






目录
在 verilog 里经常会用到有限状态机,处理相对复杂的逻辑,设定好不同的状态,根据触发条件跳转到对应的状态,在不同的状态下做相应的处理。有限状态机主要用到 always 及 case 语句。下面以一个四状态的有限状态机举例说明。
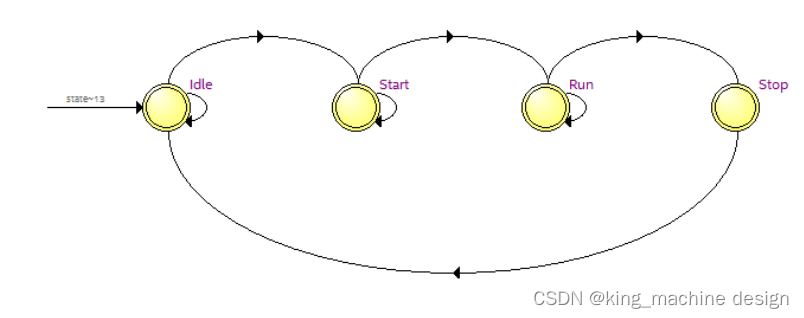
在程序中设计了 8 位的移位寄存器,在 Idle 状态下,判断 shift_start 信号是否为高,如果为高,进入 Start 状态,在 Start 状态延迟 100 个周期,进入 Run 状态,进行移位处理,如果shift_stop 信号有效了,进入 Stop 状态,在 Stop 状态,清零 q 的值,再跳转到 Idle 状态。
Mealy 有限状态机
Mealy 有限状态机,输出不仅与当前状态有关,也与输入信号有关,在 RTL 中会与输入信号有连接。
(CSDN代码块不支持Verilog,代码复制到notepad++编辑器中,语言选择Verilog,看得更清楚)
module top
(
input shift_start,
input shift_stop,
input rst,
input clk,
input d,
output reg [7:0] q
);
parameter Idle = 2'd0 ; //Idle state
parameter Start = 2'd1 ; //Start state
parameter Run = 2'd2 ; //Run state
parameter Stop = 2'd3 ; //Stop state
reg [1:0] state ; //statement
reg [4:0] delay_cnt ; //delay counter
always @(posedge clk or negedge rst)
begin
if (!rst)
begin
state <= Idle ;
delay_cnt <= 0 ;
q <= 0 ;
end
else
case(state)
Idle : begin
if (shift_start)
state <= Start ;
end
Start : begin
if (delay_cnt == 5'd99)
begin
delay_cnt <= 0 ;
state <= Run ;
end
else
delay_cnt <= delay_cnt + 1'b1 ;
end
Run : begin
if (shift_stop)
state <= Stop ;
else
q <= {q[6:0], d} ;
end
Stop : begin
q <= 0 ;
state <= Idle ;
end
default: state <= Idle ;
endcase
end
endmodule
Moore 有限状态机
Moore 有限状态机,输出只与当前状态有关,与输入信号无关,输入信号只影响状态的改变,不影响输出,比如对 delay_cnt 和 q 的处理,只与 state 状态有关。
module top
(
input shift_start,
input shift_stop,
input rst,
input clk,
input d,
output reg [7:0] q
);
parameter Idle = 2'd0 ; //Idle state
parameter Start = 2'd1 ; //Start state
parameter Run = 2'd2 ; //Run state
parameter Stop = 2'd3 ; //Stop state
reg [1:0] current_state ; //statement
reg [1:0] next_state ;
reg [4:0] delay_cnt ; //delay counter
//First part: statement transition
always @(posedge clk or negedge rst)
begin
if (!rst)
current_state <= Idle ;
else
current_state <= next_state ;
end
//Second part: combination logic, judge statement transition condition
always @(*)
begin
case(current_state)
Idle : begin
if (shift_start)
next_state <= Start ;
else
next_state <= Idle ;
end
Start : begin
if (delay_cnt == 5'd99)
next_state <= Run ;
else
next_state <= Start ;
end
Run : begin
if (shift_stop)
next_state <= Stop ;
else
next_state <= Run ;
end
Stop : next_state <= Idle ;
default: next_state <= Idle ;
endcase
end
//Last part: output data
always @(posedge clk or negedge rst)
begin
if (!rst)
delay_cnt <= 0 ;
else if (current_state == Start)
delay_cnt <= delay_cnt + 1'b1 ;
else
delay_cnt <= 0 ;
end
always @(posedge clk or negedge rst)
begin
if (!rst)
q <= 0 ;
else if (current_state == Run)
q <= {q[6:0], d} ;
else
q <= 0 ;
end
endmodule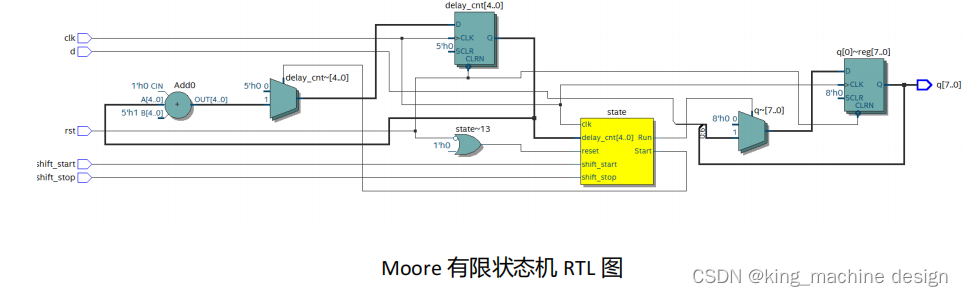
激励文件:
`timescale 1 ns/1 ns
module top_tb() ;
reg shift_start ;
reg shift_stop ;
reg rst ;
reg clk ;
reg d ;
wire [7:0] q ;
initial
begin
rst = 0 ;
clk = 0 ;
d = 0 ;
#200 rst = 1 ;
forever
begin
#({$random}%100)
d = ~d ;
end
end
initial
begin
shift_start = 0 ;
shift_stop = 0 ;
#300 shift_start = 1 ;
#1000 shift_start = 0 ;
shift_stop = 1 ;
#50 shift_stop = 0 ;
end
always #10 clk = ~clk ;
top t0
(
.shift_start(shift_start),
.shift_stop(shift_stop),
.rst(rst),
.clk(clk),
.d(d),
.q(q)
);
endmodule总结
在上面两个程序中用到了两种方式的写法,第一种的 Mealy 状态机,采用了一段式的写法,只用了一个 always 语句,所有的状态转移,判断状态转移条件,数据输出都在一个 always 语句里,缺点是如果状态太多,会使整段程序显的冗长。第二个 Moore 状态机,采用了三段式的写法,状态转移用了一个 always 语句,判断状态转移条件是组合逻辑,采用了一个 always 语句,数据输出也是单独的 always 语句,这样写起来比较直观清晰,状态很多时也不会显得繁琐。















 1202
1202











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











