







pclpy KD-Tree K近邻搜索
一、算法原理
1.KD-Tree 介绍
kd 树或 k 维树是计算机科学中使用的一种数据结构,用于在具有 k 维的空间中组织一定数量的点。它是一个二叉搜索树,对其施加了其他约束。Kd 树对于范围和最近邻搜索非常有用。出于我们的目的,我们通常只会处理三维的点云,因此我们所有的 kd 树都是三维的。kd 树的每一层使用垂直于相应轴的超平面沿特定维度拆分所有子节点。在树的根部,所有子节点都将根据第一维进行拆分(即,如果第一维坐标小于根,它将在左子树中,如果大于根,则显然将在左子树中右子树)。树中的每一层都在下一个维度上进行划分,一旦所有其他维度都用尽,则返回到第一个维度。构建 kd 树的最有效方法是使用像 Quick Sort 那样的分区方法,将中点放在根处,将一维值较小的所有内容放在左侧,右侧较大。然后在左子树和右子树上重复此过程,直到要分区的最后一棵树仅由一个元素组成。
来自[维基百科]:
这是一个二维 KD-Tree的例子
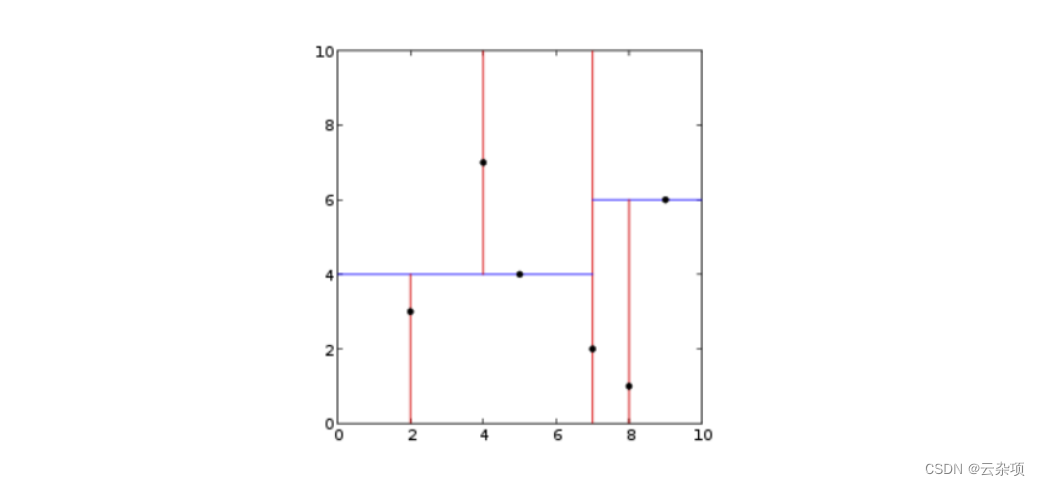
这是最近邻搜索如何工作的演示

2.原理
- KD-Tree构建: 首先,选择一个数据集中的点作为根节点,并根据这个点的一个坐标轴(通常是数据维度中的一个)将数据集分成两个子集。然后,对每个子集递归地应用相同的过程,选择该子集中的一个点作为子树的根节点,并使用另一个坐标轴来分割子集。这个过程一直持续下去,直到每个子集的大小达到某个阈值,或者直到无法再分割为止。
- 节点分割: 在每一层中,
kd-Tree选择一个坐标轴,然后根据该坐标轴上的中位数将数据集分成两半。这个过程使得树的每个节点都代表一个超矩形区域,其中包含了数据集的部分或全部点。 - 最近邻搜索: 在搜索时,从根节点开始,根据目标点的坐标与当前节点表示的超矩形区域的关系,递归地向下搜索。当搜索到达叶节点时,将该叶节点中的点与目标点进行比较,选择距离最近的点。然后,回溯到父节点,检查是否存在可能更近的点,如果存在,则继续向上回溯,直到搜索完成。
