






PATH DECIDER
pathdecider这个决策器较好理解,和之前的决策器一样,主要处理逻辑在process函数,直接进入源代码分析。
源代码所在位置\modules\planning\tasks\deciders\path_decider\path_decider.cc
Status PathDecider::Process(const ReferenceLineInfo *reference_line_info,
const PathData &path_data,
PathDecision *const path_decision) {
// 如果是path_reuseable则跳过
if (FLAGS_enable_skip_path_tasks && reference_line_info->path_reusable()) {
return Status::OK();
}
// 更新障碍物id
std::string blocking_obstacle_id;
if (reference_line_info->GetBlockingObstacle() != nullptr) {
blocking_obstacle_id = reference_line_info->GetBlockingObstacle()->Id();
}
// 主要分析这个函数
if (!MakeObjectDecision(path_data, blocking_obstacle_id, path_decision)) {
const std::string msg = "Failed to make decision based on tunnel";
AERROR << msg;
return Status(ErrorCode::PLANNING_ERROR, msg);
}
return Status::OK();
}
process函数里主要分析MakeObjectDecision这个函数
其源代码如下
可知主要处理逻辑都在MakeStaticObstacleDecision(path_data, blocking_obstacle_id,path_decision)这个函数
同时也是pathdecider这个决策器主要逻辑处理的函数
bool PathDecider::MakeObjectDecision(const PathData &path_data,
const std::string &blocking_obstacle_id,
PathDecision *const path_decision) {
if (!MakeStaticObstacleDecision(path_data, blocking_obstacle_id,
path_decision)) {
AERROR << "Failed to make decisions for static obstacles";
return false;
}
return true;
}
MakeStaticObstacleDecision分析
这里引用Apollo Auto 0.0.1文档中的图片
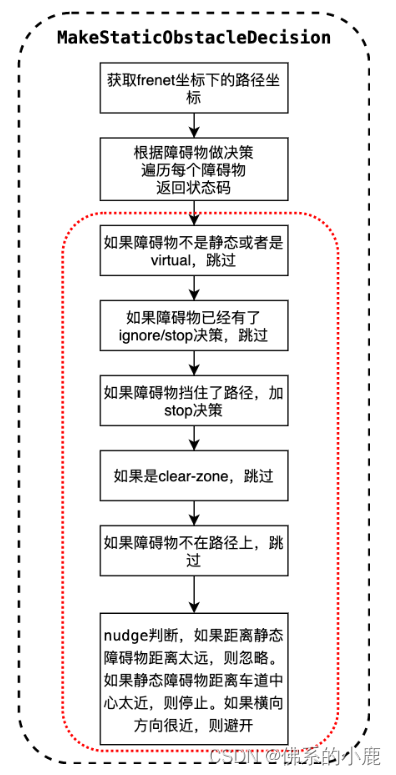
PathDecider::MakeStaticObstacleDecision这个函数主要的处理逻辑这个图表达的十分清楚,之后在结合源代码进行分析。
// TODO(jiacheng): eventually this entire "path_decider" should be retired.
// Before it gets retired, its logics are slightly modified so that everything
// still works well for now.
bool PathDecider::MakeStaticObstacleDecision(
const PathData &path_data, const std::string &blocking_obstacle_id,
PathDecision *const path_decision) {
// Sanity checks and get important values.
ACHECK(path_decision);
// 获得sl坐标系下的路径
const auto &frenet_path = path_data.frenet_frame_path();
if (frenet_path.empty()) {
AERROR << "Path is empty.";
return false;
}
const double half_width =
common::VehicleConfigHelper::GetConfig().vehicle_param().width() / 2.0;
const double lateral_radius = half_width + FLAGS_lateral_ignore_buffer;
// Go through every obstacle and make decisions.
for (const auto *obstacle : path_decision->obstacles().Items()) {
const std::string &obstacle_id = obstacle->Id();
const std::string obstacle_type_name =
PerceptionObstacle_Type_Name(obstacle->Perception().type());
ADEBUG << "obstacle_id[<< " << obstacle_id << "] type["
<< obstacle_type_name << "]";
// 如果障碍物不是静态障碍物或者障碍物是虚拟障碍物,continue
if (!obstacle->IsStatic() || obstacle->IsVirtual()) {
continue;
}
// - skip decision making for obstacles with IGNORE/STOP decisions already.
if (obstacle->HasLongitudinalDecision() &&
obstacle->LongitudinalDecision().has_ignore() &&
obstacle->HasLateralDecision() &&
obstacle->LateralDecision().has_ignore()) {
continue;
}
// 如果障碍物已经有纵向决策且是停止决策,continue
if (obstacle->HasLongitudinalDecision() &&
obstacle->LongitudinalDecision().has_stop()) {
// STOP decision
continue;
}
// - add STOP decision for blocking obstacles.
if (obstacle->Id() == blocking_obstacle_id &&
!injector_->planning_context()
