









主要介绍
伴随我国汽车数量越来越多,汽车倒车引起的碰撞事故频发,尤其大货车司机倒车时盲区极大,造成磕碰或者堵车的现象。针对这种现实状况,需要研究一种安装在汽车上的能够辅助驾驶员倒车的系统,能够在司机倒车时进行尾部障碍物距离探测,并在达到危险距离时提示司机。本文设计了一种基于单片机的汽车倒车防撞报警系统,该系统采用STC89C52单片机作为主控制器,LCD1602作为显示器,利用超声波测距原理,实现汽车倒车时对尾部障碍物测距、实时显示、危险时刻进行报警的功能,并给出了系统的硬件电路和软件部分设计。该系统能够很好的满足防撞报警的需求,具有结构简单,操作便捷,成本低廉的特点,具有一定的实用价值。
关键词:STC89C52单片机;超声波测距;防撞系统
一、系统主要功能设计
本设计基于STC89C52芯片作为本设计的核心控制区域,通过对MCU芯片的性能及规格进行拓展,结合LCD显示器、独立按键、蜂鸣器、超声波接收一体模块等功能模块进行功能拓展。主要功能模块超声波测距模块,对障碍物距离进行判断并将测距数据传输给主控芯片进行数据处理和逻辑换算。LCD显示器是用来显示本设计的系统设置和超声波测距的实时距离数据显示。独立按键是用来实现对系统的设置,基本原理是通过对独立按键进行功能映射,通过设置好的功能映射对系统进行设置配置,完成相应的动作设置。蜂鸣器作为本设计的报警外设,主要实现声响报警。本设计的基本工作逻辑是提前通过独立按键对系统的测距距离进行阈值设置,当超声波开始测距工作时,LCD显示器上会实时显示超声波测距的距离大小,并且当超声波测距的距离小于设置的阈值时,蜂鸣器会开始声响报警。
本设计研究基于市场上常用的超声波测距模块,对超声波测距模块进行基本原理的了解和相关知识的查询,结合相关外设和主控芯片的工作机制,进行相应的硬件整合,结合软件进行功能调试,最终实现本设计的设计需求。
二、系统硬件设计
1硬件系统开发环境
Altiumde sign是一款专用的硬件电子开发系统,该系统与仿真软件PROTUES有所不同,它具有电路设计自动化的特点,不仅可以对硬件原理图的绘制,还具有集成库、原理图库以及封装库设计的功能,在导入PCB布局中,若元器件的封装不能满足现有的需求时,可以重新对封装和引脚进行定义。随着新型的元器件不断更新,现有电路图中越来越大,线路设计也越来越严格,电路的设计和PCB的布局已经无法通过仿真软件PROTUES实现,电路设计自动辅助系统已经是一种必不可少的开发工具,它不仅可以多元化的设定,还可以在设计中自定义DRC设计规则和自动辅助布局布线,能很大程度上提高了开发者的效率,该系统是目前市场上工作效率最高,质量最佳的的一款硬件电路设计软件。如下图所示位该系统的开发界面图:
图3.1硬件系统开发环境
2系统硬件总体设计
