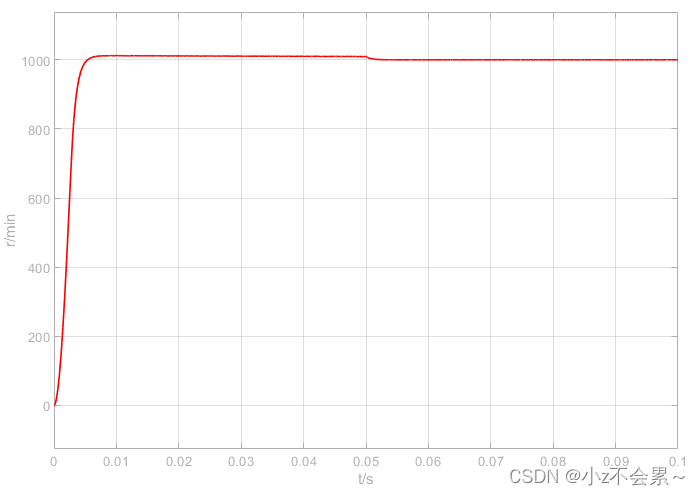
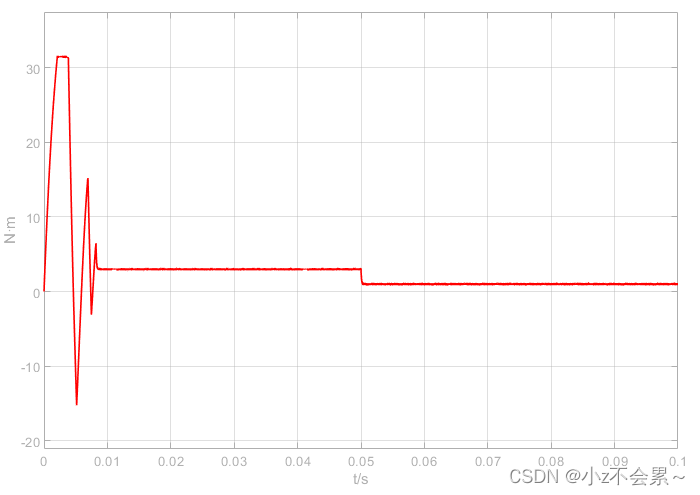
电磁转矩T_e
观察速度曲线,消除了加载后的稳态误差,但加载前又出现了稳态误差,此时整体性能比较好,若想同时消除两段运行工况下的稳态误差,需要用到变参数调节,即自适应控制。
突降负载,初始时刻负载转矩为:在0.05s时变为
采用书中的PI参数,
速度曲线

电磁转矩T_e
三相电流Iabc
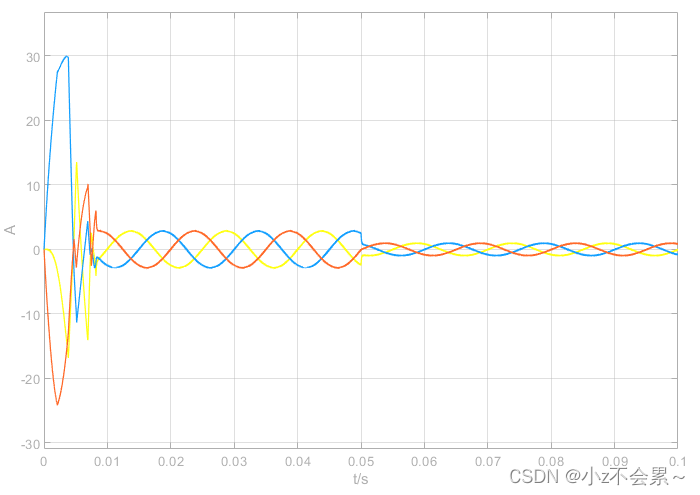
观察上述仿真结果,当电机带载启动,转速从零速上升到参考转速
时,虽然开始时电机转速有一些超调量,但仍然具有较快的动态响应速度;并且在
,负载转矩变为
时,电机也能快速恢复到给定参考转速值。
总结
本文讨论了三种工况下,采用滞环电流控制器下的双闭环控制器的性能,其具有与PI控制器同样优秀的控制性能,并且不依赖电机参数,只需要根据实际需求设置滞环带宽,且鲁棒性好,说明了采用滞环电流控制可以满足电机运行的要求。观察电磁转矩曲线,发现第三种情形下,的波动较大,这在实际运行中应当避免。
本文摘自袁雷的《现代永磁同步电机控制原理及MATLAB仿真》的第三章,自己做了一下滞环控制的仿真,这里做一个记录,方便以后查阅,感谢大家的阅读!!!^_^

















 3977
3977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









