






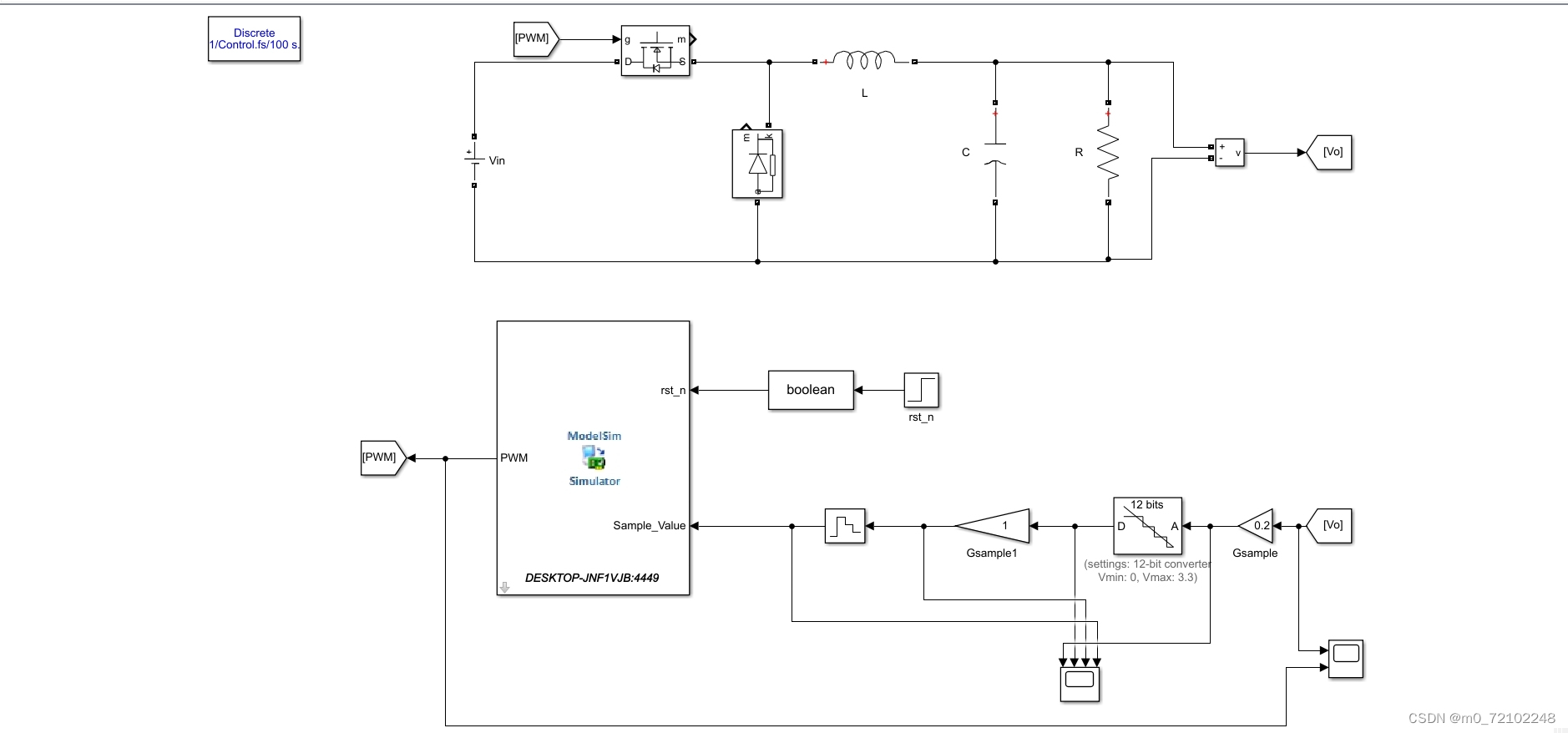
simulink与modelsim联合仿真buck闭环设计
主电路用simulink搭建,控制电路完全有verilog语言实现(包括DPWM,PI补偿器)
适用于验证基于fpga的电力电子变换器控制,由于控制回路完全由verilog语言编写,因此仿真验证通过,可直接下载进fpga板子,极大缩短了开发数字电源的研发周期。
buck变换器指标如下:
(额定输入电压) Vin->20,
(最大输入电压) Vin_max->25,
(最小输入电压) Vin_min->15,
(输出电压)Vo>10,
(开关频率)fs->50*10^3,
(输出功率)Po->100,
(最小占空比)Dmin->0.1,
(额定占空比)D ->0.5,
(最大占空比) Dmax->0.6,
(额定输出电流) Io-> 10
包括:buck主电路以及控制回路设计文档,仿真文件。
以及simulink与modelsim的联合仿真调试说明文档。
ID:78999651044433674 玩电的和尚
玩电的和尚















10-18
 147
147
147
11-11
338
338
06-12
1026
1026
07-31
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