本设计以STC89C52芯片作为本设计的核心控制芯片,以STC89C52芯片为本设计的核心,结合独立按键、蜂鸣器、LCD显示器、超声波测距模块进行功能拓展,通过主控芯片对相关模块进行功能拓展和驱动,主控芯片对相应的数据进行进行处理和逻辑换算,最终实现本设计的设计需求,具体的硬件设计框图如图3.2.1所示。
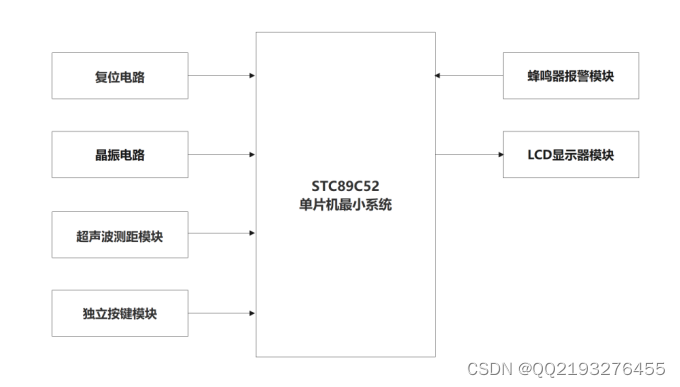
图3.2.1基于51单片机的超声波避障设计硬件框图
从结构图中可直观的看到系统由四大部分组成,分别是信号的输入、系统供电、信号的输出、单片机处理。
信号输入:信号输入有两路组成,分别是按键输入和超声波信号输入,其中按键部分是用户对超声波各个报警阈值参数的设定;超声波信号输入由四个方向的超声波检测信号组成。
信号输出:信号输入也由两部份组成,分别是液晶显示器显示输出和蜂鸣器报警输出,其中液晶显示器主要是设定的报警阈值,以及四路超声波检测到距离障碍物的距离;而蜂鸣器报警当检测出的距离处于危险距离时进行信号输出报警。
主控部分:主控芯片是系统的核心处理中央,负责控制传感器信号的采集和用户按键信号的处理,以及信号的输出控制都是在单片机内部进行处理,一个好用的处理器是作品成功的关键。
电源部分:系统电源为所有的传感器和元器件以及单片机提供能源,保证系统的正常运作,是任何一个设备必不可少的部分;本次设计所用的传感器型号的供电范围都在3v-5v之间,即可采用常见的usb电源供电。
三、软件设计
1 系统软件开发环境KEIL介绍
Keil软件是美国KEIL softwore公司设计的一款嵌入式处理器程序编程的开发工具,该软件中集成C语言开发环境、宏定义和汇编程序开发环境、C++K开发环境以及DEBUG在线调试开发环境,是目前市场上使用率最高,程序开发效率最高的软件编程系统之一。
该软件在更新到KEIL3版本之后,集成适配ARM公司的MDK环境编译器,支持ARM7\ARM9等基于M3内核的处理器,大疆的四轴飞行器、以及大部分的智能机器人都是基于该环境开发的,版本更新到KEIL4之后,加入窗口管理系统,页面更加整洁的同时,还实现了系统内部的自启动代码和集成flash烧写器,可同时兼容C51开发环境和ARM开发环境,系统性能大幅度提高。如下图所示位KEIL软件开发环境截图:

图4.1软件系统开发环境
2 程序烧录软件STC-ZIP
51系列的单片机程序烧录方式有两种,一种是PZ-ISP,另一种是STC-ISP。STC-ISP程序烧录软件对比PZ-ISP烧录软件更加的全面化,不仅可以烧录51系列的所有软件,还集成了串口通信协议功能,在用户程序调试时,可作为窗口传送数据,在软件调试过程中有很强的辨识度。而PZ-ISP具有程序自动下载的功能,相对比STC-SIP下载时的手动上电,更加的快捷,但芯片的容错率较低,不适合新手的应用,本次设计经过多方面的对比,采用STC下载器,如下图所示位该软件下下载界面截图:
图4.2程序烧录开发环境
3 系统主程序软件介绍