二、代码
from pclpy import pcl
if __name__ == '__main__':
# 读取点云数据
cloud = pcl.PointCloud.PointXYZ()
reader = pcl.io.PCDReader()
reader.read("res/bunny.pcd", cloud)
# 构建kd-tree
kdtree = pcl.kdtree.KdTreeFLANN.PointXYZ()
kdtree.setInputCloud(cloud)
# 设置一个点云点
searchPoint = pcl.point_types.PointXYZ()
searchPoint.x = cloud.xyz[0][0] # x
searchPoint.y = cloud.xyz[0][1] # y
searchPoint.z = cloud.xyz[0][2] # z
print(searchPoint)
# k最近邻搜索
k = 800
# 创建一个大小为 k 的整数向量,所有元素初始化为 0
pointIdxNKNSearch = pcl.vectors.Int([0] * k)
# 创建一个大小为 k 的float类型向量,所有元素初始化为 0
pointNKNSquaredDistance = pcl.vectors.Float([0] * k)
print('k 近邻点搜索点 (', searchPoint.x,
'', searchPoint.y,
'', searchPoint.z,
') k =', k)
# KdTree 返回 0 个以上的最近邻,打印
if kdtree.nearestKSearch(searchPoint, k, pointIdxNKNSearch, pointNKNSquaredDistance) > 0:
