







pclpy OC-Tree “体素内的邻居搜索”、“K 最近邻搜索”和“半径内的邻居搜索”
一、算法原理
1.介绍
八叉树是一种用于组织稀疏 3-D 数据的基于树的数据结构。
八叉树是一种基于树的数据结构,用于管理稀疏 3-D 数据。每个内部节点正好有八个子节点。在本教程中,我们将学习如何使用八叉树在点云数据中进行空间分区和邻居搜索。
2.“体素内的邻居搜索”、“K 最近邻搜索”和“半径内的邻居搜索”
体素内的邻居搜索
这里使用的第一种搜索方法是“体素内的邻居搜索”。它将搜索点分配给相应的叶节点体素并返回点索引向量。这些指数与落在同一体素内的点有关。因此,搜索点和搜索结果之间的距离取决于八叉树的分辨率参数。
# 体素最近邻搜索
pointIdxVec = pclpy.pcl.vectors.Int()
if octree.voxelSearch(searchPoint, pointIdxVec) > 0:
print('Neighbors within voxel search at (', searchPoint.x,
'', searchPoint.y,
'', searchPoint.z, ')\n')
for i in range(len(pointIdxVec)):
print(" ", cloud.x[pointIdxVec[i]],
" ", cloud.y[pointIdxVec[i]],
" ", cloud.z[pointIdxVec[i]], "\n")
K 最近邻搜索
在此示例中,K 设置为 10。“K 最近邻搜索”方法将搜索结果写入两个单独的向量。第一个 pointIdxNKNSearch 将包含搜索结果(索引引用关联的 PointCloud 数据集)。第二个向量保存搜索点和最近邻居之间的相应平方距离。
# # k最近邻搜索
k = 10
pointIdxNKNSearch = pcl.vectors.Int()
pointNKNSquaredDistance = pcl.vectors.Float()
print('K nearest neighbor search at (', searchPoint.x,
'', searchPoint.y,
'', searchPoint.z,
') with k =', k)
if octree.nearestKSearch(searchPoint, k, pointIdxNKNSearch, pointNKNSquaredDistance) > 0:
for i in range(len(pointIdxNKNSearch)):
print(" ", cloud.x[pointIdxNKNSearch[i]],
" ", cloud.y[pointIdxNKNSearch[i]],
" ", cloud.z[pointIdxNKNSearch[i]],
" (squared distance: ", pointNKNSquaredDistance[i], ")")
半径内的邻居搜索
“半径搜索中的邻居”的工作方式与“K 最近邻搜索”非常相似。它的搜索结果被写入两个单独的向量,描述点索引和平方搜索点距离。
# 半径最近邻搜索
pointIdxRadiusSearch = pcl.vectors.Int() # 生成向量
pointRadiusSquaredDistance = pcl.vectors.Float() # 生成向量
radius = np.random.ranf(1) * 256.0
print("Neighbors within radius search at (", searchPoint.x,
" ", searchPoint.y, " ", searchPoint.z, ") with radius=",
radius, '\n')
if octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0:
for i in range(len(pointIdxRadiusSearch)):
print(" ", cloud.x[pointIdxRadiusSearch[i]],
" ", cloud.y[pointIdxRadiusSearch[i]],
" ", cloud.z[pointIdxRadiusSearch[i]],
" (squared distance: ", pointRadiusSquaredDistance[i], ")")
可视化代码
searchPointArray = cloud.xyz[pointIdxVec] # pointIdxVec 筛选的索引
searchCloud = pcl.PointCloud.PointXYZ.from_array(searchPointArray)