本设计的整体软件系统框架是采用底层驱动的模块化程序和上层逻辑运算的方式,主要的开发流程是先对底层功能模块进行驱动开发,例如对LCD显示器的显示驱动开发、超声波测距的驱动开发和蜂鸣器的驱动开发等。通过底层模块的驱动开发和调试完成后将驱动进行封装固化,最后将模块结合到系统主程序上。系统主程序主要进行功能模块的调用的和逻辑交互,最终实现本设计的设计需求。系统的主程序的工作流程如图4.3所示。
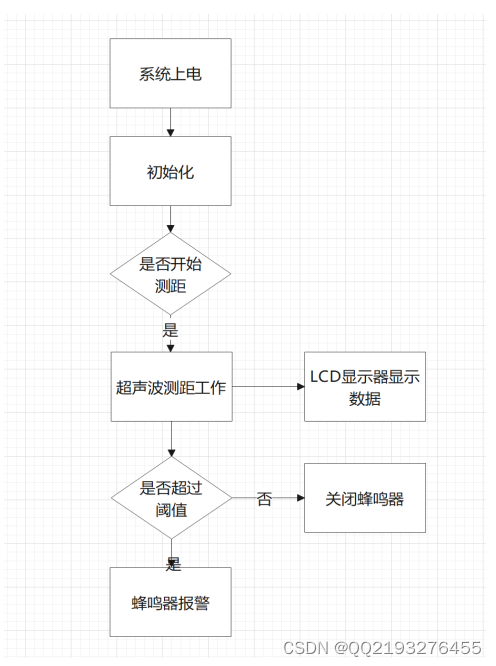
图4.3系统主程序逻辑图
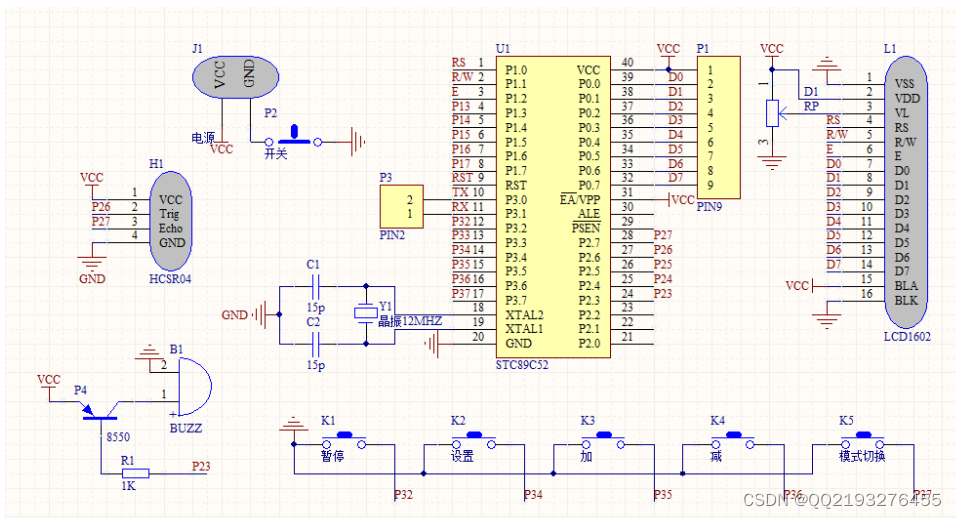
4 原理图
总结
超声波测距是一种非接触测距,是在基于AT89S51作为控制中心的倒车雷达系统。通过单片机控制超声波发射,通过定时器计算出超声波到达障碍物的时间,同时有温度补偿接口,计算出实际超声波速度,有单片机处理数据得到精确的距离,并加以显示和报警。作为一种辅助安全系统,消除了倒车视线盲区,让驾驶员倒车更加安全,具有很强的实用性。本设计通过基本的程序设计和硬件调试,基本上满足了本设计最开始的设计需求。但是在前期的方案选型中,受限于诸多的影响因数,例如本人的软件开发能力有限等,故在前期的方案选型中优先选择较为基础型的芯片,因此也限制了本设计的系统性能和功能拓展性,故再此将本设计的在开发过程中的灵思妙想记录下来,等待本人的开发能力上来之后对本设计的进行改进和优化。
1、更换主控芯片为STM32系列的芯片。STM32系列芯片是一款32位的MCU芯片,性能、运算资源、结构资源等都远远大于STC51系列的芯片。STM32系列的芯片的性能和拓展性也远远大于市面上的其他芯片。通过STM32芯片可以对本设计进行更多功能拓展和设计。
2、增加嵌入式蓝牙转串口模块;对本设计进行功能拓展,通过增加蓝牙模块之后进行开发,为本设计增加了无线通讯功能,使本设计可以与上位机进行数据交互通讯。可以实现手机端对设备下发相关控制指令和和获取超声波测距的数据。
3、增加驱动电机模块,对本设计进行功能拓展,通过增加驱动电机模块进行开发,使本设计具有位移的功能,可以用来模拟设备位移时获取超声波测距模块的数据变化。并且通过对电机驱动模块的开发,可以模拟超声波避障设计在车上的应用场景。
4、增加超声波测距模块的数量。对本本设计进行功能优化,通过增加超声波测距模块的数量,在结构上通过不同的摆放位置,实现多方位的避障功能设计。
5、更新LCD显示器为LCD12864显示器,随着本设计的功能拓展之后,原先的LCD1602显示器已经明显满足不了本设计的显示内容,故将LCD1602显示器更换成显示内容更多的LCD12864显示器作为本设计的新LCD显示器。

















 1323
1323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









