







 超级会员免费看
超级会员免费看
背景:
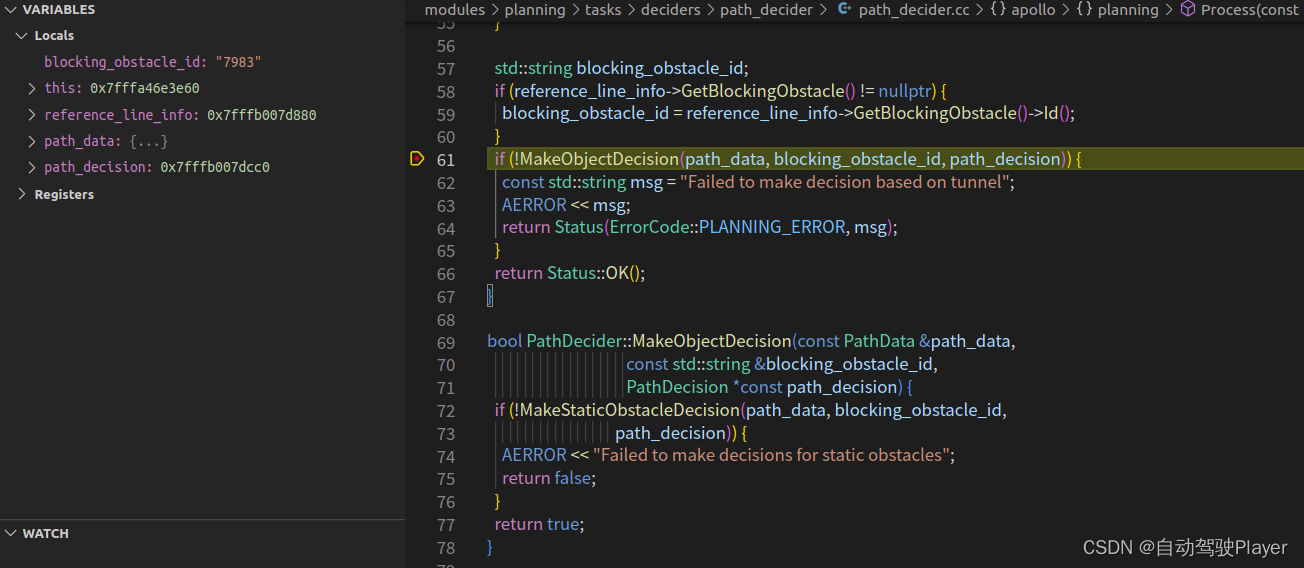
在本专栏之前的文章中有对PathDecider这个task进行介绍,最近后台咨询这个task的小伙伴比较多,所以决定重新对这个task进行分析,加入使用vscode 进行调试时的一些中间过程与变量取值分析,帮助大家更好的理解PathDecider 这个task。
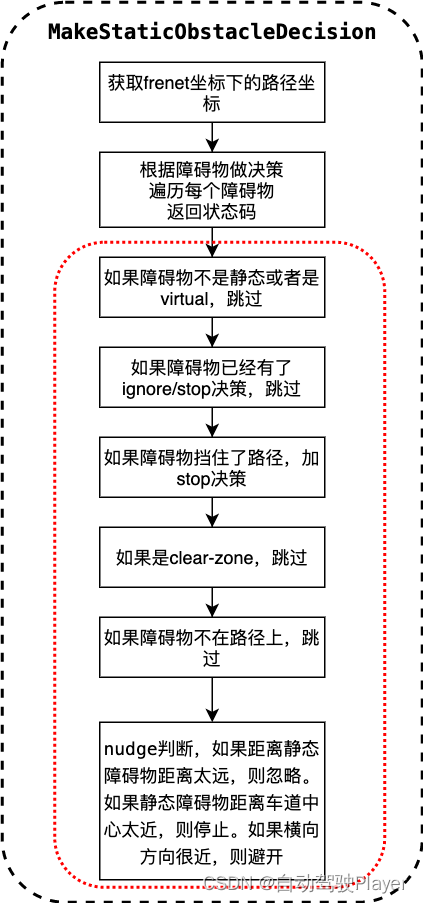
PathDecider 是Apollo Planning决策规划算法中lanefollow 场景下,所调用的第 7 个 task,属于task中的decider 类别它的作用主要是:
- 在上一个任务中获得了最优的路径,PathDecider的功能是根据静态障碍物做出自车的决策,对于前方的静态障碍物是忽略、stop还是nudge
调试场景示例如下:

正文:
一、算法流程图
二、对block obstacle id进行确认,结果如下,block obstacle id 在之前的path bounds 这个task中进行确认。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 2303
2303











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