viewer = pcl.visualization.PCLVisualizer("3D viewer") # 建立一个可视化对象,窗口名 3D viewer
viewer.addPointCloud(searchCloud) # 点云数据添加到可刷对象中
while not viewer.wasStopped(): # 展示可视化对象
viewer.spinOnce(10)
二、代码
from pclpy import pcl
import numpy as np
if __name__ == '__main__':
# 生成点云数据
cloud = pcl.PointCloud.PointXYZ()
pcl.io.loadPCDFile('res/bunny.pcd', cloud)
# 构建OC-Tree
resolution = 128.0
octree = pcl.octree.OctreePointCloudSearch.PointXYZ(resolution)
octree.setInputCloud(cloud)
octree.addPointsFromInputCloud()
# 生成一个索引点
searchPoint = pcl.point_types.PointXYZ()
searchPoint.x = cloud.xyz[0][0] # x
searchPoint.y = cloud.xyz[0][1] # y
searchPoint.z = cloud.xyz[0][2] # z
print(searchPoint)
# 体素最近邻搜索
pointIdxVec = pcl.vectors.Int()
if octree.voxelSearch(searchPoint, pointIdxVec) > 0:
print('体素最近邻搜索 (', searchPoint.x,
'', searchPoint.y,
'', searchPoint.z, ')')
for i in range(len(pointIdxVec)):
print(" ", cloud.x[pointIdxVec[i]],
" ", cloud.y[pointIdxVec[i]],
" ", cloud.z[pointIdxVec[i]])
# # k最近邻搜索
k = 10
pointIdxNKNSearch = pcl.vectors.Int()
pointNKNSquaredDistance = pcl.vectors.Float()
print('K nearest neighbor search at (', searchPoint.x,
'', searchPoint.y,
'', searchPoint.z,
') with k =', k)
if octree.nearestKSearch(searchPoint, k, pointIdxNKNSearch, pointNKNSquaredDistance) > 0:
for i in range(len(pointIdxNKNSearch)):
print(" ", cloud.x[pointIdxNKNSearch[i]],
" ", cloud.y[pointIdxNKNSearch[i]],
" ", cloud.z[pointIdxNKNSearch[i]],
" (squared distance: ", pointNKNSquaredDistance[i], ")")
# 半径最近邻搜索
pointIdxRadiusSearch = pcl.vectors.Int()
pointRadiusSquaredDistance = pcl.vectors.Float()
radius = 0.01 # 搜索半径
print("Neighbors within radius search at (", searchPoint.x,
" ", searchPoint.y, " ", searchPoint.z, ") with radius=",
radius, '\n')
if octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0:
for i in range(len(pointIdxRadiusSearch)):
print(" ", cloud.x[pointIdxRadiusSearch[i]],
" ", cloud.y[pointIdxRadiusSearch[i]],
" ", cloud.z[pointIdxRadiusSearch[i]],
" (squared distance: ", pointRadiusSquaredDistance[i], ")")
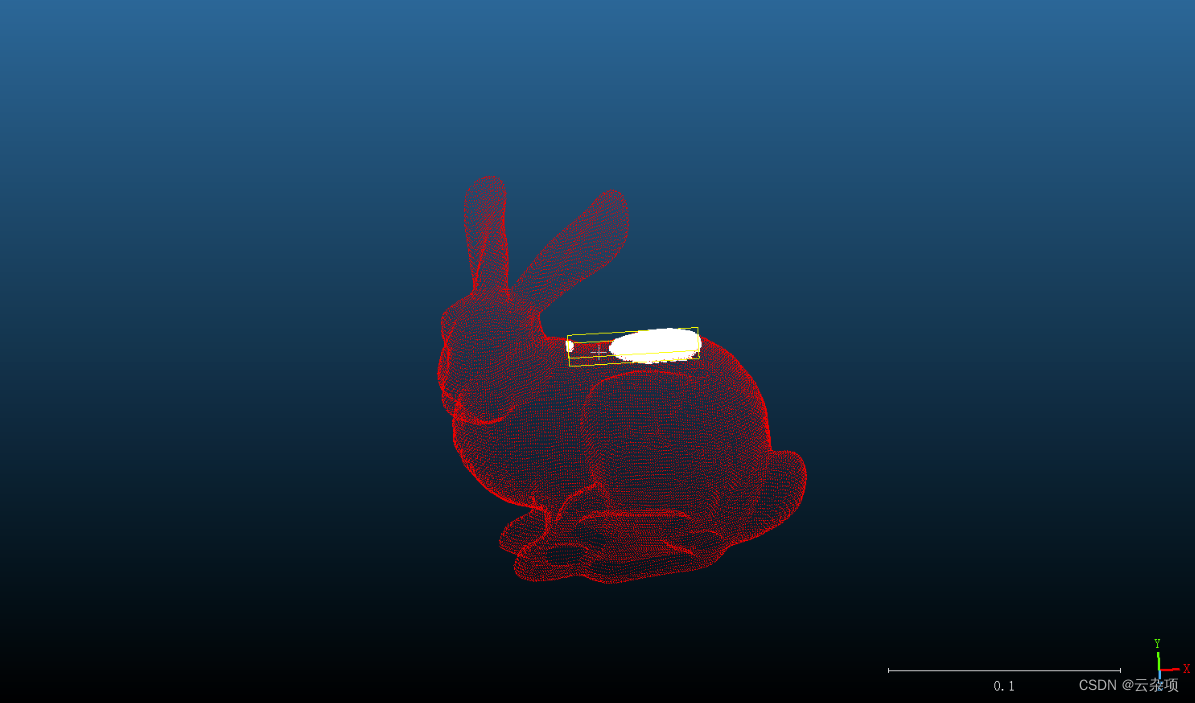
三、结果
1.原点云

