







目录
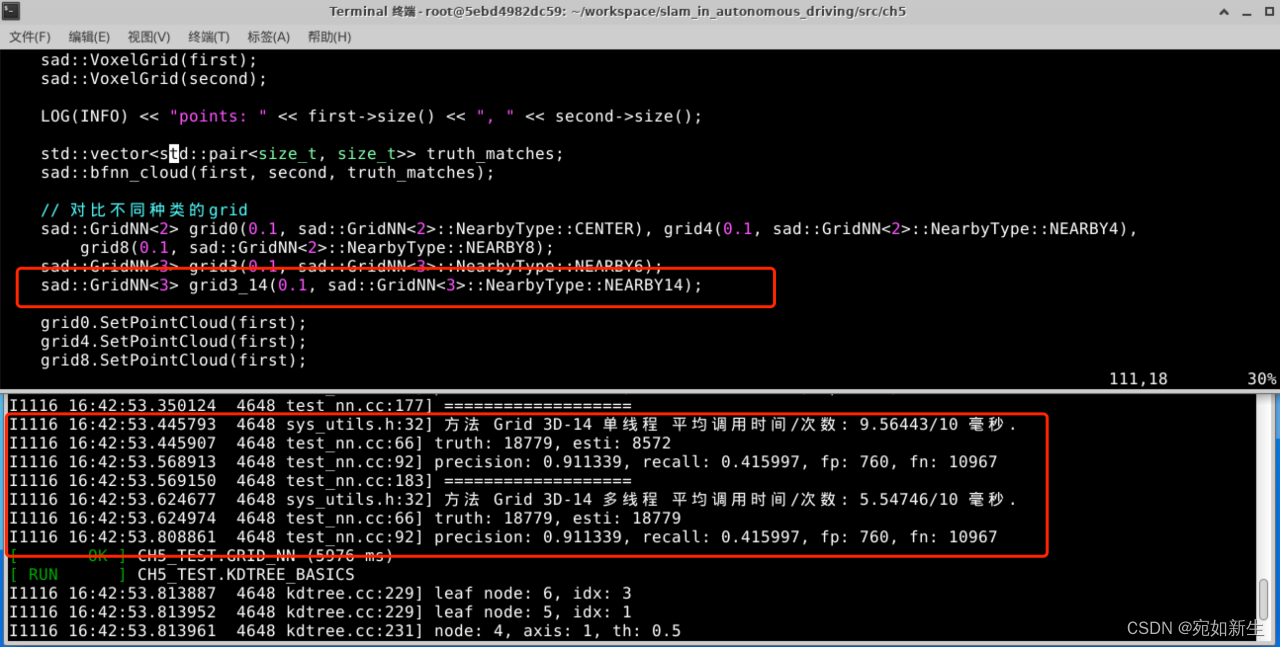
1.在三维体素中定义 NEARBY14,实现 14 格最近邻的查找。
在NearbyType中定义NEARBY14方法,并定义好nearby_grids_即可。

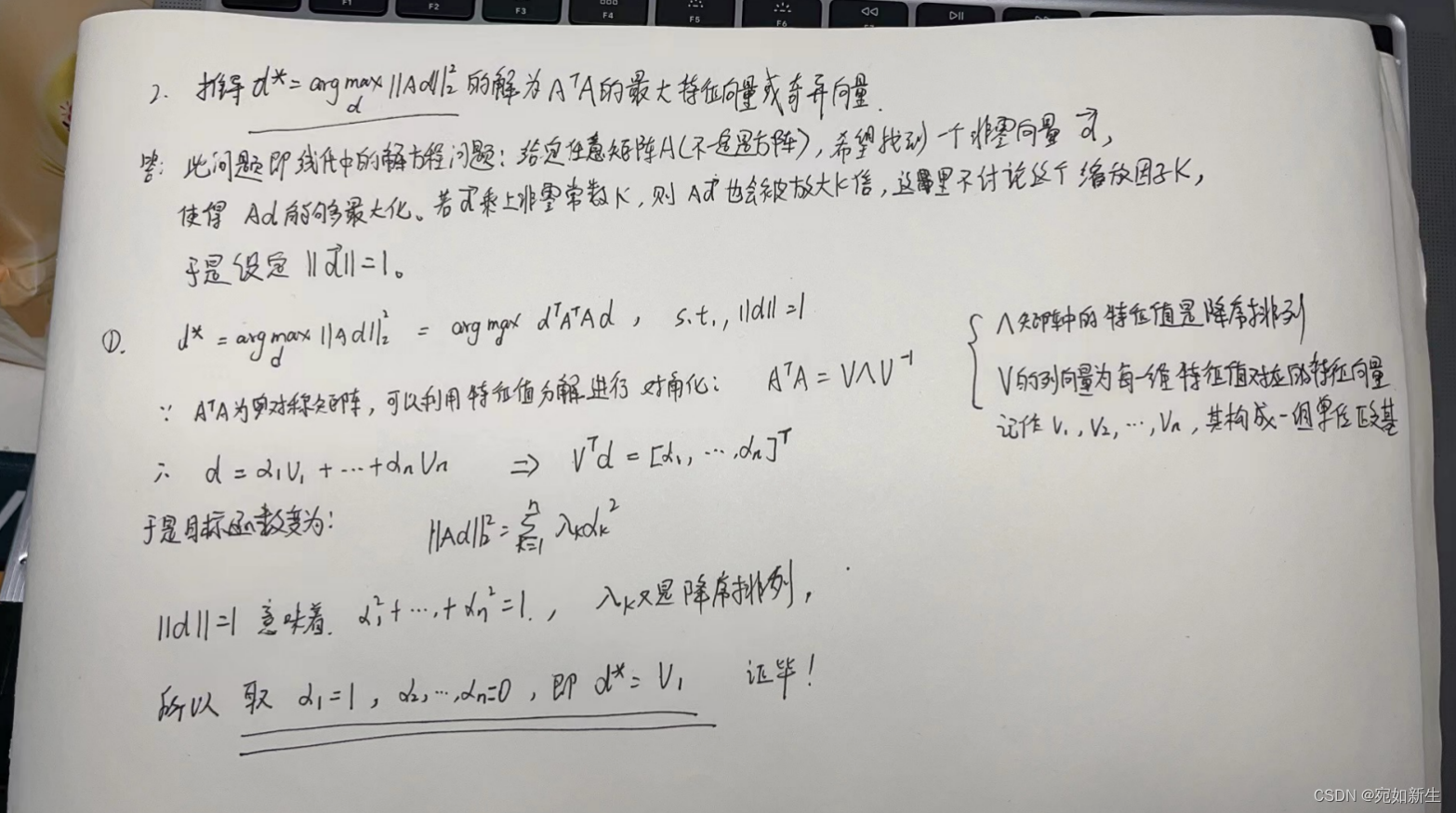
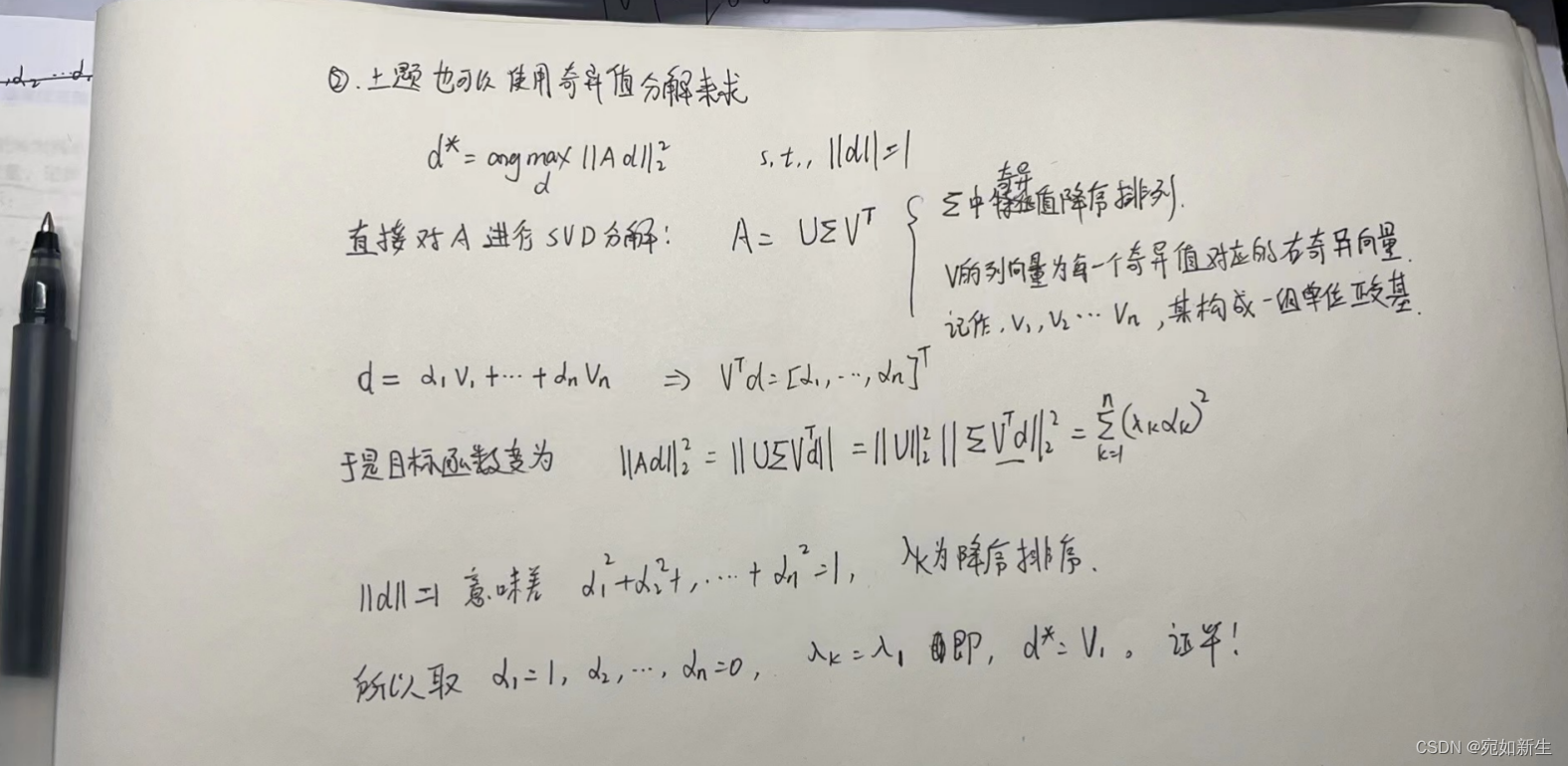