for i in range(len(pointIdxNKNSearch)):
print(" ", cloud.x[pointIdxNKNSearch[i]],
" ", cloud.y[pointIdxNKNSearch[i]],
" ", cloud.z[pointIdxNKNSearch[i]],
" (平方距离: ", pointNKNSquaredDistance[i], ")")
# 将搜索的点保存
searchPointArray = cloud.xyz[pointIdxNKNSearch]
searchCloud = pcl.PointCloud.PointXYZRGB.from_array(searchPointArray, [[1, 0, 0]])
viewer = pcl.visualization.PCLVisualizer("3D viewer") # 建立一个可视化对象,窗口名 3D viewer
viewer.addPointCloud(searchCloud) # 点云数据添加到可刷对象中
# viewer.addPointCloud(cloud) # 点云数据添加到可刷对象中
while not viewer.wasStopped(): # 展示可视化对象
viewer.spinOnce(10)
三、结果
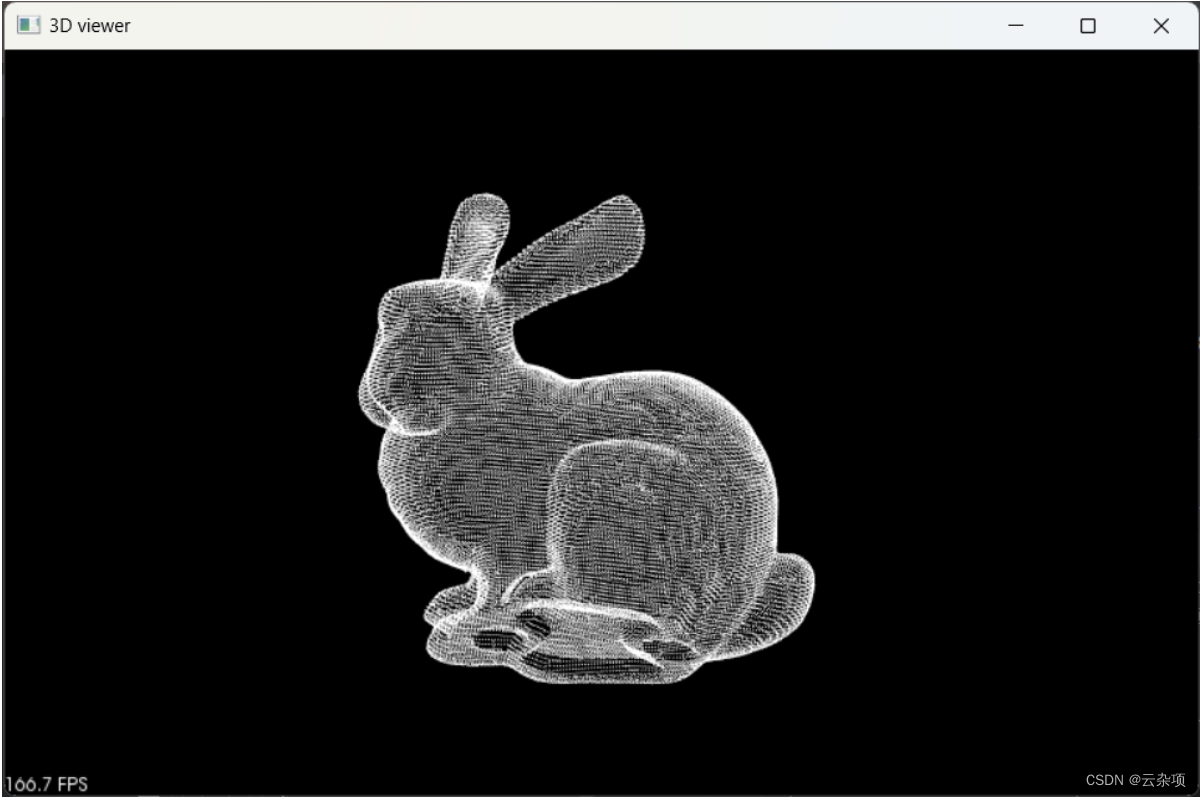
1.原点云
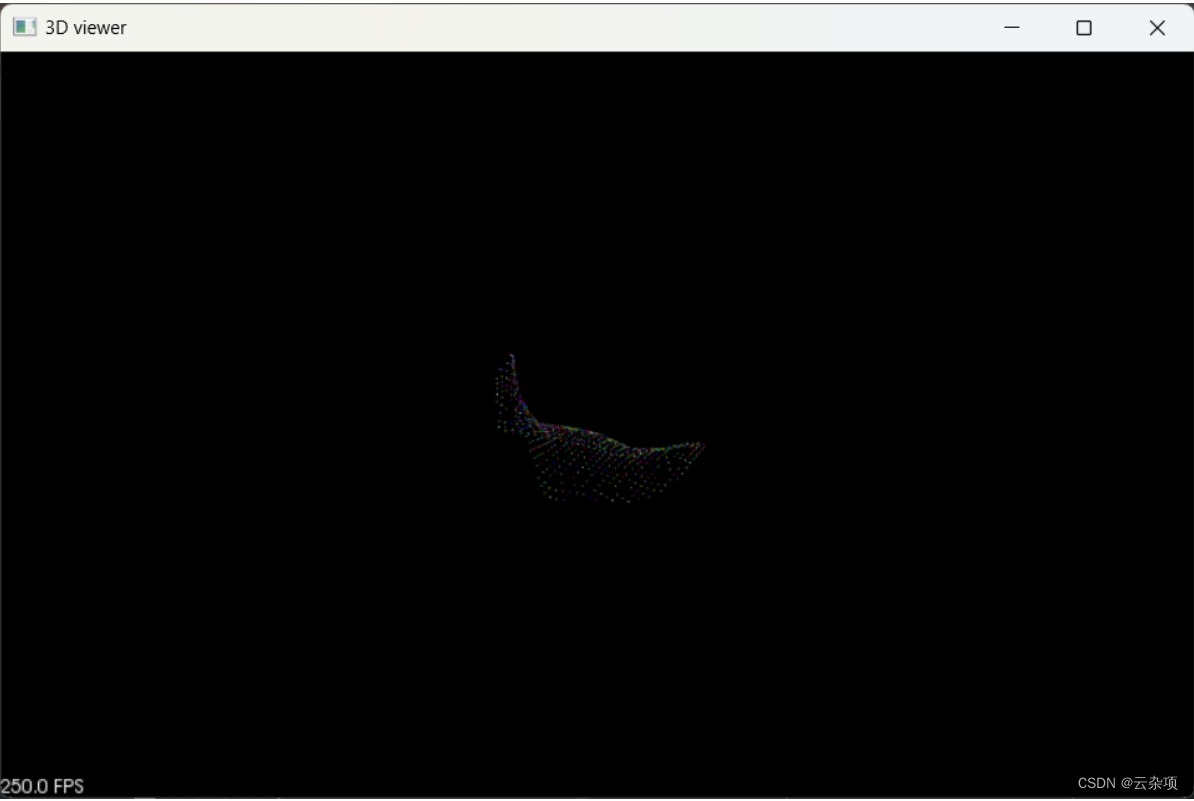
2.k近邻点搜索后的点云
四、相关数据
测试数据下载链接:https://pan.baidu.com/s/1uT6UbzU5h7wPurnQYUB7TQ
提取码:lsyg















 1817
1817











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