->planning_status()
.path_decider()
.is_in_path_lane_borrow_scenario()) {
// Add stop decision
ADEBUG << "Blocking obstacle = " << blocking_obstacle_id;
ObjectDecisionType object_decision;
*object_decision.mutable_stop() = GenerateObjectStopDecision(*obstacle);
path_decision->AddLongitudinalDecision("PathDecider/blocking_obstacle",
obstacle->Id(), object_decision);
continue;
}
// - skip decision making for clear-zone obstacles.
if (obstacle->reference_line_st_boundary().boundary_type() ==
STBoundary::BoundaryType::KEEP_CLEAR) {
continue;
}
// 0. 默认情况下忽略,如果障碍物根本不在路径s中。
ObjectDecisionType object_decision;
object_decision.mutable_ignore();
const auto &sl_boundary = obstacle->PerceptionSLBoundary();
if (sl_boundary.end_s() < frenet_path.front().s() ||
sl_boundary.start_s() > frenet_path.back().s()) {
path_decision->AddLongitudinalDecision("PathDecider/not-in-s",
obstacle->Id(), object_decision);
path_decision->AddLateralDecision("PathDecider/not-in-s", obstacle->Id(),
object_decision);
continue;
}
// 返回路径上离障碍物最近的点(在sl坐标系下)
const auto frenet_point = frenet_path.GetNearestPoint(sl_boundary);
const double curr_l = frenet_point.l();
double min_nudge_l =
half_width +
config_.path_decider_config().static_obstacle_buffer() / 2.0;
if (curr_l - lateral_radius > sl_boundary.end_l() ||
curr_l + lateral_radius < sl_boundary.start_l()) {
// 1. IGNORE if laterally too far away.
path_decision->AddLateralDecision("PathDecider/not-in-l", obstacle->Id(),
object_decision);
} else if (sl_boundary.end_l() >= curr_l - min_nudge_l &&
sl_boundary.start_l() <= curr_l + min_nudge_l) {
// 2. 如果横向重叠过大,则停止。
*object_decision.mutable_stop() = GenerateObjectStopDecision(*obstacle);
if (path_decision->MergeWithMainStop(
object_decision.stop(), obstacle->Id(),
reference_line_info_->reference_line(),
reference_line_info_->AdcSlBoundary())) {
path_decision->AddLongitudinalDecision("PathDecider/nearest-stop",
obstacle->Id(), object_decision);
} else {
ObjectDecisionType object_decision;
object_decision.mutable_ignore();
path_decision->AddLongitudinalDecision("PathDecider/not-nearest-stop",
obstacle->Id(), object_decision);
}
} else {
// 3. 如果横向方向很近并且可以避让,则避开,添加避让信息。
if (sl_boundary.end_l() < curr_l - min_nudge_l) { // &&
// sl_boundary.end_l() > curr_l - min_nudge_l - 0.3) {
// LEFT_NUDGE
ObjectNudge *object_nudge_ptr = object_decision.mutable_nudge();
object_nudge_ptr->set_type(ObjectNudge::LEFT_NUDGE);
object_nudge_ptr->set_distance_l(
config_.path_decider_config().static_obstacle_buffer());
path_decision->AddLateralDecision("PathDecider/left-nudge",
obstacle->Id(), object_decision);
} else if (sl_boundary.start_l() > curr_l + min_nudge_l) { // &&
// sl_boundary.start_l() < curr_l + min_nudge_l + 0.3) {
// RIGHT_NUDGE
ObjectNudge *object_nudge_ptr = object_decision.mutable_nudge();
object_nudge_ptr->set_type(ObjectNudge::RIGHT_NUDGE);
object_nudge_ptr->set_distance_l(
-config_.path_decider_config().static_obstacle_buffer());
path_decision->AddLateralDecision("PathDecider/right-nudge",
obstacle->Id(), object_decision);
}
}
}
return true;
}
















 2044
2044











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