2.推导arg max||Ad||22的解为ATA的最大特征向量或者奇异向量。
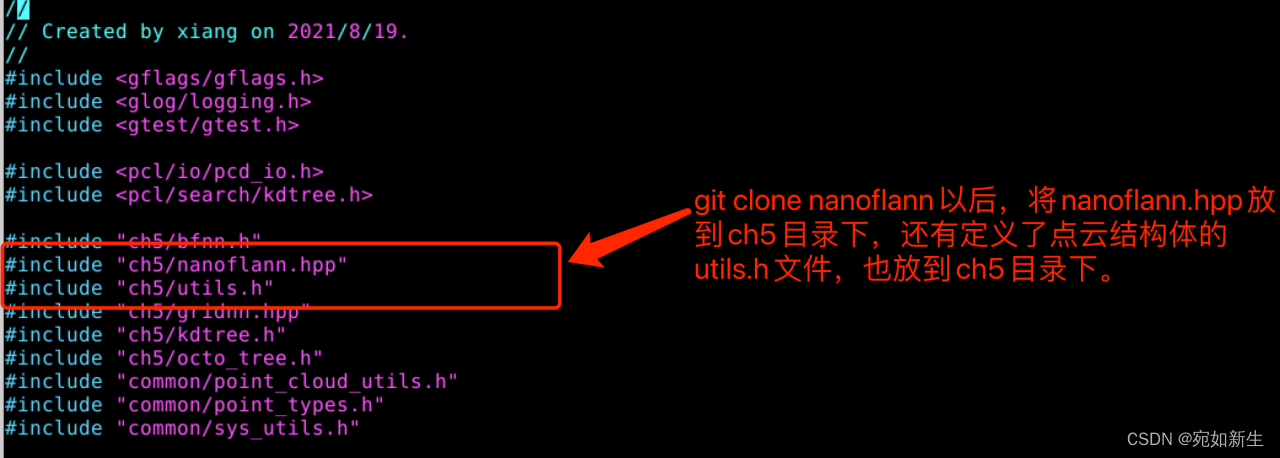
3. 将本节的最近邻算法与一些常见的近似最近邻算法进行对比,比如nanoflann,给出精度指标和时间效率指标。
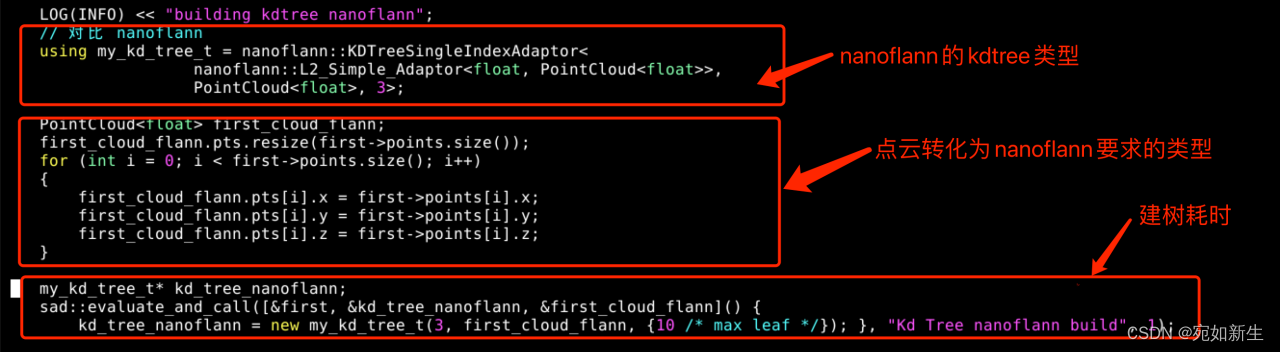
熟悉了nanoflann库中exemples中的例子,了解了构建kdtree以及K近邻搜索的方法。