2.体素内的邻居搜索
3.K 最近邻搜索
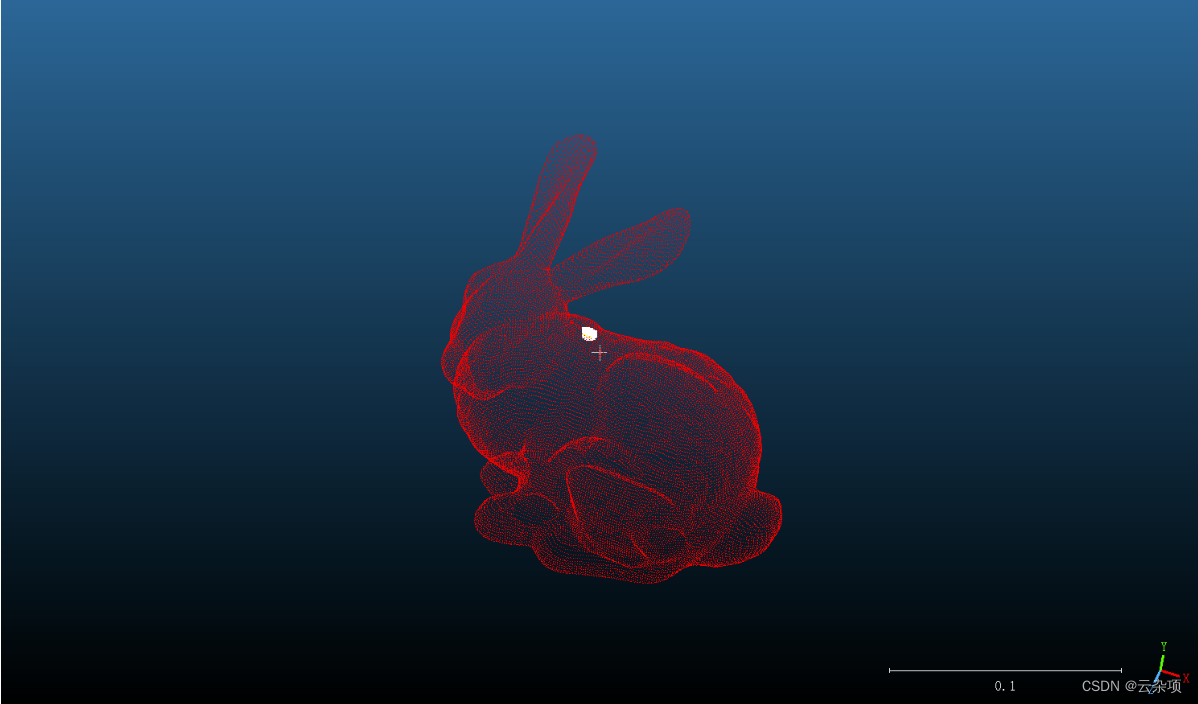
4.半径内的邻居搜索

四、相关数据
更多知识看专栏。。。















 2725
2725











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