nanoflann库构建kdtree需要的点云类型使用的是exemples中头文件utils.h中的定义,使用的K近邻搜索方法为knnSearch()函数。

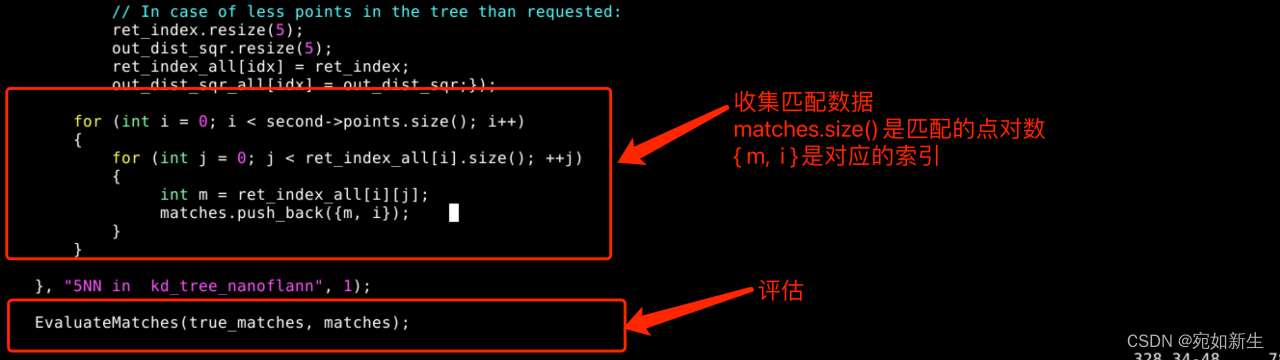
评估结果:
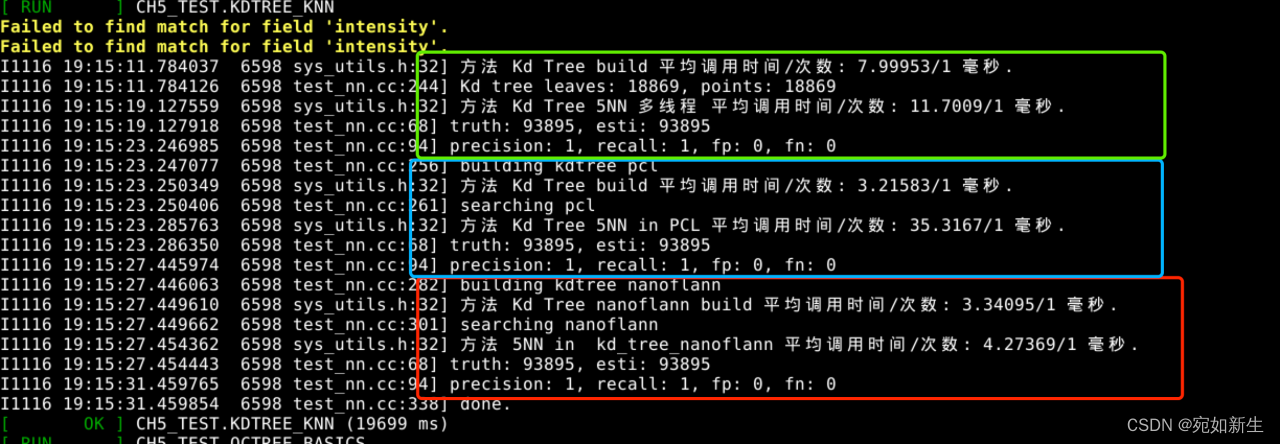
由上图所示:
①三种方法实现的KNN算法的准确率和召回率均为1,未出现漏检与误检的情况;
②在build tree的耗时方面,自定义的kdtree构建耗时较大(7.9毫秒),而pcl库和nanoflann库在build tree方面耗时水平相当(分别为3.2毫秒和3.3毫秒);
③在KNN检索调用耗时方面,nanoflann的4.27毫秒要优于自定义实现的7.9毫秒,并且远远优于pcl版本的35.3毫秒.

















 409
409











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











